FOSDEM 2026 is a wrap, and what an exciting time it was. From a packed PX4 meetup in Leuven to FOSDEM in Brussels, the Dronecode community showed up strong for the largest free and open source developer gathering in Europe.

The Dronecode Foundation is pleased to announce that LECENT has joined as a Silver Member. A core component supplier for unmanned systems, LECENT designs and manufactures a comprehensive range of hardware including flight controllers, GNSS modules, and peripherals that support the full spectrum of unmanned platforms, including multi-rotor and fixed-wing aircraft, VTOL, helicopters, unmanned ground vehicles, and surface and underwater vessels.
LECENT’s product lineup includes the Falcon series of flight controllers (Falcon 7-EVO, Falcon 6X, and Falcon 7-Nano), the Arrow series of GNSS modules (Arrow 4 SE, Arrow 3X, Arrow 4 Nano, and Arrow 3-RTK), and a range of supporting peripherals including the ACER-2 airspeed sensor, L-COMPASS, L-PMU 2L power management unit, and L-R8 receiver. Their breadth of hardware offerings reflects a deep commitment to building reliable, intelligent components for professional unmanned systems.
“As a core component supplier, joining the Dronecode community allows us to contribute directly to the open-source ecosystem, which aligns with our commitment to open collaboration. Looking ahead, we aim to help bridge cutting-edge component design with open-source technology, empowering developers to build more reliable and intelligent unmanned systems.” — Richard, CTO, LECENT
LECENT’s membership brings valuable component-level expertise to the Dronecode ecosystem, strengthening the foundation’s ability to support developers building on open standards. We warmly welcome the LECENT team and look forward to their contributions to the open-source aerial robotics community.
]]> The Dronecode Foundation is pleased to announce that NewBeeDrone has joined as a Silver Member. Based in San Diego, California, NewBeeDrone is a drone hardware manufacturer and retailer with deep roots in the FPV and micro-drone community, serving pilots from beginner builders up to seasoned operators around the world.
The Dronecode Foundation is pleased to announce that NewBeeDrone has joined as a Silver Member. Based in San Diego, California, NewBeeDrone is a drone hardware manufacturer and retailer with deep roots in the FPV and micro-drone community, serving pilots from beginner builders up to seasoned operators around the world.
NewBeeDrone designs and manufactures a range of components and ready-to-fly platforms, including their well-known AcroBee and Hummingbird lines of drones, as well as electronics, frames, and motors for ducted and open-prop configurations across a variety of build sizes. The company has built a strong reputation for quality hardware and responsive customer support. Their focus on accessible, well-documented products reflects the same spirit of openness that drives the Dronecode ecosystem.
“The open-source community has played an essential role in shaping the modern UAV ecosystem. At NewBeeDrone, we believe long-term industry progress depends on healthy collaboration between developers, manufacturers, and contributors. Joining Dronecode reflects our desire to support that collaborative foundation and help strengthen the standards and technologies that move our industry forward.” — Kelvin Lee, Founder & CEO, NewBeeDrone
NewBeeDrone’s membership brings a valuable manufacturer’s perspective grounded in the day-to-realities of the drone market and domain expertise in the FPV space, a valuable addition to Dronecode’s growing community of contributors and innovators. We warmly welcome NewBeeDrone to the Dronecode Foundation and look forward to their contributions to the open source aerial robotics ecosystem.
]]>
We’re excited to announce that Dronecode will be part of the next ROS By-The-Bay / PX4 Collaborative Meetup, taking place on February 26, 2026, in Mountain View, California. Organized by the ROS by the Bay community, this monthly gathering brings together ROS and PX4 users across the Bay Area.
The meetup will be held at the regular Intrinsic / Google X location at 250 West Mayfield Avenue in Mountain View, running from 6:00 PM to 9:00 PM PST in the Space Invaders Conf. Room.
Talks
State of the PX4 Ecosystem
 Ramón Roche, General Manager of the Dronecode Foundation
Ramón Roche, General Manager of the Dronecode Foundation
Ramón will share an update on the current state of the PX4 ecosystem and upcoming work across Dronecode’s projects.
Hardware Abstraction Layers as an Alternative to ROS 2 Control
Zeerek Ahmad, Senior Robotics and Controls Engineer at Polymath Robotics
Zeerek will discuss the development of Polymath’s Hardware Abstraction Layer(s) and how they offer an alternative to ROS 2 control for improved scalability and reliability.
Event Details
Date: February 26, 2026
Location: 250 Mayfield Ave, Mountain View, CA
Time: 6:00 PM to 9:00 PM PST
RSVP: Register on Meetup
Whether you’re a local Bay Area developer or just passing through, come join us for an evening of talks, demos, and networking with the ROS and PX4 communities. We look forward to seeing you there!
]]>


We kicked things off on Friday, January 30 with a half-day PX4 community meetup in Leuven. Big thanks to Septentrio (part of Hexagon) for sponsoring the event and to DeltaQuad for extending the evening and sponsoring drinks. The event brought together PX4 developers, GNSS engineers, and drone enthusiasts for an afternoon of technical sessions and community connection at De Hoorn Bar & Resto.

The agenda covered PX4 project updates, a deep dive into GNSS jamming and spoofing mitigation, and a hands-on look at the PX4-Septentrio integration. Attendees got to see live demos of jamming detection, autopilot setups, and ROS integration, followed by an open community feedback session.

The energy was great, the conversations were even better, and the meetup was a strong start to the year for the PX4 community in Europe.
FOSDEM Stand: Dronecode + The Zephyr Project

At FOSDEM itself, we shared stand AW-06 with The Zephyr Project across both days of the conference. The stand featured live demos, PX4-powered hardware on display, and plenty of stickers. We spent the weekend fielding questions about getting started with PX4, discussing Pixhawk standards, ROS 2 integration, and connecting with developers from across the open source embedded systems world.

Robotics and Simulation Devroom
The Robotics and Simulation devroom returned for its second year at FOSDEM, and it was packed. The devroom hosted 22 talks throughout the day in room UB2.147, with a long queue outside for most of the day — a clear sign that interest in open source robotics continues to grow.
Our Talk: Precision Landing with PX4 and ROS 2 Using Aruco Markers
Ramon Roche and Beniamino Pozzan took the stage in the Robotics and Simulation devroom to present “Precision Landing with PX4 and ROS 2 using Aruco Markers.” The session walked through a complete precision landing pipeline built with PX4, ROS 2, OpenCV, Aruco markers, and Gazebo, the same pipeline used in our hands-on workshops.
The talk covered the pieces of PX4 architecture that matter to ROS developers, the PX4 ROS 2 interface (including the PX4 ROS 2 Library by Auterion), simulation with Gazebo, OpenCV-based Aruco detection, and a precision landing controller using PI velocity control. The goal was practical: give ROS developers a working example they can take home and run on their own machines.
A Docker container and open repository with all the source code were made available for anyone who wants to reproduce the full pipeline.

Linux Foundation FOSDEM Reception

On Saturday evening, we attended the Linux Foundation’s annual FOSDEM reception at Au Bassin in Brussels. It was a great chance to connect with folks from across the LF project ecosystem in a more relaxed setting and continue the conversations that started during the day.
Thank You
FOSDEM week was a reminder of why open source communities matter. From the technical depth of the devroom to the hallway conversations at the stand to the laughs over drinks in Leuven, these events are where collaboration happens and where ideas turn into code.
Thank you to everyone who attended, presented, volunteered at the stand, or simply stopped by to say hello. Thanks to Septentrio (part of Hexagon) for sponsoring the Leuven meetup, DeltaQuad for extending the party, The Zephyr Project for sharing the stand, and FOSDEM for making it all possible.
Get Involved
Want to stay connected with the Dronecode community? Here’s where to find us:
- Dronecode Foundation: dronecode.org
- Dronecode Discord: chat.dronecode.org
- PX4 Discussions: discuss.px4.io
See you at the next one.

We are pleased to announce the newly elected Silver Member representatives to the Dronecode Board of Directors: Andrew Wilkins, Ryan Johnston, and Robert Cheek. The election was held over the past few weeks, and the new board members will begin their terms this month. This year’s election saw our most competitive race to date, with five outstanding candidates vying for three seats. We are grateful to all the nominees who put themselves forward and to our Silver Members for their participation in this important community process. The newly elected directors bring a wealth of experience in drone technology, open source development, and commercial operations that will help guide Dronecode into its next chapter.
Meet Our New Board Members
Robert Cheek – UVify

Robert Cheek is the COO of UVify, where he helped scale IFO, the swarm light show drone powering the industry’s most widely deployed professional drone swarms, with 18+ Guinness World Records achieved. Robert has supported Dronecode and PX4 since the beginning because he believes the Linux Foundation model wins: open, vendor-neutral collaboration that raises the baseline for everyone and lets members differentiate above it. His vision is to make Dronecode the easiest, most trusted path from code to flight by reducing contributor friction, improving release quality, and strengthening interoperability.
Ryan Johnston – Applied Aeronautics

Ryan Johnston is the CEO of Applied Aeronautics. He is known for his leadership, ingenuity, and deep commitment to the open source community. Ryan leads by doing, supporting others, and pushing the community forward. His vision is a genuinely open and interoperable future where innovation moves faster because everyone is empowered to contribute. As a steward of open source and a generous mentor, Ryan brings exactly the perspective and energy needed to help guide Dronecode into its next chapter.
Andrew Wilkins – Ascend Engineering

Andrew Wilkins is the CEO of Ascend Engineering. He does extensive contracting work with various PX4-related projects and has a strong sense of what these projects need from Dronecode. Ascend Engineering currently employs two PX4 maintainers, giving Andrew direct insight into the technical needs and direction of the community.
A Thank You to All Nominees
We also want to thank Alex Klimaj of ARK Electronics and Godfrey Nolan of RIIS LLC for their willingness to serve on the Board. They are valuable community members, and we hope they will consider running again in future elections.
The Current Board of Directors
The 2026 Board of Directors are:
- Lorenz Meier (Community Director) — Chairman
- Daniel Agar (PX4 Maintainer) — TSC Chairman
- Robert Cheek (UVify) — Silver Director
- Ryan Johnston (Applied Aeronautics) — Silver Director
- Andrew Wilkins (Ascend Engineering) — Silver Director
First Board Meeting
The newly elected board will hold its first meeting at the Linux Foundation Member Summit in Napa, California between February 23-25, 2026.
The Importance of Membership
Membership in the Dronecode Foundation is an opportunity to take an active role in supporting the growth and evolution of the open drone ecosystem. Our members are part of a vibrant community, working together to advance the drone industry through open source. Learn more about membership here.
]]> Dronecode is making a big splash at FOSDEM 2026! FOSDEM is one of the largest gatherings of free and open source software developers in the world, drawing over 8,000 attendees to Brussels each year. It’s completely free to attend, no registration required, just show up. The event runs January 31 – February 1, 2026 at the ULB Solbosch campus. With 65+ developer rooms, hundreds of talks, and project stands everywhere, it’s two days of nonstop open source. If you’ve never been, it’s worth the trip.
Dronecode is making a big splash at FOSDEM 2026! FOSDEM is one of the largest gatherings of free and open source software developers in the world, drawing over 8,000 attendees to Brussels each year. It’s completely free to attend, no registration required, just show up. The event runs January 31 – February 1, 2026 at the ULB Solbosch campus. With 65+ developer rooms, hundreds of talks, and project stands everywhere, it’s two days of nonstop open source. If you’ve never been, it’s worth the trip.
Plus, Dronecode will be there early to kickstart the festivities with our first international meetup of the year! Whether you’re a PX4 veteran or just curious about open source aerial robotics, here’s everything happening and how to get involved.
Pre-FOSDEM: PX4 Community Meetup in Leuven
Friday, January 30 | De Hoorn Bar & Resto, Leuven
Before the FOSDEM crowds descend on Brussels, join us for a half-day technical meetup in nearby Leuven, sponsored by Septentrio. This is our first European meetup of the year, and it’s shaping up to be a solid opportunity to connect with the PX4 community.
What’s on the agenda:
- PX4 project updates and roadmap discussion
- GNSS jamming and spoofing: threats and mitigation strategies (Septentrio)
- PX4-Septentrio integration deep dive
- Live demos: jamming detection, autopilot setups, ROS integration
- Community feedback session: what do you want from PX4 and GNSS suppliers?
Logistics:
- About 15 min walk from Leuven train station (20 min by train from Brussels)
- Parking available at Parking Vaartkom (Engels Plein)
- Food and drinks provided
- Post-event social at the on-site brewery or downtown Leuven
Register: https://luma.com/sw0ae3c1
FOSDEM Stand: Dronecode + Zephyr
We’re sharing a stand with the Zephyr Project at FOSDEM this year. Stop by to see live demos, products running on PX4 and Zephyr, and connect with project developers. We’ll have hardware on display, can answer questions about getting started with PX4, and are happy to talk about anything from Pixhawk standards to ROS 2 integration.
The stand will be staffed both days of the conference (Saturday January 31 and Sunday February 1). The exact building & location will be announced closer to the event.
Volunteers Needed: We’re looking for stand staff volunteers to help out during the conference. We’re working on providing PX4/Dronecode shirts for volunteers. If you’re interested, apply here: https://forms.gle/gsYCpcTEKxnAdcjc8
Robotics and Simulation Devroom Talk
Saturday, January 31 | 14:55 – 15:20 | Room UB2.147
“Precision Landing with PX4 and ROS 2 using Aruco Markers” Ramon Roche and Beniamino Pozzan
Many ROS developers know PX4 exists but never get the chance to actually poke at it. This talk gives you that chance.
We walk through a complete precision landing pipeline using PX4, ROS 2, OpenCV, Aruco markers, and Gazebo, built the same way we teach it in our hands-on workshops. You’ll see:
- The pieces of PX4 architecture that matter to you as a ROS developer
- How the PX4 ROS 2 interface works, including the PX4 ROS 2 Library by Auterion
- Simulation with Gazebo and OpenCV-based Aruco detection
- A precision landing controller with PI velocity control
- Frame transformations from camera optical frame to body frame to world frame
The goal is practical: by the end, you’ll understand how to take a tag pose from OpenCV and use it to land a drone on a target.
Full devroom schedule: https://fosdem.org/2026/schedule/track/robotics-and-simulation/
The Robotics and Simulation devroom runs all day Saturday with talks on Gazebo, ROS 2 Rust client libraries, PlotJuggler, iceoryx2, and plenty more. Worth blocking out the day if robotics is your thing.
Linux Foundation FOSDEM Reception
Saturday, January 31 | 18:00 – 21:00 CET | Au Bassin, Quai Au Briques 74, Brussels
The Linux Foundation is hosting their annual FOSDEM reception. A good chance to connect with folks from across the LF project ecosystem in a more relaxed setting.
Register: https://linuxfoundation.regfox.com/the-linux-foundation-fosdem-reception
Spread the Word
If you’re speaking at FOSDEM or attending the Robotics devroom, the devroom organizers have speaker graphics available: https://github.com/robotics-devroom/robotics-devroom.github.io/tree/main/events/fosdem26/speaker-graphics
Summary: Key Dates and Links
| Event | Date | Link |
| PX4 Community Meetup (Leuven) | Fri Jan 30 | Register |
| FOSDEM 2026 | Sat-Sun Jan 31 – Feb 1 | fosdem.org/2026 |
| Precision Landing Talk | Sat Jan 31, 14:55 | Schedule |
| LF Reception | Sat Jan 31, 18:00-21:00 | Register |
| Dronecode + Zephyr Stand | Sat-Sun Jan 31 – Feb 1 | At the venue |
See you in Belgium!
]]>

The Dronecode Foundation is excited to announce that Applied Aeronautics has joined the foundation as a Silver Member. With over a decade of experience designing and manufacturing long-range fixed-wing UAVs, Applied Aeronautics’ commitment to open source flight software aligns perfectly with Dronecode’s mission to foster innovation and the adoption of open standards within the global drone ecosystem.
Founded in 2014, Applied Aeronautics specializes in high-performance, cost-effective, UAV platforms. Their flagship product, the Albatross, is a long-ranged Group 2 fixed-wing platform with autonomous takeoff and landing capabilities. The team are active members of the PX4 community, and have contributed significantly in issue reporting, testing, and field validation for fixed wing aircraft development.
With deployments in over 55 countries, Applied Aeronautics’ drones are trusted by governments, defense contractors, research institutions, and commercial operators across applications including security and surveillance, infrastructure inspections, emergency response, precision agriculture, and public safety.
“We joined Dronecode because we believe in giving back to the ecosystem that helped all of us get here. When we invest in open platforms, open standards, and the people behind them, our entire industry moves forward. Through our time, expertise, and technology, we’re committed to supporting the community and helping elevate safety, reliability, and capability across the global UAV landscape.” — Meg Annand, Co-Founder & COO, Applied Aeronautics
Applied Aeronautics’ proven track record of delivering mission-ready UAV platforms validates the strength of open source, and their broader community support exemplifies the innovative attitude that propels drone development forward. We warmly welcome Applied Aeronautics to the Dronecode Foundation and eagerly anticipate their impactful contributions and innovations.
]]>
As we close out 2025, it’s time for our annual membership renewal cycle and board elections. This post covers everything you need to know about maintaining your membership, participating in our elections, and what to expect from board engagement in 2026.
Membership Renewals Are Open
Dronecode memberships automatically renew on January 1, 2026. If you haven’t already received your renewal notice, you should expect it soon. Per our bylaws, members receive renewal notifications 120 days and 90 days before December 31. The deadline for giving notice of non-renewal is November 30, 2025.
Important details:
- Members who wish not to renew must provide written notice to avoid payment reminders
- All Financial Obligations must be current to maintain good standing and participate in board elections
If you have questions about your membership status or renewal, contact us at [email protected].
2026 Board Elections
We’re kicking off our annual board election process to seat directors for 2026. The newly elected board will hold its first meeting at the Linux Foundation Member Summit in Napa, California, on February 23, 2026.
Who Gets to Vote?
Gold Members (voting as a class): There are currently no Gold Members
Silver Members (voting as a class): Under the Bylaws, the current number of Silver Memebrs are currently entitled to elect three Directors.
Platinum Members: Each Platinum member directly appoints one director to the board
Important eligibility requirements:
- Only members in good standing can nominate and vote
- Nominees must be employees of the nominating member organization
- Related Companies that are each Members can vote in elections, but any group of Related Companies may only be represented on the Board by a single Director. Where a member of a group of Related Companies is already represented on the Board, their Related Companies cannot nominate their own candidates
Election Timeline
December 8-20: Nomination Period
- Silver members submit nominee information
- Nominees must be employees of the nominating organization
December 23 – January 3: Holiday Break
- No election activity
January 6-17: Voting Period
Meet the nominees
- 10 business days for Silver members to cast votes
- Nominees may share qualifications with voters upon request
- Voting conducted via secure online platform
January 20-24: Results & Appeals
- Vote counting and result announcement
- Window for any challenges or appeals
January 27-31: Board Finalization
- Finalize board roster
- Notify Linux Foundation of new composition
February 23-25: First Board Meeting
- Newly elected board convenes at Linux Foundation Member Summit in Napa, California
How to Participate
We’ll be using simple online tools to make participation easy:
- Nominations: Google Forms for submitting nominee information
- Voting: OpaVote for secure, auditable electronic voting
Details and links will be provided in follow-up communications to eligible members.
What Happens at Board Meetings?
Dronecode board meetings are where strategic decisions get made. If you’re considering running for a board seat or just curious about what board service entails, here’s what typically happens:
Strategic Direction
- Roadmap planning for supporting Open Source Project communities
- Resource allocation across projects
- New project proposals and incubation decisions
- Long-term technology strategy discussions
Community and Ecosystem
- Developer community growth and engagement strategies
- Educational initiatives and documentation efforts
- Conference and event planning (PX4 Developer Summit, ROSCon, Open Source Summit)
- Academic and research partnerships
Standards and Collaboration
- Pixhawk hardware standards evolution
- MAVLink protocol development coordination
- Integration with ROS and adjacent ecosystems
- Cross-project alignment
Operational Matters
- Budget review and financial planning
- Membership applications and renewals
- Intellectual property and licensing discussions
- Linux Foundation coordination
Industry Engagement
- Coordination with member companies and sponsors
- Semiconductor partner relationships
- Regulatory and safety standards engagement
- Market trends and competitive landscape
Board members bring perspectives from industry, academia, and the open source community. Meetings are focused, practical, and driven by what’s best for the ecosystem.
2026 Board Meeting Schedule
The board will meet quarterly in 2026, with a mix of virtual and in-person opportunities:
Q1 2026
February 23, 2026 – Napa, California
In-person at Linux Foundation Member Summit
First meeting of the newly elected board
Q2 2026
Late May 2026 – Virtual Meeting
Proposed: May 27-29
Q3 2026
Late August 2026 – Virtual Meeting
Proposed: August 25-27
Q4 2026
October 6-8, 2026 – Prague, Czech Republic
In-person at Open Source Summit Europe
Estimated dates based on current event planning
In-person meetings offer valuable opportunities for deeper collaboration, relationship-building, and strategic planning. Virtual meetings keep us connected and moving forward between major events.
Why This Matters
Dronecode’s governance ensures that our projects remain community-driven, vendor-neutral, and focused on advancing open source drone and robotics technology. Board elections give our members direct influence over the foundation’s direction.
Whether you’re a Platinum member appointing your representative, a Gold or Silver member voting for directors, or someone considering membership to gain voting rights, your participation shapes the future of the ecosystem.
Questions?
If you have questions about membership renewals, election procedures, or board participation:
- Review the full Dronecode Bylaws
- Contact us at [email protected]
- Join our community discussions on chat.dronecode.org
We’re looking forward to a strong 2026 with your continued participation and leadership.

If you’re heading to FOSDEM at the end of January or are local to the area, join us for a half-day PX4 meetup in nearby Leuven. Sponsored by Septentrio, this event brings together drone and robotics developers, researchers, and industry professionals for hours of networking, fun, and knowledge sharing. Register for your spot today!
The agenda covers PX4 project updates and roadmap discussion, a deep look at GNSS jamming and spoofing threats alongside mitigation strategies, and a technical walkthrough of the PX4-Septentrio integration. Expect live demos on jamming detection, autopilot setups, and ROS integration.
Attend and connect with fellow developers at our first European meetup and see what the global PX4 developer community is all about. Taking place at De Hoorn Bar & Resto on Sluisstraat 79, about a 15-minute walk from Leuven train station (which is just 20 minutes by train from Brussels), food and drink is included. Plus, there’s a post-event social at the onsite brewery or downtown Leuven.
We’re also accepting additional talk submissions if you’d like to throw your hat into the ring. You can submit a proposal through the registration form. Whether you’re planning to talk or just attend, there’s no better place to connect with the open source drone developer community before FOSDEM.
]]>
Atlanta delivered! The community delivered! And this summit showed once again that open-source robotics is advancing faster than anyone expects, driven by developers who show up ready to build!
This year, we brought nearly 200 developers, researchers, integrators, and industry partners together at the Omni Hotel in Centennial Park. Before the main program even opened, maintainers met to align roadmaps, identify pain points, and set priorities for the next cycle. Coordination was the core theme this year, and the outcome already shows in early planning for upcoming releases.
Then came two days packed with PX4 architecture talks, autonomy research, ROS 2 integration, GNSS and navigation tech, hardware platforms, middleware work, developer tools, and a pile of sessions that would have been impossible to fit into a multi track event. The single track format kept the entire community focused in the same room, which made discussions sharper and more collaborative. Partners brought serious work to Atlanta too. From computer vision to advanced autonomy to flight ready payload integrations, these demos made it clear that PX4 is not a hobbyist playground. It is a production grade stack for companies shipping robots today.
Below is a recap, plus photos, videos, and the traditional post-event highlight reel.
Watch the Talks
All talks are now available on the event schedule. We’re publishing recordings gradually to boost visibility on the PX4 YouTube channel, but you can access everything through the link below.
Photo Album
Browse the full gallery to see Atlanta in action, from hallway debates to live demos to the moments between sessions.
What You Missed
Here is the yearly video tradition. Short, sharp, and good enough to make anyone who skipped Atlanta reconsider their life choices.
Thank You to Our Sponsors
This event exists because sponsors believe in the value of open source robotics and are willing to back that belief with actual support. A sincere thank you to every company that helped us bring the summit to Atlanta.
Platinum
Silver
Ascend Engineering, CUAV, Firestorm, FlyingBasket, Holybro, ModalAI, RIIS, Roboto.AI, UVIFY
Your presence helped fund the venue, the AV team, the recording crew, the badges, the signage, and everything else that keeps the summit looking polished instead of improvised.
Media Partners
Thanks to our media partners for amplifying the message, covering the event, and helping new developers discover the PX4 ecosystem.
Autonomy Global, Commercial UAV News, Weekly Robotics
The Linux Foundation Events Team
A major shoutout to the LF Events crew. They handled registration, logistics, AV, speaker coordination, and a hundred quiet details that no one sees but everyone benefits from. They were flawless. If this event felt smooth, it is because they executed perfectly.
See You in 2026
If you missed Atlanta, don’t worry, 2026 gives you two chances to make it right. Next year the PX4 community joins the Open Source Summit events in North America in May and Europe in October. Bigger stage, bigger crowd, and a perfect excuse to block your calendar early. We’re bringing our developer focused energy to the wider Linux world, and it’s going to be a good time to show up, learn, share, and brag a little about what you’re building.
If you were in Atlanta, thank you for being part of it.
If you missed it, see you next time.
]]>

This year at ROSCon 2025 in Singapore, the Dronecode community was out in full force. From hands-on learning sessions to live demos and technical discussions, we showcased how PX4 and ROS 2 continue to grow closer together.
Hands-On Aerial Robotics Workshop






Our workshop “Hands-On Aerial Robotics with PX4 and ROS 2” was a full house with more than 60 participants completing all assignments successfully. Thanks to Patrik Dominik Pördi and Beniamino Pozzan for building and delivering the content, and to ARK Electronics for their partnership in making it happen. The session guided participants from simulation to full autonomy using PX4, ROS 2, Gazebo, and Foxglove.
Aerial Robotics Meetup



Later in the week, we hosted an Aerial Robotics Meetup that drew over 100 attendees. The four-hour event was packed with discussions, demos, and networking across the open robotics community. These conversations helped us align on upcoming collaborations, including deeper integration work with 03DE.
Showcasing Innovation Across the Ecosystem



ROSCon’s sponsor showcase featured several exciting PX4-powered demos. Benji Barash from Roboto AI demonstrated PX4 integrated with their analytics engine for physical AI. UVify presented their advanced Omega research platform, featuring the new Xeye visual odometry solution for ROS developers, with founder Hyon Lim and Robb Cheek leading the presentation. PX4 was also mentioned across multiple talks throughout the conference, underscoring its growing role in the broader ROS ecosystem.
PX4 Now in the ROS Distro
We also reached an important technical milestone: the first PX4 package was officially published to the ROS Rolling Ridley distribution, marking a major step toward easier integration between PX4 and ROS 2 for developers everywhere.
View the contribution on GitHub
Looking Ahead


We are already preparing to submit a new workshop proposal for ROSCon 2026 in Toronto (September 22 – 24). Our goal is to continue deepening collaboration with our sister ROS community and to make aerial robotics development even more accessible to researchers and engineers worldwide.
Open collaboration remains at the heart of everything we do. Thank you to everyone who joined us in Singapore and helped strengthen the bridge between PX4 and ROS 2
]]>
Dronecode is hosting a hands-on aerial robotics workshop at ROSCon Singapore on October 27. Tickets are still available, so there’s still time to join us.
Hands-On Aerial Robotics Using PX4 and ROS 2
Instructors: Ramón Roche (Dronecode Foundation), Patrik Pordi (ARK Electronics), and Beniamino Pozzan (PX4 Autopilot)
 Nicoll 1 Hall, Singapore
Nicoll 1 Hall, Singapore Full Day, 8:00 AM to 5:00 PM
Full Day, 8:00 AM to 5:00 PM
In this workshop, you’ll connect PX4 and ROS 2 in a complete simulation pipeline using Gazebo, RViz, and Foxglove. You’ll learn how to:
- Send velocity, position, and acceleration commands from ROS 2 nodes directly to PX4
- Integrate perception systems like ArUco markers and LiDAR
- Stream live telemetry and visualize flight data
- Build and run control routines on simulated or real drones
No PX4 experience is required. Bring your ROS 2 knowledge, your laptop, and your curiosity. You’ll leave with working simulation setups, example projects, and a clear path to move from virtual drones to real hardware.
All code, tools, and instructions are fully open source and available here:
 github.com/Dronecode/roscon-25-workshop
github.com/Dronecode/roscon-25-workshop
 Tickets for ROSCon and the workshop are still available—don’t miss your chance to join us in Singapore!
Tickets for ROSCon and the workshop are still available—don’t miss your chance to join us in Singapore!

Help Shape the Future of Simulation
With the help of Kimberly McGuire, an Independent Contractor, the Dronecode team is gathering feedback to improve drone simulation for the entire open source drone developer community. Whether you’re just getting started, a researcher working on autonomous flight, or an engineer developing commercial systems, your input can make a difference.
Closing the Simulation to Reality Gap
The simulation ecosystem is fragmented. Developers struggle with installation complexity, performance limitations, and the biggest problem of all, real-world tests invalidating your simulation results. This survey aims to identify the most pressing pain points, feature gaps, and current preferences, so Dronecode can prioritize improvements and integrations from PX4 to make the greatest impact.
Your responses will directly influence which simulator integrations get improved or added, what new features are developed, where documentation and examples are strengthened, and how simulation tools evolve to support diverse use cases, from single-drone prototyping to swarm simulation, from hobbyist projects to commercial development.
What We’re Asking
The survey takes 10-15 minutes and covers:
- Your background and current simulator usage
- Hardware constraints and technical setup
- Feature priorities
- Technical capabilities (physics, rendering, hardware-in-the-loop)
- Usability (installation, interface, debugging tools)
- Advanced functionality (multi-agent simulation, ML integration, custom models)
- Your biggest frustrations and desired improvements
Questions are designed to understand not just what tools you use, but how and why, from the number of vehicles you simulate to whether you need photorealistic rendering, or real-time execution
Share Your Perspective
Your answers will help build better tools for everyone in the PX4 ecosystem and beyond. Thank you for your participation!
]]>
The Dronecode Foundation is delighted to announce that Shenzen UTMTEK Technology Co., Ltd has joined as a Silver Member. With their innovative edge-computing flight controllers and comprehensive UAV management solutions, Utmtek’s commitment to open source development aligns perfectly with Dronecode’s mission to foster innovation.
Its USX51 Edge Computing Flight Controller system combines a D-Robotics X5 AI chip with a Pixhawk 6X flight controller architecture, delivering powerful onboard AI computing capabilities. This hardware demonstrates the extensibility of open hardware standards to provide cutting edge commercial products. Utmtek’s hardware and software platforms have been deployed various real-world domains including fire rescue, traffic management, law enforcement, and inspection.
“We build edge-computing flight control systems that bring together high-performance computing and autonomous flight, making drones and low-altitude applications smarter and more reliable. We believe innovation grows stronger through openness and collaboration, which is why we’re excited to join the Dronecode community. By sharing what we know and working closely with developers and partners around the world, we can help grow the open-source flight control ecosystem and push forward the next generation of intelligent aerial platforms. ” Utmtek CEO Ricky Yan
Utmtek’s expertise in edge computing and comprehensive UAV management represents a significant advancement for the drone industry, bringing industrial-grade reliability, domestic chip integration, and AI-powered autonomous capabilities to the open-source community. Their focus on building complete digital low-altitude ecosystems positions them among the top tier of UAV industry applications and services.
Utmtek’s expertise in edge computing and comprehensive UAV management represents a significant advancement for the drone industry, bringing industrial-grade reliability, domestic chip integration, and AI-powered autonomous capabilities to the open-source community. Its focus on building complete digital low-altitude ecosystems positions them among the top tier of domestic UAV industry applications and services.
]]>
The PX4 Developer Summit 2025’s program has dropped, and it’s packed with amazing speakers covering the most important topics in open source aerial robotics. This year’s lineup covers deep technical sessions on PX4 core development, MAVLink protocol advances, ROS 2 integration patterns, advanced simulation frameworks, computer vision and vision-based navigation, EKF2 estimation techniques, cutting-edge applications from F-16 simulation to warehouse autonomy, and more.
The summit program committee worked hard selecting the sessions from an overwhelmingly fantastic pool of submissions, so we thought we’d share a few of their favorites to give you a taste of what you can expect at the show!
Fuse, Reset, or Reject? Handling Various Data-sources in EKF2

This session dissects PX4’s estimation pipeline, exploring how EKF2 manages multi-sensor data fusion and the recent architectural shift toward “reset by fusion” over hard resets. Using GNSS-degraded scenarios as real-world examples, it demonstrates how the system handles everything from valid data to complete sensor failures, providing practical insights for configuring and extending EKF2’s capabilities.
Design MC Gains From First Principles Within the PX4 Architecture

This presentation covers a systematic approach to controller gain design that moves beyond iterative tuning to physics-based modeling. It explains how to linearize PX4’s rate-to-position controllers correctly and account for the architecture’s internal normalizations and transformations, providing a stronger starting point for tuning larger multi-copters where default gains are often suboptimal.
Fixed-wing Control API

A comprehensive deep-dive into PX4’s fixed-wing control architecture, mapping out where internal flight modes live and how they interface with the control pipeline. This session focuses on ROS 2 integration points, with practical examples and developer tips for creating custom external flight modes that seamlessly integrate with PX4’s core systems.
Taming the Wing: A Standardized Workflow for PX4 Fixed-Wing Tuning

This session unveils a systematic approach to fixed-wing tuning that transforms the traditionally complex process into a reproducible workflow. It presents a step-by-step methodology covering attitude controllers, TECS, NPFG, and airspeed configurations, while showcasing semi-automated tools that accelerate the tuning process.
PX4 Device Manifest

This presentation introduces a unified solution for device configuration management that addresses the current patchwork of opportunistic driver initialization and inconsistent parameter exposure. The approach promises backward-compatible parameter types with clear health feedback and runtime monitoring, eliminating silent failures in redundant sensor setups.
See you at the show!!!
This is just the tip of the iceberg of the great sessions you’ll find at the PX4 Developer Summit 2025, Atlanta, Georgia, November 10-11. If you haven’t already, register for your pass here. We can’t wait to see you there!
]]>
We had a great time at this year’s Open Source Summit Europe. It was inspiring to see the energy of the Linux community and to connect with so many of our members, partners, and friends.
The event was a success, and we were glad to see familiar faces as well as new ones joining the conversation. Thank you to everyone who attended our sessions, stopped by to chat, and continues to support open source autonomy.
We are already looking forward to the next opportunity to meet with the global open source community and share the progress being made in aerial robotics.
Dronecode contributed two talks to the program:
 *Keynote* Up Up and Away: Adventures in Aerial Robotics
*Keynote* Up Up and Away: Adventures in Aerial Robotics
Co-presented with Dr. Kimberly McGuire, this session explored how open source aerial robotics is shaping the future of autonomy and bringing developers together across disciplines.
Dronecode: A Decade of Open Source Autonomy
A look back at how far the PX4 and Pixhawk ecosystems have come, and where open collaboration is taking us next.

We’re excited to share that Dronecode will be at Open Source Summit Europe, happening August 25–27 in Amsterdam. This year, we’re bringing the story of open source autonomy to one of the biggest stages in open source.
Keynote:
Up, Up, and Away – Adventures in Aerial Robotics
 August 26, 10:10 am CEST
August 26, 10:10 am CEST
Ramón Roche, General Manager of the Dronecode Foundation
Kimberly McGuire, Independent Roboticist

Together, we’ll share how open source is powering the next generation of aerial robotics and why communities like PX4 and ROS are essential to making it happen.
Talk:
Dronecode – A Decade of Open Source Autonomy
August 26, 4:20 pm CEST
G102-G103 (Level 1)
Join me for a deep dive into the Dronecode story: how we started, what we’ve built together, and where we’re headed as we enter the next decade of open source autonomy.
More Robotics at OSS EU
The open source robotics community will be out in full force this year:
- An Opinionated Overview of Open Source Robotics – Mateusz Sadowski, Weekly Robotics
- Ask the Expert: Robotics – Kimberly McGuire
Don’t Miss These Co-Located Events
Open Source Summit EU is also home to some great co-located events:
- Yocto Project Developer Day – essential for anyone building Linux-based systems
- Zephyr Developer Summit – the hub for open source embedded development
Why It Matters
Dronecode is proud to represent the open source UAV community at OSS EU. These events show how drones and robotics are no longer niche, they’re central to the future of open systems, from research to industry.
If you’ll be in Amsterdam, come join us. Let’s talk about how open source autonomy is taking flight.
]]>
Hosted with our friends at NEROS in El Segundo, this joint Dronecode and ROS meetup brought together contributors working across autonomy, robotics, and aerospace. Over the course of the evening, we shared lightning talks, ran live flight demos inside a secure test cage, and met new collaborators from across Southern California.

Lightning Talks
Short and focused. Each talk ran about 15 minutes and aimed to share something concrete the audience could take home.
ROS Updates (Kat Scott, Developer Advocate for ROS)
A fast tour of what landed recently in ROS 2 and what is coming next. Kat also pointed folks to the right working groups, weekly ROS News, and where to start contributing.
Dronecode Updates (Ramón Roche, Linux Foundation)
A snapshot of what is new across the Dronecode stack and how to get involved. Highlights included recent PX4 releases, improvements in simulation and docs, and a reminder to submit talks for the PX4 Developer Summit in Atlanta this November.
Introducing Bagel: The Open Source AI Robotics Toolchain (Arun Venkatadri and Shouheng Yi)
Bagel lets you ask questions of your robot logs instead of writing one-off scripts. It already works with ROS 2 bags, ROS 1 bags, and PX4 ULogs, and can surface events like hard landings from IMU data. The team ran live queries and shared how to try it.
NEROS Technologies (Olaf Hichwa, CTO)
An inside look at NEROS and how they build, test, and iterate on autonomous systems in El Segundo. Olaf walked through the on-site test cage setup and invited attendees to connect about open roles.




Live Flight Demos
We wrapped talks with hands‑on demos in the NEROS test cage. Attendees saw PX4‑powered vehicles up close and had time for Q&A with the teams running the demos.

Thank You, NEROS
Big thanks to NEROS for hosting us in El Segundo and for sponsoring food and drinks. Events like this happen because local partners open their doors and share their space with the community.
Get Involved
Want to keep the momentum going? Join us in the Dronecode and ROS communities:
- Dronecode Foundation: https://dronecode.org/
- Dronecode Discord: https://chat.dronecode.org/
- PX4 Discussions: https://discuss.px4.io/
- OSRA: https://osralliance.org/
- OSRF Discord Server: https://discord.com/invite/RtJeHT8mXQ
- ROS Discussions: https://discourse.openrobotics.org
Looking Ahead
We are lining up the next set of meetups now. If your team wants to host or present, reach out to us. You can also keep an eye on our blog for upcoming dates.
PX4 Developer Summit
November 10-11, 2025, Atlanta, Georgia. Registration is open. Learn more and register: https://events.linuxfoundation.org/px4-developer-summit/
]]>
The Dronecode Foundation is thrilled to announce that the PX4 Developer Summit will return in 2025, this November 10-11 in Atlanta, Georgia, at the Omni Atlanta Hotel at Centennial Park. The two-day event brings together the top maintainers and contributors, community members and users, and innovative companies building on top of the PX4 ecosystem. Register today to lock in your spot at the premier event in aerial robotics development. Everyone is welcome!
It’s time to throw a big party again! Following a wave of 5 local meetups across the globe from Philadelphia to Korea, the PX4 Developers Summit stands as the Dronecode Foundation’s flagship event. Bringing together 200 international attendees, the event represents the best chance to meet the people behind the platforms and code pushing the boundaries of autonomous systems.
If you are involved in aerial robotics in any way, this event is for you. With unrivaled networking, you’ll interact with the best and brightest in the drone development community. It’s an unmatched opportunity to share knowledge and research, develop your career, find talent, or pair up with a future co-founder.
Meet the Industry Leaders
The PX4 Developers Summit is known for inviting legendary voices to keynote. You’ll hear from the visionaries leading the charge in aerial robotics and groundbreaking developers who have made it all possible.
Over the course of 2 Days, keynotes and sessions will dive into the innovations that are driving drone development and the core technologies that form the bedrock of the PX4 ecosystem, including PX4 Autopilot, Pixhawk, MAVLink, and QGroundControl, and it doesn’t stop there. The full program will include talks on ROS 2, simulation, AI, computer vision, and more.
Auterion, ModalAI, RIIS have already signed on to sponsor the event and lend their support to open source. Attendees will have access to the pillars of the drone industry to find their next career opportunity, source components, platforms, or services, and ask the questions you just can’t get answered online.
Looking to sponsor? Reach out to us here.
A Brand New Location
Taking place in the bustling city of Atlanta, Georgia, the PX4 Developer Summit will take place just as the weather cools down and the city settles into comfortable 70-degree days. Taking place next to Kubecon, the largest Linux Foundation event, the city will become a hub for open source developers all week long.
The summit will be hosted at the Omni Atlanta Hotel at Centennial Park, located at 190 Marietta Street NW in the heart of downtown Atlanta Venue & Travel | LF Events. Conveniently positioned just a short walk from the CNN Center and accessible via MARTA’s CNN/GWCC station, the venue offers attendees easy access to Atlanta’s vibrant downtown district Venue & Travel | LF Events. For those flying in, Hartsfield-Jackson Atlanta International Airport is approximately 30 minutes away by car or accessible via MARTA’s rail system for about $2.75 each way Venue & Travel | LF Events.
It’s Great to Be Back
If your memory is fading from the last summit or this is your first time hearing about it, check out some of videos from the 2023 event in Louisiana. We promise to put on as good a show this time, if not even better.

We are excited to announce our next community meetup taking place in Los Angeles, California, on July 31, 2025. Hosted in collaboration with Dronecode Member NEROS Technologies and OSRA, this event brings together developers and contributors from the ROS and PX4 communities for an evening of networking, demos, and lightning talks.
The meetup will be held at the NEROS headquarters in El Segundo, on the last day of the IEEE Space Mission IT conference. This is an excellent opportunity to connect with others working in robotics, aerospace, and open source software development.
The program features a series of short presentations highlighting recent work across both the ROS and PX4 ecosystems, accompanied by live demonstrations and ample time for informal discussions. Our host, NEROS, will provide food and drinks.
Whether you are local to Southern California or visiting for the conference, we invite you to join us and meet others who are building open-source solutions for robotics and autonomy.
Event Details
Date: July 31, 2025
Location: NEROS Technologies, El Segundo, CA
Time: 6:00 PM to 10:00 PM
RSVP: Register on Luma
We look forward to seeing you there.
]]>
The meetup held on July 8, 2025, in Guadalajara, Mexico, was a truly memorable event hosted by the always supportive NXP Semiconductor family. It brought together nearly 60 attendees in person from the Guadalajara metropolitan region, with developers from across Academia and Industry joining us for an evening of embedded talks with varying topics from RTOS to Flying Robots.




The event kicked off with networking fueled by snacks and drinks, but most importantly, project swag and cool demos featuring the open source projects on display, capturing the attention of everyone. This was followed by the welcome address and first talk by our speaker and host Ramón Roche.

Welcome Note & Zephyr: Open Source Project Best Practices Over Time – Ramón Roche, The Linux Foundation
This talk provided attendees with a comprehensive overview of the Zephyr project, highlighting its meteoric rise to the top due to its focus on best practices and safety. It showcased the Zephyr ecosystem and offered pathways for collaboration within the local community.

Getting started with Zephyr on NXP MCX microcontrollers – Missael Maciel, NXP Semiconductor
Missael demonstrated Zephyr in action with a live demonstration using an NXP board, and a comprehensive tutorial on the use of VSCode paired with NXP plugins for ease of use, showing developers how to make the most out of the predefined Devicetree configurations available for a given board.

After this, the group enjoyed a lively break, enjoying Pizza and drinks sponsored by our gracious host, NXP, while the next speaker set up on stage.

Dronecode: A Decade of Open Source Autonomy – Ramón Roche, The Linux Foundation
After the break, Ramón followed up with a detailed overview of the field of Aerial Robotics and the role of the Dronecode Foundation, stewarding innovation with open technologies, including a deep dive into the Dronecode stack, from firmware to hardware, flying by middleware, telemetry, and ground station apps.

QZPro: The game changer for fast and easy development – Alexis Guijarro and Leonardo Garcia, 3DR
Giveaway Quiz
The 3DR team showcased the newly released Zephyr & PX4-capable drone platform called the QZPro, featuring multiple microcontrollers and the OpenMV project exposing a MicroPython interface for extendability and highlighting the numerous benefits of using open source.

Thank you, NXP Semiconductor team!
We are especially grateful to the NXP Semiconductor team for hosting the event at their Guadalajara campus, for sponsoring the food and beverages, and for being a fantastic steward for open source collaboration in Mexico and beyond.
Looking Ahead
The Guadalajara meetup was a success on so many levels. The Mexican robotics community showed up in numbers to share their knowledge and show their support for the PX4 and Zephyr communities. As our first joint meetup, this proved that collaboration doesn’t only exist within a project, but multiple projects can work together to expand the possibilities for everyone.
Next Meetup
Join us for an exciting joint ROS / Dronecode Foundation meetup in Los Angeles! This special event, hosted by Kat Scott and Ramon Roche, will take place following the IEEE International Conference on Space Mission Challenges for Information Technology, on July 31, from 6:00 pm to 9:00 pm It’s an excellent chance to meet fellow developers, researchers, and enthusiasts while exploring the latest in robotics and unmanned systems. Whether you’re working on autonomous vehicles, aerial robotics, or cutting-edge ROS applications, you’ll find plenty of opportunities to learn, collaborate, and build meaningful connections.
]]>
The Dronecode Foundation is delighted to announce that Raefly has joined as a Silver Member. With its professional UAV technical expertise and extensive industry experience, Raefly’s commitment to advancing PX4 open-source UAV applications aligns perfectly with Dronecode’s mission to foster innovation within the global drone ecosystem.
Raefly brings impressive credentials to the Dronecode community, having provided UAV debugging and technical services for more than 2,000 UAV companies. The company specializes in UAV applications across surveying & mapping, inspection, and public security domains, accumulating extensive practical experience in the uncrewed systems industry. Through comprehensive services including UAS debugging and customized technical solutions, Raefly has established itself as a trusted partner in the UAV sector.
By joining Dronecode, Raefly will be able to leverage the collaborative power of the open-source community while bringing their technical expertise to benefit users worldwide.
“Joining Dronecode Foundation can significantly deepen our connection with open-source organization and expand our access to communicate with cutting-edge technology, which aligns with our long-standing goal,” says Lusen Liu, Co-founder of Raefly. “The PX4 ecosystem enables us to develop more innovative UAV application modes and enhance the user experience of UAVs. We are so excited to collaborate with Dronecode to advance the uncrewed systems industry. We will make every effort to explore new operation functions and potential application scenarios for UAVs.”
With their proven track record of serving thousands of UAV companies, Raefly’s technical expertise in debugging and customized solutions will strengthen the PX4 ecosystem and support the broader community’s innovation efforts.
We warmly welcome Raefly to the Dronecode Foundation and eagerly anticipate their impactful contributions and innovations.
]]>
We’re thrilled to announce the next stop in the Dronecode Foundation’s community meetup series. This time, we’re teaming up with the ELISA Project for a one-day, in-person event at Korea Aerospace University. The focus? Safety-critical Linux and autonomous flight software, with a strong emphasis on PX4 and the growing interest in certifiable open-source flight stacks.
This meetup is a great opportunity to connect with local developers, researchers, and industry partners who are working on the cutting edge of aerial robotics and space-grade systems. The program will dive into how PX4 is being integrated into safety-critical workflows and the role of Linux in enabling robust, certifiable platforms across domains. The day will start with a single-track format covering shared challenges and tooling from the ELISA Project, including the ongoing work in the Space Grade Linux (SGL) initiative. After lunch, the program will split into two focused tracks on practical applications of PX4 in autonomous flight.
If you’re interested in contributing to the conversation, we’d love to hear from you. The call for proposals is now open, and we encourage anyone building with PX4 or working on safety-critical Linux to submit a talk. The deadline to submit is October 24, 2025, at 11:55 PM local time. Registration for the event is now open as well—seats are limited, so be sure to sign up early.
As always, this meetup is organized by the community with support from both the Dronecode Foundation and the ELISA Project. If you have any questions, feel free to reach out to [email protected]. We’re looking forward to seeing the PX4 community show up strong in Korea.
]]>
By Fernando Cladera and Mike Pehel
Every year the PX4 ecosystem sees milestone advancements in research. This research provides a foundation for the real-world applications that expand the capabilities of autonomous platforms. We wanted to share some exceptional papers we found to help inspire you and bring to light some of the possibilities in the world of PX4.
OmniNxt: A Fully Open-source and Compact Aerial Robot with Omnidirectional Visual Perception
Peize Liu et al, HKUST Aerial Robotics Group, The Hong Kong University of Science and Technology

It’s always exciting to see a full-fledged open source drone platform in a paper. Here, the researchers showcase a multi-fisheye camera setup utilizing a Jetson Orin NX capable of omni-directional perception. This low SWaP setup is capable of indoor navigation in cluttered indoor environments at speeds up to 1.0 m/s while avoiding obstacles.

The paper also claims the platform demonstrates superior VIO accuracy compared to limited-FoV stereo systems. Notably, the omnidirectional perception allows the drone to fly without yaw rotation for trajectory following, which improves both localization accuracy and energy efficiency. The project makes omnidirectional perception more accessible to the broader research community through complete open-source hardware and software and we’re excited to see what the team does next.
A Neural Network Mode for PX4 on Embedded Flight Controllers
Sindre M. Hegre et al, Autonomous Robots Lab, Norwegian University of Science and Technology

This paper presents a significant advancement by creating a neural flight controller for PX4. The key innovation is developing a custom module that enables TensorFlow Lite neural networks to run directly on embedded microcontrollers (like the STM32H743), completely replacing the traditional cascaded PID control system with an end-to-end neural controller that directly outputs motor commands.
The system as described by the paper demonstrates remarkable efficiency with inference, showing successful simulation-to-reality transfer while preserving PX4’s safety features. Flight controllers are extremely resource constrained compared to the devices neural networks (and other AIs) usually run on, so this progress is noteworthy, especially considering it was achieved without the need for a companion computer to offload processing.
Trajectory Planning and Control for Differentially Flat Fixed-Wing Aerial Systems
Luca Morando et al, The agile robotics and perception lab, New York University

Presented at the ICRA 25 Aerial Robotics Workshop and main conference track, this paper introduces a novel approach to fixed-wing navigation using differential flatness and Bernstein polynomials similarl to “minimum snap” method widely used in quadrotors. The implementation is dynamic and adapts to the curved trajectory constraints of the aircraft while adhering to the optimal path. This could potentially enable aggressive flight paths for fixed-wing platforms and enhanced maneuverability overall.
Beyond the practical results, the methodology behind the research can also lead to faster deployments. They trained their system in Gazebo and the results show a very close sim-to-real gap. This assures a smoother transition when moving out of the simulator and into the real world.
Dynamic End Effector Trajectory Tracking for Small-Scale Underwater Vehicle-Manipulator Systems (UVMS): Modeling, Control, and Experimental Validation
Niklas Trekel et al, Institute of Mechanics and Ocean Engineering, TU Hamburg
Sometimes it seems like the UAVs get all the attention, but PX4 also gets utilized in AUVs in maritime environments. This research showcases improved trajectory tracking for underwater vehicle-manipulator systems (UVMSs) on the BlueROV2 platform from our friends over at BlueRobotics. Even small disturbances can significantly impact the operation of manipulators or really any moving part of the AUV, so to see such buttery smooth motion from on the arm in this video is impressive. This represents important progress in making underwater manipulation more accessible through commercial, lightweight platforms rather than requiring expensive, large-scale research vessels.
Looking Forward
What makes this wave of research particularly exciting is its commitment to open-source accessibility, ensuring these cutting-edge capabilities reach the widest audience possible, and pushing the limits of what PX4 controllers can do.This is just a small slice of the great work being done, so feel free to share with us other interesting research or your own projects on social media or in the Dronecode Discord channel. If we get enough feedback, we’ll be sure to highlight ongoing research more often!
]]>
The Dronecode Foundation is excited to team up with the Zephyr Project for our first-ever joint meetup in Mexico, taking place in Guadalajara on July 8th at the NXP Offices. This is a fantastic opportunity for developers, contributors, and users of both ecosystems to connect in person, share their work, and explore how open source is driving innovation in drones and embedded systems.
We are actively looking for speakers—if you’ve been working on something cool with PX4, Pixhawk, Zephyr RTOS, or related technologies, we want to hear from you! Submit your proposal via the CFP form. And whether you want to present or simply attend and network, be sure to register here —space is limited.
I’ll be attending the meetup in person and look forward to connecting with the local community. If you’re in the area, come by and say hi—it will be a great evening of tech talks, collaboration, and tacos. See you in Guadalajara!
]]>
The Northeast Meeup, held on March 26th at University of Pennsylvania Pennovation Works gathered the PX4 community, roboticists, engineers, students and researchers for a day packed with in-depth technical presentations and unrivaled networking. The event established new connections for the local PX4 contributors and reaffirmed longstanding relationships in the open source community.
Event Overview

Expanding on the schedule from our previous meetup, the East Coast edition featured a giant lineup of legendary speakers. It covered everything from groundbreaking research to advanced real-world applications that exemplify the power of PX4. Here’s a recap of the sessions:
Deep Dive into the PX4 Autopilot (10:00 AM)
Ramon Roche, General Manager of the Dronecode Foundation, kicked off the technical sessions with an in-depth exploration of the PX4 Autopilot. He emphasized the importance of collaboration and open standards in driving innovation in the drone industry. Ramon’s talk highlighted how the PX4 community continues to push the boundaries of autonomous flight and how attendees could get involved in shaping the future of open-source drone technology.
10 Years of PX4 at GRASP – An Overview (10:30 AM)
Fernando Cladera, PhD Student at GRASP Lab, UPenn, presented a comprehensive overview of the decade-long journey of PX4 at the GRASP Lab. Fernando’s presentation provided historical context and showcased the evolution of PX4 technology within the academic research environment at UPenn.
Wildland Fire Management and Avalanche Mitigation with Drones (11:00 AM)
Max Tubmann, Director of Integrations at Drone Amplified, delivered a compelling talk on practical applications of drone technology in emergency response scenarios. Max discussed innovative approaches to wildland fire management and avalanche mitigation, demonstrating how drones are transforming these critical safety operations.
Deploying QGC in a SteamDeck (11:30 AM)
Conor McCaffey, CEO of UAX Technologies, shared insights on the novel implementation of QGroundControl in the Steam Deck platform. Conor’s presentation showcased the versatility of modern drone control systems and the potential for consumer gaming hardware to serve professional drone applications.
Lunch & Networking (12:00 PM)
Attendees enjoyed a lunch break that provided an excellent opportunity to connect and exchange ideas before the afternoon sessions.
Using Simulation to Develop Real-World Robotic Intelligence (12:45 PM)

Parv Kapoor, PhD Student at CMU and Research Intern at Scaled Foundations, discussed the critical role of simulation in developing robust robotic intelligence. Parv’s talk emphasized how simulation environments accelerate development cycles and enable safer testing of advanced drone capabilities.
Towards Safe and Efficient Real-Time Motion Planning in Windy Urban Environments (1:15 PM)
Spencer Folk, PhD Candidate at GRASP Lab, UPenn, presented cutting-edge research on motion planning for drones operating in challenging urban wind conditions. Spencer explained how sophisticated algorithms can enhance drone navigation safety and efficiency in complex environments.
Real-Time Image Stabilization Using VOXL 2 AI Autopilot (2:15 PM)
Alex Kushleyev, Technical Advisor at ModalAI, delivered a technical deep dive on real-time image stabilization technologies. Alex discussed how the VOXL 2 AI Autopilot enables superior image quality in dynamic flight conditions, opening new possibilities for aerial imaging and data collection.
Live Demonstrations & Hands-on Activities (2:45 PM)

The formal presentations concluded with an exciting session of live demonstrations at the Pennovation outdoor net, where attendees witnessed heavy-duty drone and satellite navigated drone flights.
Extended Networking Session (3:30 PM)
The event wrapped up with an extended networking session, providing attendees additional opportunities to engage with speakers, fellow enthusiasts, and industry professionals over refreshments.
Community Engagement and Collaboration
The Northeast Meetup exceeded expectations in fostering meaningful dialogue among participants. Throughout the day, the Treehouse buzzed with energy as seasoned professionals exchanged insights with curious newcomers. Technical discussions spilled over from formal sessions into animated group conversations, where attendees freely shared challenges from their own projects and received immediate feedback from peers. This organic knowledge exchange exemplified the collaborative spirit that makes the PX4 ecosystem thrive and demonstrated how regional gatherings can strengthen the broader open-source movement.
Acknowledgments

A special note of gratitude goes to the University of Pennsylvania Pennovation Works for providing their exceptional Treehouse space for our gathering. This world-class innovation hub proved to be the perfect setting for a day dedicated to cutting-edge discussions and demonstrations. The venue’s support team went above and beyond to ensure everything ran smoothly from setup to conclusion.
We’d also like to personally thank Vijay Kumar Nemirovsky Family Dean, SEAS, and Fernando Cladera, Robotics MSE ’19; PhD, CIS, for their hands on work to make this event possible and coordinating all the stakeholders at UPenn. Their ongoing support of the PX4 community is exemplary.
We’re deeply indebted to our remarkable roster of speakers who traveled from across the country to share their expertise with the Philadelphia community. Their willingness to engage with attendees long after their sessions had ended highlighted the genuine passion that drives our industry forward.
Looking Ahead
The Philadelphia Meetup was proof of the region’s strong influence in driving the industry forward. We look forward to seeing you at a meetup in the future. If you’d like to host your own, let us know in the Dronecode Discord server! We’re happy to help you get started.
]]>
The Dronecode Foundation is delighted to announce that Nanoradar has joined as a Silver Member. Known for its innovative millimeter wave radar technology, Nanoradar’s commitment to open-source development aligns perfectly with Dronecode’s mission to foster innovation within the global PX4 ecosystem.
Nanoradar specializes in high-quality millimeter wave radar products that provide advanced obstacle avoidance and altitude measurement capabilities for civilian UAV applications. With a strong focus on precision measurement and intelligent perception, Nanoradar has successfully developed robust solutions such as the MR72 obstacle avoidance series and the NRA24/NRA15 fixed-height radar products. These solutions cater primarily to industries including agricultural plant protection, surveying and mapping, and industrial inspection.
By integrating Nanoradar’s technology into the PX4 open-source flight control platform, developers and users will benefit from enhanced sensing capabilities, enabling more efficient, stable, and cost-effective UAV operations. Nanoradar’s expertise will significantly enrich the PX4 ecosystem, providing users globally with reliable and accessible radar-based solutions.
“Joining the Dronecode Foundation as a Silver Member underscores our commitment to advancing open-source drone technology. PX4’s robust and diverse ecosystem allows Nanoradar’s innovative millimeter wave radar products to rapidly integrate, enhancing obstacle avoidance and altitude measurement for UAV users worldwide. We are excited about collaborating closely with the community to drive further innovations in unmanned aerial sensing.” — Mr. Li, Nanoradar
We warmly welcome Nanoradar and eagerly anticipate the impactful contributions and innovations that will arise from this partnership.
]]>
We are thrilled to welcome Zebu Intelligent Systems to the Dronecode Foundation as our newest Silver member. Its work on autonomy, swarm intelligence, and ground control software, make them a perfect addition to our growing community of drone technology innovators.
Founded with a mission to deliver transformative impact across industries and domains, Zebu Intelligent Systems specializes in seamlessly integrating hardware and software to create robust and adaptive systems that can meet the demands of complex missions and tasks. Their product portfolio includes cutting edge solutions like long-endurance UAVs, swarms-based systems, and multi-utility multicopters.
“Joining the Dronecode Foundation aligns with our commitment to advancing drone technology through collaboration and innovation,” said Santosh Balajee Banisetty, Founder of Zebu Intelligent Systems. “Open-source platforms accelerate progress, and we’re excited to contribute our expertise to strengthen the ecosystem. Together, we can drive the future of autonomous systems and unlock new possibilities in aerial solutions.”
Zebu enables drones to operate independently with great precision by leveraging its expertise in areas like artificial intelligence, swarms, autonomous navigation, and propulsion. Its focus on collaboration to support the strength and growth of open source ecosystems resonates with Dronecode’s core values.
The Dronecode Foundation enthusiastically welcomes Zebu Intelligent Systems and looks forward to their contributions in shaping the future of autonomous aerial robotics.
]]>
The Dronecode Foundation is thrilled to announce that Firestorm will be joining as a Silver Member. Firestorm is establishing itself as an innovative manufacturer, and its addition to the Dronecode membership marks a milestone in advancing uncrewed aerial systems design.
Firestorm produces mission-adaptable aerial vehicles and distributed manufacturing solutions. Its approach can significantly reduce the total cost of ownership while dramatically increasing production speed and flexibility. The company’s flagship product, the Tempest drone, exemplifies its commitment to modular, open-system approaches that allow for rapid deployment and mission customization. Its OCTRA flight controller and mission computer supports advanced capabilities, such as increasingly important use cases like GPS-denied navigation.
“The future of UAS technology will rely on open architectures and flexible integration capabilities,” says Ian Muceus, Co-Founder, Lead Inventor, and CTO at Firestorm. “Joining the Dronecode Foundation aligns perfectly with our vision of creating mission-adaptable platforms that can be rapidly manufactured. The PX4 ecosystem provides an ideal foundation, enabling us to deliver solutions that empower our clients in the field.”
The company’s commitment to open-system software and hardware approaches aligns perfectly with Dronecode’s mission of advancing drone technology through open-source collaboration. Their OCTRA system, which is built on open architecture principles, promises to enhance the capabilities of the PX4 ecosystem while providing new opportunities for integration and customization.
We welcome Firestorm to the Dronecode Foundation and look forward to seeing them lend their innovative mindset to the PX4 ecosystem!
]]>
The South California Meetup, held on February 19th in San Diego, California, brought together drone enthusiasts, industry professionals, and open-source advocates for an afternoon of insightful presentations and networking. Sponsored by Dronecode and Firestorm, the event showcased the latest advancements in drone technology and fostered meaningful connections within the community.
Event Overview
The meetup featured a stellar lineup of speakers who shared their expertise on everything from open-source ecosystems to cutting-edge hardware innovations. Here’s a recap of the sessions:
Opening and Networking (3:00 pm PST)
The event began with a warm welcome and networking session, allowing attendees to connect and exchange ideas before the presentations kicked off.

Dronecode: The Latest on PX4 and the Open Ecosystem (3:30 pm PST)
Ramon Roche, General Manager of the Dronecode Foundation, opened the technical sessions with an update on PX4 and the open-source ecosystem. He emphasized the importance of collaboration and open standards in driving innovation in the drone industry. Ramon’s talk highlighted how the PX4 community continues to push the boundaries of autonomous flight and how attendees can get involved in shaping the future of open-source drone technology.
Meet Firestorm (4:00 pm PST)
Ian Muceus, CTO of Firestorm, took the stage to introduce Firestorm’s mission and projects. Ian’s presentation focused on the company’s efforts to develop scalable and efficient drone solutions for various applications, from logistics to disaster response. He also shared insights into Firestorm’s approach to integrating advanced technologies into their platforms.

Hardware Accelerated Image Pipeline for Multi-Cam VIO (4:30 pm PST)
James Strawson, Director of Software at ModaIAI, delivered a fascinating talk on hardware-accelerated image pipelines for multi-camera visual-inertial odometry (VIO). James explained how leveraging hardware acceleration can significantly enhance the performance of drone navigation systems, enabling more precise and reliable operations in complex environments.

High Altitude Anti-icing Quadrotor (5:00 pm PST)
Jackson Shultz (Head of Engineering) and Jordan McMillan (Chief Engineer for UAS) from Rainmaker presented their groundbreaking work on high-altitude anti-icing quadrotors. They discussed the unique challenges of operating drones in extreme weather conditions and shared innovative solutions to prevent icing, ensuring reliable performance at high altitudes.


Closing Remarks and Networking Hour (5:30 pm – 7:00 pm PST)
The formal sessions concluded with closing remarks summarizing the key takeaways from the day. The event wrapped up with an extended networking hour, where attendees had the opportunity to engage with speakers, sponsors, and fellow enthusiasts over refreshments.
Community Engagement and Collaboration
One of the highlights of the meetup was the vibrant discussions and connections formed during the networking sessions. Attendees had the chance to share their experiences, ask questions, and explore potential collaborations. The event underscored the importance of community-driven innovation and the role of open-source projects in advancing the drone industry.



Acknowledgments
We extend our thanks to our sponsor and host, Firestorm, for their unwavering support in making this event possible. Their commitment to fostering innovation and collaboration is truly commendable. We also want to thank our speakers for sharing their knowledge and inspiring the community with their groundbreaking work.
Finally, a big thank you to everyone who attended the meetup. Your enthusiasm and participation made the event a resounding success.
Looking Ahead
The South California Meetup was proof of the power of the region on driving the industry forward. As we reflect on the success of this event, we are already looking forward to future meetups and opportunities to bring the community together.
Next Meetup
Join us for an exciting community meetup in Philadelphia! This event will take place on March 26, 2025, at the UPenn Pennovation Works Treehouse. This is a great opportunity to connect with fellow enthusiasts, share knowledge, and network with like-minded individuals in the tech and open-source communities. Stay tuned for more details, including the agenda and featured speakers, as we get closer to the date. Don’t miss out on this chance to engage with the community and enjoy some refreshments while you’re at it!


We are excited to announce that Ascend Engineering has joined the Dronecode Foundation as a Silver member, bringing its expertise in custom drone integration services to the PX4 community.
Ascend Engineering is a leading provider of specialized drone solutions, offering a range of services including sensor and camera integration, software engineering, companion computer integration, communications integration, and QGC customization. Ascend’s experience with the core PX4 ecosystem projects positions them as a welcome addition to the Dronecode membership.
The Ascend Engineering team will lend this wealth of expertise and contribute its Flight Testing operations for the upstream PX4 and QGroundControl projects in coordination with the PX4 & QGC maintainer teams. The testing will directly improve the upcoming PX4 v1.16 and QGC v5.0 releases and is a welcome addition to the community resources.
“Ascend Engineering joined Dronecode to help companies develop PX4, QGroundControl, and MAVLink-based projects while contributing back to open source. As we explored how to make the biggest impact, flight testing emerged as the best way to validate new changes and updates to the PX4 and QGroundControl codebases, ensuring they are tested in real-world conditions before reaching the market.”
Andrew Wilkins, co-founder of Ascend Engineering
Ascend Engineering’s skill set and commitment to real-world testing will be invaluable to the PX4 community. We warmly welcome Ascend Engineering to the Dronecode Foundation and look forward to the innovative contributions they will bring to open source drone technologies.
]]>
Dronecode and the broader Linux Foundation community were thrilled to participate in FOSDEM 2025, joining thousands of open-source developers in Brussels for a weekend fueled by a shared passion for open technology. For those who haven’t experienced FOSDEM, it’s hard to capture the unique energy of this open, inclusive, and registration-free event; you really have to experience it yourself. Picture developers enthusiastically moving between buildings at the Université libre de Bruxelles, diving into talks and connecting over their love for innovation. It’s a one-of-a-kind gathering that truly embodies the spirit of open-source collaboration.
“This is my first time at FOSDEM, and I came mainly because my friends dragged me along—though people have been recommending it to me for years. After experiencing the first day, I can see why. FOSDEM is incredible because it brings together so many people who are deeply passionate about open-source software and sharing what they create. The idea that anyone can inspect, adapt, and build on the code is powerful, and it’s amazing to have a place where this community can come together.” said Roland Merteens, Robotics Engineer, and first time participant. “I also discovered some cool projects I hadn’t seen before, like someone running JavaScript on microcontrollers. It sounds a bit wild, but it’s fascinating because it lowers the barrier for people getting started with microcontrollers. Overall, FOSDEM has been a great experience, and I’m glad I finally made it!”
Exhibits from Sponsors

One of the standout surprises was the bustling exhibit area, where the halls were packed with attendees eagerly engaging with exhibitors showcasing some of the most prominent projects and foundations in the ecosystem. It was nearly impossible to walk through without getting caught in the excitement! The FOSDEM community clearly embraced the swag culture, proudly sporting T-shirts and stickers collected from various booths. A particular crowd favorite was the Linux Foundation Europe booth, which drew a constant stream of visitors with its array of merchandise from top CNCF projects and exclusive discounts on training and certifications available only to FOSDEM attendees. The energy and enthusiasm around the exhibits were a testament to the vibrant spirit of the event.
Embedded, Mobile, and Automotive
The Embedded, Mobile, and Automotive devroom at FOSDEM 2025 was a hub of innovation, bringing together a vibrant community of developers and enthusiasts to explore the latest in open-source technologies. The program was packed with engaging talks, covering everything from CubeSat communication systems and general-purpose humanoid robotics with dora-rs to dual A/B update solutions for embedded Linux. Standout sessions included Thibault Poncelet’s deep dive into automotive communication systems with Reverse Engineering CAN Communication and Building ECUs Using Elixir and the BEAM, and Florian Limberger’s exploration of Bluetooth Low Energy applications in Developing BLE Host Applications with Zephyr. Attendees also got a closer look at the integration of MicroPython in embedded systems and enjoyed a lively update on the Zephyr RTOS during its dedicated roasting party. With a full house for nearly every session, the devroom highlighted the rapid advancements in embedded technologies and the critical role of open-source collaboration in shaping the future of the industry.
“FOSDEM is one of the most important open-source gatherings in the world, and this year was no exception,” said Walt Miner, AGL Community Manager at the Linux Foundation, devroom co-chair. “I came to host the Embedded, Mobile, and Automotive devroom, as well as the Automotive BoF, but it’s also the best place to connect with a wide variety of experts across countless projects. What makes FOSDEM so special is its diversity—it’s not tied to a single project or technology, and every year brings new devrooms and discoveries. This year, I was excited to learn more about OpenPilot and meet some of the people using it.”
Miner continued, “In the Embedded, Mobile, and Automotive devroom, Zephyr was a recurring theme, with so many great talks that we could easily justify a dedicated Zephyr devroom next year. The devroom was a huge success—our 210-seat room was packed for every session, and we had three times more talk submissions than we could accommodate. It’s inspiring to see such enthusiasm and expertise in the community, and I’m already looking forward to next year!”
Robotics and Simulation

The 2025 edition of FOSDEM marked a significant milestone for the robotics community by introducing its first dedicated Robotics devroom. This exciting addition brought together over a hundred developers, offering a program filled with insightful and educational content on some of the most impactful open-source projects in robotics. A central theme throughout the devroom was the Robot Operating System (ROS), with many featured projects showcasing compatibility with this widely adopted platform. The aerial robotics space was also well-represented, featuring two standout talks: “Ardupilot: Trusted, Versatile, and FOSS Autopilot for All and Everything” by Pierre Kancir and “Build, Launch, and Soar with Dronecode: The Infrastructure Ecosystem for Aerial Robotics Development.” Additionally, Jan Hanca’s talk, “O3DE: Creating Realistic Simulations with Open-Source Game Engine,” highlighted the growing intersection of robotics and simulation, demonstrating how open-source tools like O3DE can be leveraged to create highly realistic and scalable robotic simulations.
“FOSDEM is a great conference with a different vibe that fits well with the open source community. It’s free, held on a weekend, and accessible even on a limited budget. It’s a fantastic place to catch up with others in the community and connect with developers behind your favorite open source projects.” — Marcus Eliasson, Co-Founder of Bitcraze
The success of this year’s Robotics devroom has set the stage for an even more significant return in 2026. We’re already looking forward to coming back and hope to see the robotics community grow even stronger, with more developers, projects, and groundbreaking ideas taking the spotlight.
“I learned about FOSDEM one or two years ago from some folks on our Weekly Robotics slack, and instantly had a huge FOMO. FOSDEM is a truly open-source conference that does not discriminate, with a retro-hacker vibe that makes you feel like everything is possible. I loved that we had some robotics rockstars present in our devroom, and the fact that we managed to cover different technologies during the event. I hope we can bring more robots to the room next years.” Mateusz Sadowski — Founder Weekly Robotics, Robotics and Simulation Devroom Co-Chair.
Videos from Dronecode’s Talks
Both talks from Dronecode’s participation at FOSDEM 2025 are now available on the PX4 YouTube channel.
Build, Launch, and Soar with Dronecode, The Infrastructure Ecosystem for the Development of Autonomous Aerial Robotics
In this session, Ramón Roche, General Manager of the Dronecode Foundation, provided a rapidfire rundown of the Dronecode ecosystem of projects and their history. Watch to learn important statistics about the projects like their 30,000 contributors and 60 million lines of code as well as to get a breakdown of each of the projects including PX4 (flight control software), Pixhawk (open hardware standard), and MAVLink (messaging protocol).
Link to Session description and Slides on FOSDEM 25 website.
Infra for Drones: Lessons Learned from 15 Years of Open Source Robotics
In this talk, Roche brought attendees through the Dronecode Foundation’s journey in open source drone development and testing infrastructure. Since 2009, the project has grown to supporting over a million vehicles across 80+ board variants. This presents obvious challenges and Roche walks through how Dronecode works to address each of them, including tactics like grouping manufacturers and reducing integration test times among many others. Give this video a watch to learn more about the challenges of robotics testing and the impact community support like yours can enhance a project’s testing infrastructure.
Link to Session description and Slides on FOSDEM 25 website.
]]>
Are you heading to Brussels for FOSDEM 2025, February 1-2? We hope to see you there to hang out at one of the largest free-to-attend open source events in the world.
The Dronecode Foundation is proud to share its expertise at FOSDEM 2025 with two scheduled talks showcasing the latest developments in open source drone technology and aerial robotics software. It’s a great honor to be recognized for our contributions to open source with our acceptance to the program.
Dronecode Talks at FOSDEM 2025
Build, Launch, and Soar with Dronecode
Track: Robotics and Simulation
Room: UB2.147
Day: Sunday, Feb 2, 2025
Time: 16:45 – 16:50
This comprehensive overview will introduce attendees to the Dronecode ecosystem, with a special focus on PX4 Autopilot and Pixhawk. You’ll learn how our projects have evolved from DIY foundations to supporting a mature industry that serves thousands of developers and companies worldwide. The talk will include a unique behind-the-scenes look at our maintainer team and provide guidance on how you can contribute to these exciting projects.
Infra for Drones: Lessons Learned from 15 Years of Open Source Robotics
Track: Testing and Continuous Delivery
Room: UD6.215
Day: Saturday, Feb 1, 2025
Time: 17:30 – 17:55
This talk offers a candid look at the challenges and solutions in maintaining infrastructure for a complex robotics project. You’ll hear about our journey with continuous integration, including the transition from Jenkins to GitHub Actions, managing hardware-in-the-loop testing, and supporting our growing community of contributors. It’s a must-attend session for anyone interested in the operational aspects of large-scale open-source robotics projects.
Can’t Miss Social Event
Also, the Linux Foundation will be hosting a get together that we can connect at!
Date: February 1st, 2025
Time: 6:00 – 8:00 pm
Location: Au Bassin, Quai Aux Briques 74, Brussels
Note: Free attendance but registration is required
This is an excellent opportunity to connect with maintainers, contributors, and fellow drone enthusiasts in a relaxed setting. You’ll have the chance to discuss everything from PX4 development to the future of autonomous aerial robotics.
Looking Forward to Meeting You
Whether you’re an experienced drone developer and have been part of the PX4 community for years or are simply curious about open source aerial robotics, we’d love to connect at FOSDEM 2025. Ramon Roche, General Manager at Dronecode will be available to answer your questions about PX4, Pixhawk, and the rest of the Dronecode ecosystem of projects. Which aspects of open-source drone development interest you most? Are you building something exciting with PX4? We’d love to hear about it when we meet at FOSDEM 2025!
]]>
In the world of aerial robotics, progress isn’t measured by individual breakthroughs but by the collective advancement of an entire ecosystem. The Pixhawk open standards exemplify this philosophy. When hardware manufacturers, software developers, and drone engineers align around common standards, we create something more valuable than any single proprietary solution – we create possibilities.
Introducing the Pixhawk FMUv6X-RT Standard
Today, we’re excited to announce the release of the Pixhawk FMUv6X-RT standard, building upon the success of the FMUv6X platform while introducing powerful new capabilities for real-time applications. At the heart of this new standard is the NXP IMX RT1176 processor, bringing enhanced processing power and real-time performance to the Pixhawk ecosystem.
The FMUv6X-RT standard emerges from the collaborative efforts of the Pixhawk Special Interest Group hosted by the Dronecode Foundation, developed through extensive discussions and technical workshops during our FMU Workgroup meetings. This latest advancement in the Pixhawk Open Standards family represents months of careful planning and engineering from our community of experts. Like all our standards, development participation remains open to all Dronecode Foundation members, ensuring diverse perspectives from across the industry shape our technology.
Community Collaboration
Dronecode members and partners collaborated to bring together the DS-020 standard, with Dronecode member NXP leading the effort.
“The new V6X-RT standard represents an exciting addition to the Pixhawk Ecosystem. By including the NXP MCIMXRT1176 and other i.MX RT family parts, this opens the path for multi core and GHz compute speed while also significantly easing memory constraints and enhancing features with improved interface robustness and hardware-backed security. Other additions include CAN-FD with Signal Improvement CAN (SIC) as well as introducing 100Base-T1 two wire Ethernet capability. The ecosystem including Holybro and Agam have already produced commercial offerings, and we are very much looking forward to seeing additional commercial derivatives of the published reference design MR-VMU-RT1176.”
Iain Galloway, Mobile Robotics Domain Lead, Drones and Rovers, NXP Semiconductors
Key Features of FMUv6X-RT
The FMUv6X-RT represents a significant advancement in drone flight controller technology, offering:
- The first NXP-based MCU on a Pixhawk: IMX RT1176
- Secure Operations: Integrated secure element (SE051) for secure authentication
- High-Speed Connectivity: Ethernet interface for advanced mission computer integration
- Triple Redundancy: Completely isolated sensor domains with separate buses and power control
- Advanced Sensor Suite:
- Redundant IMUs including Bosch BMI088, TDK ICM-42688-P, and ICM-42686-P
- Bosch BMM150 compass
- Bosch BMP390 pressure sensors
- Dual GPS with external magnetometer and barometer support
- High-accuracy barometric sensor
- Calibration EEPROM for both baseboard and high-accuracy sensors
Technical Innovations
At the technical level, the shift from the STM32H7 to the NXP IMX RT1176 processor increases the options available in the Pixhawk ecosystem by introducing a new level of real-time computing capability. This transition is accompanied by an upgrade to the memory interface, moving from standard SPI to FLEXSPI2 for FRAM access, which provides enhanced data throughput for configuration and parameter storage. The pin assignments have been extended to take advantage of the RT1176’s expanded I/O capabilities, though care has been taken to ensure that the core Pixhawk interfaces remain consistent with existing implementations.

Standards Access
The FMUv6X-RT standard documentation is now available for everyone to download from the Pixhawk GitHub repository.
- DS-020 Pixhawk FMUv6X-RT (PDF)
- All Pixhawk FMUv6 Open Standards on GitHub
- Additional 6th Generation Pixhawk Standards
- DS-012 Pixhawk FMUv6X (PDF)
- DS-018 Pixhawk FMUv6C (PDF)
Commercial Offerings
Some commercial offerings are available for developers and users looking for an FMUv6X-RT implementation for purchase.
- Holybro Pixhawk 6x-RT (Official Pixhawk®)
- Agam Autopilot v6X-RT
- multiple implementations currently in the works.
Join the Ecosystem
Are you interested in building products using any Open Source technologies hosted by Dronecode? Here’s how to get started:
- Join the Droneode Foundation Discord channel
- Participate in the weekly coordination calls.
- Consider becoming a Dronecode Foundation member.
The FMUv6X-RT standard represents a significant step forward in flight controller technology. It offers enhanced real-time capabilities while maintaining the open, collaborative spirit that has made Pixhawk the de facto standard in drone flight controllers. We look forward to seeing the innovations our community will build using this new platform.
]]>
We are excited to announce RIIS LLC has joined the Dronecode Foundation as a Silver Member, bringing their extensive experience in drone software development to the PX4 community.
RIIS is a leading provider of specialized software development services with a proven track record for delivering advanced solutions to prominent players from all corners of the drone industry, including Teal, Aerodrome, Darkhive and more. The company’s portfolio of projects utilizing PX4, QGroundControl, and MAVSDK, and its work assisting companies in advancing their UAS products and applications make them a valuable addition to the Dronecode Foundation members.
Godfrey Nolan, President of RIIS, shared his excitement about the news: “Joining Dronecode represents a significant milestone for RIIS, allowing us to give back to the open-source community,” Nolan said. “It’s our way of acknowledging the benefits and advancements we’ve gained from the PX4 ecosystem and its communities over the years.”

RIIS’ extensive background in enterprise-level drone software development and their understanding of manufacturers’ needs position them uniquely to contribute to the advancement of open-source drone technologies. This experience will be invaluable to the PX4 community now and in the future.
We warmly welcome RIIS LLC to the Dronecode Foundation and look forward to the innovative contributions they will bring to open source.
]]>
We are thrilled to announce that Zingto has joined the Dronecode Foundation as a Silver Member. This partnership marks an exciting development for both organizations, promising to enhance the landscape of UAV technology through collaboration and innovation.
Zingto is a high-tech company specializing in the design and production of gimbaled imaging systems for both crewed and uncrewed aircraft. Their expertise lies in developing advanced optical systems that are MAVLink compatible and optimized for Size, Weight, Power, and Cost (SWaP-C), making them ideal for a wide range of aerospace applications.
Mr. Li, the founder of Zingto, expressed his enthusiasm about joining the Dronecode community, “It is a great honor to join the Dronecode-supported PX4 open-source ecosystem, which helps customers quickly and deeply adapt to the features and technologies needed for different types of projects, deepens cooperation between parties, and promotes industry development,” said Li.
Zingto’s product line includes a variety of high-performance optical payloads ranging from single sensor to multi-sensor arrays designed for uncrewed aerial systems. This includes products, such as the INYYO A12 4K AI electro-optical payload and the INYYO QO2 MINI AI dual-optical payload, which showcase the company’s commitment to making enviable commercial grade sensor packages.
The company’s expertise in gimbaled imaging systems and their focus on MAVLink compatibility aligns perfectly with the ongoing development of Dronecode’s open source projects like PX4, MAVLink, and QGroundControl. Zingto’s knowledge in these domains are poised to bring significant value to the PX4 ecosystem, and we look forward to its investment in the PX4 community and open source.
We extend a warm welcome to Zingto and look forward to the exciting innovations that this member will bring to the PX4 ecosystem!
]]>
We are thrilled to announce that ZeroOne has joined the Dronecode Foundation as a Silver Member. This partnership marks a significant step forward for both organizations, promising to enhance the landscape of UAV technology through collaboration and innovation.
ZeroOne is building cutting-edge UAV solutions, focusing on the development of advanced avionics systems. Their range of products and services include flight controllers like the X6 and X6 Nano, GPS, data links, and the customization of ground control software.
According to Zane Rick, Director of Operations at ZeroOne, “ZeroOne has been engaged in UAV research for many years. We are committed to providing customers with stable and reliable avionics systems, such as flight controller, GPS, RTK, data link, and ground control software development. The PX4 open-source ecosystem supported by Dronecode provides a powerful platform and functions for our work and customers, allowing us to quickly develop on this basis to meet the requirements of the project. I think joining Dronecode is a good start for both parties, making our connection closer and enriching the industry ecology. Let users have more and better product choices. ZeroOne strives to create a complete UAV solution for users, which is stable, reliable, and customizable, making it possible for users to do anything!”
ZeroOne’s membership in Dronecode is poised to bring several benefits to the PX4 developer community. Enhanced collaboration between ZeroOne’s expertise in flight controllers and the ongoing development of open-source projects like PX4, MAVLink, and QGroundControl will drive innovation and customization. The collaboration is expected to enrich the open source drone development ecosystem, providing users with a wider range of high-quality product choices.
We extend a warm welcome to ZeroOne and look forward to the exciting innovations that this partnership will bring. Together, we are committed to pushing the boundaries of UAV technology and providing users with the best possible tools to achieve their goals.
For more information about ZeroOne and their contributions to the PX4 ecosystem, please visit their website at ZeroOne.
]]>
Neros Technologies is a cutting-edge startup that is revolutionizing the unmanned aerial vehicle (UAV) industry. Founded by Soren Monroe-Anderson and Olaf Hichwa, two former teenage drone racing champions, Neros is focused on vertically integrating the development and manufacturing of unmanned defense systems in America.
The company’s mission is to enable mass production of cost-effective unmanned defense systems, with a particular emphasis on securing the supply chain within the United States.
Neros’ commitment to innovation and rapid development aligns perfectly with the Dronecode Foundation’s goals. By joining as a Silver Member, Neros is demonstrating its dedication to open-source collaboration and standardization in the drone industry.
Olaf Hichwa, Co-Founder & CTO of Neros, expressed enthusiasm about the partnership: “Neros Technology is working on integrating the latest Pixhawk Open Standards into our autonomy stack to help with the rapid deployment of UAVs. We are happy to join the Dronecode Foundation and contribute to the growing community of Aerial Robotics technologies at the forefront of innovation.”
This integration of Pixhawk Open Standards into Neros’ autonomy stack represents a significant step towards interoperability and standardization in the UAV industry. It also highlights the growing importance of open-source technologies in driving innovation and efficiency in drone development.
We look forward to the contributions Neros will make to our community and the advancements we can achieve together. Their expertise in rapid development, real-world deployment, and scaling production will be invaluable as we work towards our shared goal of advancing open-source drone technologies.
]]>
VayDyn Technologies has joined Dronecode to harness both entities’ collective knowledge and skill to produce state-of-the-art flight controllers and enable manufacturers throughout the APAC region to soar.
At VayDyn Technologies, we are dedicated to advancing UAV technologies and making them more accessible for manufacturers and enthusiasts. Partnering with Dronecode Foundation, we aim to leverage the combined expertise of both organizations to design and manufacture cutting-edge flight controllers, facilitating the production of high-quality UAVs that meet global standards and empowering manufacturers in India and the broader APAC region.
Nilesh Chavhan, Director Engineering.
VayDyn is a startup at the IISc(Indian Institute of Science)-supported non-profit organization AI and Robotics Technology Park (ARTPark) whose UASs combine high-precision sensors with artificial intelligence to perform complicated multidimensional tasks. Its tech was recently utilized by the Bengaluru civic body Bruhat Bengaluru Mahanagara Palike (BBMP) for the purpose of counting animal populations, but this example only demonstrates a small fraction of what VayDyn expects its drones to be used for. As it says on its website, “..we are moving closer towards complete autonomy in unmanned aerial systems,” and as members of the Dronecode Foundation they plan to contribute to the PX4 community and open source drone ecosystem.
]]>We highly appreciate the Dronecode community’s wealth of experience and commitment to making technology accessible. Excited to be part of the community, we look forward to contributing and playing a role in fostering the growth of the UAV industry through innovation.
Nilesh Chavhan, Director Engineering.

Macfos Electronics Pvt Ltd (Robu.in) has joined Dronecode to create stronger bonds with the international open source drone developer community and the Indian drone industry.
We at Robu, have been serving the Indian drone industry for quite a long time by providing ‘Hard to Find’ materials and parts, and our ties to the local market are stronger than ever. With this partnership we aspire to be a key player of innovation within the global UAV industry and subsequently become a bridge between the PX4 ecosystem and Indian communities. The vast amount of experience and resources of the Dronecode Foundation will surely be the key factor in this journey.
Nilesh Chavhan, Director Engineering.

Founded in 2014 Robu.in has grown to become India’s largest robotics e-commerce platform featuring a vast selection of electronic components and parts for robots, drones, embedded systems, RC, and IoT devices. Focused on serving the DIYer, Robu.in even provides services like PCB manufacturing, 3D printing, and laser cutting. Carrying an enviable array of flight controllers, sensors, rotors, antennas, gimbals, and even GPS modules, companies, and drone developers can derive significant benefits from accessing the Robu.in site. Macfos Electronics Pvt Ltd (Robu.in) joining the Dronecode Foundation shows their continued commitment to serving the people who are building the innovative drone technology that will shape the future.
]]>We very much value the increased access to the open source drone ecosystem and the opportunity to engage with the drone developer community that this membership will bring to the table for us. We look forward to this experience and will surely try to do our best in terms of driving innovation. The time for us becoming a part of theDronecode community could not have been better. Exciting times ahead!
Nilesh Chavhan, Director Engineering.

The Dronecode community came together to celebrate another successful year at the PX4 Developer Summit in New Orleans on October 21-22. Hosted next to ROSCon 2023 with the generous help of the Open Source Robotics Foundation we secured space at the Hyatt Regency. Together, we managed to bring close to a thousand robotics engineers to the Big Easy.  Thanks OSRF!
Thanks OSRF!
We also want to thank the fantastic Linux Foundation Events team for running another flawless event and taking care of every small detail to ensure everyone felt included and part of the celebration. Similarly, I (Ramón) want to thank the Dronecode Staff who helped me run this event, once again pushing the boundaries with very few resources. Lastly, we want to thank our Sponsors for their commitment to open source and for believing in our humble community of aerial robotics professionals.




Over the two days at the summit, attendees enjoyed 45 talks, including 27 breakout sessions, 11 keynotes, five lightning talks, and two incredible workshops, thanks to the support of 54 speakers. Like last year, the Call For Proposals had tremendous success, receiving more than 50 applications, which the Program Committee reviewed and voted on, accepting 34. Thanks to the increased quality of the proposals received this year, we had the most challenging time putting together the program. Given time constraints, we couldn’t fit all the proposals that came through the CFP into the schedule. However, we are proud of the results as the program reflected the maturity of our community and signaled a bright future for the technology.
The summit was kicked-off with the opening remarks by our General Manager (Ramón Roche) who then introduced the keynote track. He was followed immediately by Hrishikesh Ballal Co-Founder and Lead Developer, Openskies Aerial Technology, who discussed the importance of UTM and regulation will have for opening up advanced UAV operations including BVLOS.
This rest year’s keynotes focused on fostering greater collaboration between the general and aerial robotics engineers, and highlighted the amazing work of the leaders in the open source drone development community.


Dr. Satya Mallick, CEO of OpenCV, Davide Faconti, Robotics Architect and Staff Engineer at PickNik Robotics, Chris Lalancette, ROS 2 Technical Lead, Intrinsic, and a Developer Panel with PX4 and ROS maintainers Daniel Agar, Thomas Statsny, Tully Foote, and Geoff Biggs all talked about the importance of building bridges between our communities and provided clear paths forward to build a roadmap together.


Dr. Lorenz Meier, CEO and Founder of Auterion, Inc., Robert Cheek, Chief Operating Officer, UVify, Vince Poon, CTO, Holybro, and Chad Sweet CEO and Co-founder, ModalAI, showcased the landmark work and important developments that will lay the groundwork for the next phase of drone development.

Thanks to the Scholarships program, which provides funding for underrepresented groups in our community and those who couldn’t attend otherwise, Dronecode was able to help six members of our community with travel and tickets to the summit. We were thrilled to see the group come together, a set of brilliant engineers who will undoubtedly shape the future of the robotics industry.




At the end of Day 1, our Platinum sponsor UVify hosted a 500 drone light show above the Mississippi River, greeting us with a fantastic display full of surprises with familiar shapes that our community cheered and celebrated, marking a tremendous high point to an already remarkable beginning to our event.

Special thanks to CubePilot for sponsoring our event t-shirts designed by criobravo, outfitting our attendees with a jazzy piece of art befitting of New Orleans. We’d also like to thank ARK Electronics for sponsoring the session recordings, which we are releasing on our YouTube channel.
It’s hard to overstate just how amazing the networking at the event was this year. Participants from over 30 countries came together to share knowledge and make connections. Careers got off the ground and new business relationships were forged. The event truly felt like a bridge between academia and industry. Special thanks to UVify and Rajant who sponsored the official after party at Fulton Alley. It was the perfect end to the weekend and a great final chance to hang before all heading off.
By the way, don’t miss out on all the photos taken during the event. Thanks for everything. We hope to see you next year!
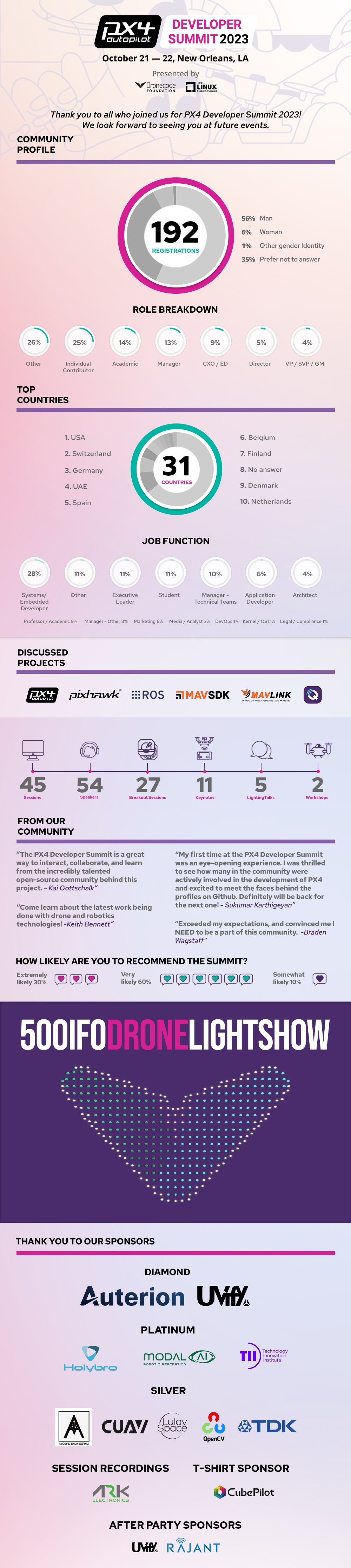

The PX4 Autonomy Developer Kit by ModalAI, Inc. is the latest development kit for the PX4 Autopilot, tailored for those at the forefront of autonomous navigation solutions. Powered by the industry leading VOXLⓇ 2, the kit offers a ready to develop UAS for GPS-denied navigation and aerial AI development, ensuring high performance and seamless integration targeted for the PX4, ROS, and TensorFlow communities.
The Autonomy Kit was meticulously pre-configured with Size, Weight, and Power (SWaP)-optimized sensors, ensuring developers have the best tools without exhaustive customization. Whether the task involves developing navigation for intricate indoor spaces or vast outdoor terrains, the PX4 Autonomy Developer Kit by ModalAI is built by and for developers to handle the challenge.
Developers will be able to harness the latest PX4 Autopilot changes, thanks to ModalAI’s commitment to supporting PX4 upstream, which means you can run the latest and greatest contributions, making it perfect as a fast prototyping developer kit bundled with the newest sensor suite. This integration promises sustainability for current projects and paves the way for future innovations.
In collaboration with the Dronecode Foundation, the Autonomy Kit provides a ready-to-fly development platform that bridges the gap between PX4 and ROS, made for those looking to push the limits of autonomy and significantly improve their time to market.
The base model features an impressive 30+ minutes of flight time on a 210mm airframe weighing only 265 grams. The Autonomy Developer Kit also houses a 12.3 megapixel SonyⓇ IMX412 sensor, VOXL ESC Mini, and an STM VL54L1X Rangefinder landing sensor—just what you need to succeed in your PX4 development journey.
“Since its founding, ModalAI has been committed to advancing the computer vision capabilities of the open source UAS community,” said Chad Sweet, CEO and co-founder of ModalAI “We expect the PX4 Autonomy Developer Kit to significantly accelerate that mission.”
Chad Sweet, CEO and co-founder of ModalAI
“Easing the journey into aerial robotics development is one of the largest barriers to growing the ecosystem. Developers are constantly faced with many challenges while getting projects off the ground such as choosing components, determining software support and dealing with the constantly evolving codebases. The field is ripe for vendors to target the ever-growing developer workforce in the drone industry,” said Ramon Roche, General Manager of the Dronecode Foundation. “The Dronecode Foundation is excited to welcome the PX4 Autonomy Developer Kit to the PX4 hardware ecosystem, helping bring down the barrier of entry for newcomers getting started in aerial robotics with an RTD (Ready to Develop) option backed by ModalAI.”
Ramon Roche, General Manager of the Dronecode Foundation
The Dronecode Foundation and ModalAI plan to offer and support this configuration at least through 2025, supporting PX4 and ROS 2 and maintaining a dedicated forum channel for direct communication between developers and ModalAI engineers. The new PX4 Autonomy Developer Kit is available to order beginning today starting from $2,749.99 at www.modalai.com/px4-autonomy-dev-kit
]]>
ARK Electronics has joined Dronecode to reaffirm its commitment to open source and to continue its support of the open drone hardware community.
ARK Electronics is excited to finally join the Dronecode Foundation after years of collaboration. We view this partnership as not merely a business arrangement but as a pivotal catalyst for innovation. The profound impact of open technologies at ARK Electronics cannot be overstated, fostering a culture of collaboration and transparency that has elevated our product development. Working with Dronecode and open source has been a huge benefit to ARK Electronics growth in the drone industry. We look forward to continuing to work with Dronecode to enable companies to get to market quicker with open source technology.
CEO of ARK Electronics – Alex Klimaj
Known for its enviable flight controllers and sensors, ARK Electronics has made a name for itself in the five years since its founding. Its hardware is designed, manufactured, and tested in the USA, even offering flight controllers that meet the strict requirements to be rated as NDAA compliant for clients engaged in supplying the federal government. Its owner, Alex Klimaj, has earned a great reputation in the PX4 developer community for his contributions and will continue to offer his expertise now as a proud Silver Member of the Dronecode Foundation.



For years now, the Dronecode team has regularly attended the Commercial UAV Expo in Las Vegas. We travel to the event annually to take advantage of the opportunity to meet the PX4 community in person and foster direct connections with members, maintainers, and other ecosystem players face-to-face.
We’ve partnered with Commercial UAV Expo once again this year to co-promote each other’s events, and we are looking forward to attending once again. If you want to meet us there this September 5-7 at Caesar’s Forum, you can use the code SAVE100 for $100 off a conference pass or a free exhibit hall pass!
At this year’s show, you’ll be able to see some great firms showing off amazing hardware built on top of open standards. Freefly Systems, Sony, Watts Innovation, and Wingtra all utilize PX4 or the Pixhawk standard and have booths at the show. You may even see the Dronecode Foundation’s General Manager, Ramón Roche, walking the floor and interviewing innovators from every corner of the industry.
Conferences provide an unrivaled opportunity to get face time with leaders in the space, whether it’s during the sessions or in the exhibit hall. Last year, Ramon interviewed Bobby Watts, CEO and Principal Engineer of Watts Innovation, while at the event, and Bobby was kind enough to share the entire origin story of the company and the reasons why they adopted PX4.
The commercial drone sector never stops evolving, and Commercial UAV Expo provides one of the best chances to see the next generation of UAS technology hitting the market. In total, it brings together 250+ vendors providing solutions for fields as diverse as agriculture, construction, surveying and mapping, infrastructure inspection, and public safety. If you’re an engineer or company looking to meet your end-user, this is the spot to do so.
It’s certainly going to be an exciting fall event-wise for drone developers. We hope to see you IRL at the Commercial UAV Expo this year or this October 21-22 in New Orleans at the PX4 Developer Summit.
]]>
Hello Dronecode community,
We are thrilled to announce an exciting development in our mission to foster open-source software for uncrewed vehicles. Two web empower tools, MAVLink2Rest and MAVLink Camera Manager, have officially migrated from their original creators to the MAVLink organization.
A Brief History
MAVLink2Rest and MAVLink Camera Manager were initially developed by Patrick Pereira (patrickelectric) as proof of concept for the companion system for Blue Robotics, the project now known as BlueOS. MAVLink2Rest aims to provide a RESTful API over the MAVLink protocol, facilitating seamless communication between uncrewed systems and web applications. MAVLink Camera Manager is an extensible, cross-platform camera server with a RESTful API to control and create camera streams, providing MAVLink integration with ground control stations that implement the MAVLink Camera Protocol.
The move is a significant step forward. It recognizes the tools’ importance in the community and ensures their continued development and maintenance under the new organization. This move will facilitate greater collaboration and ensure their alignment with the broader MAVLink ecosystem.
A Word of Thanks
We want to thank Patrick for his contributions to the MAVLink organization. His work on MAVLink2Rest and MAVLink Camera Manager has paved the way for innovative web-based drone solutions. We also want to thank Blue Robotics for their financial support in developing these tools. Their commitment to open-source solutions continues to drive the industry forward for open skies and open waters.
Looking Ahead
As we embark on this new journey, we look forward to the continued growth and development of MAVLink2Rest and MAVLink Camera Manager under the MAVLink organization. We are excited about this migration’s possibilities and can’t wait to see where this journey takes us.
Stay tuned for more updates, and as always, happy flying!
]]>
SIYI Technology has joined Dronecode as a Silver Member to invest in bringing its users a next-level experience and expand upon its already respected product line by integrating closely with the PX4 ecosystem.
SIYI Technology relies on wireless HD image transmission technologies, gimbal control and motor drive technologies, camera imaging technologies, control system, AI algorithms, and built-smart robotic ecology. Grateful for the support and trust of customers, SIYI can maintain mutual-benefit interaction with the PX4 community through the actual application of our products in a large number of scenarios.
CEO of SIYI Technology – Mr Luo Xiaogang
SIYI’s suite of products already features a wide range of top-tier drone hardware from autopilots and gimbals all the way up to complete multirotor drone packages. Its airframes, gimbals, and sensors are deployed in a variety of enterprise applications, from agriculture to commercial inspection. Both the PX4 ecosystem and SIYI will benefit greatly from the cross-pollination of ideas and new solutions SIYI will bring to the PX4 developer community as a member of Dronecode.
We believe that establishing direct contact with the Dronecode Foundation can greatly enhance the user experience of SIYI products under the PX4 ecosystem and significantly promote the prosperity and development of the open-source ecosystem of drones and smart robots. In the coming period, SIYI’s development team and manufacturing department will collaborate to launch many interesting, competitive, and high-quality products. Stay tuned!
CEO of SIYI Technology – Mr Luo Xiaogang


Are you a software or hardware developer excited about new technologies and the prospects of robotics, whether on the ground or in the air? Are you eager to share your knowledge with colleagues in the field and learn from them? Is open source your jam? Then mark your calendar for October 18-22, 2023 — because that’s when the events begin! Two major robotics events come together: ROSCon 23 and the PX4 Developer Summit for one innovative week packed with thought-provoking keynotes, insightful workshops, hands-on learning sessions, and the opportunity to engage with an array of experts, pioneers, and fellow enthusiasts in the open-source robotics world.
Register for both conferences to take advantage of our special promotion – and prepare to embrace the future of robotics!
When you register for either the PX4 Developer Summit or ROSCon 2023, you’ll receive a $100 discount code to use with your registration for the other event!
A Combination of ROSCon 23 and PX4 Developer Summit
Get ready for an exciting week that combines two of the biggest names in the world of robotics! ROSCon, renowned for being the meeting point of the brightest minds in the Robot Operating System (ROS) community, will now coincide with the PX4 Developer Summit, the preeminent event known for its influence in the aerial robotics and overall uncrewed vehicle developer community.
This week-long celebration promises to be a hub of innovation, showcasing the latest open source robotics technology advancements. With an impressive lineup of speakers, insightful presentations, and practical demos, this event is a “can’t miss” for anyone interested in robotics.
The two events together will cover an extensive array of topics, including but not limited to:
- The latest advancements in the ROS and PX4 ecosystem
- Real-world applications of all types of robots, including mobile and non-mobile ones
- Artificial Intelligence and machine learning in robotics
- Emerging trends and future directions in open source robotics
- Ethics and social implications of robotics and AI
Join us as we convene a community of like-minded experts, discover new ideas, and shape the future of robotics together.
The Unique Opportunity to Attend ROSCon and the PX4 Developer Conference in One Trip
ROSCon and the PX4 Developer Conference are must-attend events for anyone looking to stay ahead in the robotics industry. The opportunity to attend both events in one trip is convenient and a budget-saver, but it also offers a unique chance to learn from some of the brightest minds and cutting-edge technologies in the field. With ROSCon’s focus on Robot Operating System and PX4 Developer Conference’s focus on open-source flight control software, the combination of the two events is a perfect blend of expertise from different aspects of the industry. Take advantage of this incredible opportunity to learn and network.
Hear Best Practices, Connect with Professionals, and Network
In today’s tech-driven world, open source software is taking center stage. To stay ahead of the game, hearing best practices, connecting with professionals, and engaging with the community are essential; in-person gatherings have a unique value. Collaboration is vital to developing innovative solutions and creating impact. Engaging with professionals from different industries expands your network and offers opportunities for growth and development. Whether you’re a seasoned pro or just starting out, there’s always room to learn and connect. Don’t miss the opportunity to collaborate with others you wouldn’t usually see at your conference.
Enjoy the City of New Orleans While Attending the Conferences
New Orleans is a city that captivates visitors with its blend of old-world charm and modern-day excitement. From historic sites and world-famous cuisine to world-renowned live music venues, this city offers something for everyone. Wander the streets, sample delicious Creole cuisine, or jazz up your night at one of the many live music venues that pepper the city. Take a peek at Visit New Orleans.
Get a Discounted Rate for Attending Both Conferences
Mark your calendars for an excellent opportunity to immerse yourself in the full breadth of the field of robotics at a discounted price. When you register for either event, you’ll receive a special discount code to save $100 off the price of the other.
Learn more about and register for ROSCon 2023 and the PX4 Developer Summit.
We hope you can join us for both.
]]>
We would like to welcome two Board members elected to serve as representatives of silver and gold members: Gerald Peklar and Chad Sweet. The election was held over the past few weeks, and the new Board members will start this month.
Gerald Peklar – Gold Member Representative
Gerald Peklar is a project and technical solutions manager of mobile robotics at NXP Semiconductors in Hamburg, Germany. Gerald has a background in electronics engineering and has worked at NXP since 2014, leading publicly funded projects and open reference design hardware and software solutions within the mobile robotics team. He also holds EASA remote pilot certificates and is a drone test pilot for all NXP internal developments. This is the first time Gerald has served on the Board. He is an RC model and race drone enthusiast, so he is fortunate enough to make his hobby his profession.
Chad Sweet – Silver Member Representative
Chad Sweet is the CEO & Founder of ModalAI. Before ModalAI, he worked at Qualcomm in San Diego from 1998 through 2018, where from 2012, he led robotics R&D focused on drones. Since 2014, he has collaborated with PX4 leaders to understand the needs and requirements of drone hardware and software that will help developers accelerate the development of autonomous drones. Through ModalAI, Chad oversees the development of their autonomous VOXL autopilots, specifically designed to be open and developer friendly. Over 500 global developers are using VOXL with PX4 flight control as the core of their drones, and ModalAI works with these manufacturers and ecosystem contributors to incorporate and promote Dronecode hosted projects like PX4, QGroundControl, MAVSDK, and MAVLink. Chad served on the Board for the past two years and was reelected.
See Behind The Tech Episode #3 featuring Chad Sweet.
We also want to thank Vince Poon, the CTO of Holybro, for his willingness to serve on the Board. He is a valuable community member, and we hope he can serve in the future.
A Heartfelt Thanks to Our Departing Board Members
As we welcome new faces to our Board, we must also take a moment to express our deepest gratitude to those who are stepping down: Hyon Lim of UVify and Paul Stubbs.
See Hyon’s keynote at the PX4 Developer Summit 2022 in Austin, Texas.
We extend our sincerest thank you for your unwavering dedication, invaluable contributions, and countless hours you devoted to the Dronecode Foundation. Your commitment to fostering an open-source community, your leadership in navigating the complexities of the drone industry, and your passion for innovation have left an indelible mark on our Foundation. Perhaps we will be fortunate enough to see you on the Board again.
See Paul’s talk at the PX4 Developer Summit 2022 in Austin, Texas
The Current Board of Directors
The 2023 Board of Directors are:
- Lorenz Meier (Community Director) — Chairman
- Daniel Agar (PX4 Maintainer) — TSC Chairman
- Markus Achtelik (Auterion) — Platinum director
- Gerald Peklar (NXP Semiconductors) — Gold director
- Chad Sweet (ModalAI) — Silver Director
The next elections for the Board will be held in April 2024. Silver and Gold director’s positions will be up for election. Look for a call for nominations in March 2024.
As we welcome our new board members, we look forward to the fresh perspectives and ideas they will bring to our foundation. We are confident that under their leadership, the Dronecode Foundation will continue to thrive and set new standards in the drone industry.
Understanding the Role of Our Board of Directors
The Board of Directors of the Dronecode Foundation is not merely a governing entity; it is the strategic nucleus of our organization. They are entrusted with strategic supervision, ensuring our unwavering commitment to our mission and the continuous cultivation of community and innovation.
The significance of a board of directors is particularly pronounced in open source foundations like ours. Such foundations offer a vendor-neutral platform that champions transparency, inclusivity, and equitable opportunities indispensable for the growth and innovation ly aspire to. By fostering a collaborative environment for developers, end-users, and vendors to propel the industry forward, we can guarantee that our endeavors genuinely reflect the community’s needs and we share in the collective innovation.
We have come so far, and we can’t wait to see what is to come.
The Importance of Membership
Members are even more critical than the board. Membership in the Dronecode Foundation is an opportunity to take an active role in supporting the growth and evolution of the open drone ecosystem. Members are even more critical than the board. Our members are part of a vibrant community, working together to advance the drone industry through open source. Learn more here.
]]>
The HoverGames 3 challenge kicked off on October 6th, 2022, run by Gold member NXP Semiconductor and our partner Hackster.io, as an effort to help developers innovate using world-class technology and open source to help secure a sustainable food production future.
Challengers could use a Quadcopter or a Rover, loaded with fantastic hardware, including Bosch BME688, FMUK66, and NAVQ+ by NXP, controlled by the PX4 Autopilot, with some challengers going as far as running ROS 2 + PX4 setups to reach their goals.
The top three winners receive cash prizes and free tickets to the PX4 Developer Summit in October, with the first-place team receiving a travel scholarship to the event, by Dronecode Foundation.
But that’s not the only prize, the three runner-up projects each received $500. Lastly, Bosch awards $500 to the most innovative use of sensors, and the Dronecode Foundation awards a project for contributing to open source a prize of $500.
The team of judges consisted of industry experts from NXP Semiconductor, Bosch, and Dronecode Foundation. The challenge was tough, but twenty-eight teams persisted, making the judges’ job even harder.
Nevertheless, the winners were announced today. We couldn’t be happier with the results, especially with the Open Source Award Winner, who built a PX4 driver for the Bosch BME688 with a uORB pipeline built for his application.
Join us in congratulating the winners, who are all invited to join us at the PX4 Developer Summit next October for FREE, with first-place winners earning travel to NOLA to showcase their project to the whole open-source robotics community.
Lastly, we want to thank NXP for the opportunity to be part of this great challenge and Hackster for being the best partner. Congratulations to both on another great season of HoverGames. We can’t wait for what you come up with net year!
Top three challengers
- 1st Place: agriHoverGames – a smart drone that solves farmer’s problems
- 2nd Place: Autonomous soil Quality assessment (AutoSQA)
- 3rd Place: Crop Mapping and Survey Drone
Runner Ups
- Salt Water Tracker (SWT)
- HoverGames #3: Guardian of the Field – Buggy QXA3
- Cigritous: Crop Monitoring with Automated UAV Spray Response
Bosc Sensortec Sustainability Award
Dronecode Foundation Open Source Award
]]>
Are you a software or hardware developer working with drones? Are you interested in contributing to the future of autonomous flight?
The 2023 PX4 Autopilot Developer Summit is the perfect opportunity for you to network, learn, and collaborate with other drone developers from around the world. The Summit is an annual event that brings together the PX4 community to share their insights, knowledge, and experiences across the entire Dronecode ecosystem, including PX4 Autopilot, MAVLINK, MAVSKD, QGroundControl, and Pixhawk. BONUS: It is being held adjacent to ROSCon 2023, so you can attend both in one trip.
This year’s Summit will offer attendees the chance to meet other developers in person and gain new insights into the latest advancements in autonomous flight. Read on to learn more about what to expect and the value of participating.
It is really cool to meet the community, the developers that, early on, you have just met on calls or via GitHub panels.
Michael Achtelik, Vice President, Engineering, Auterion
What is the PX4 Autopilot Developer Summit?
The PX4 Autopilot Developer Summit is an annual event that brings together the PX4 community, including software and hardware developers, researchers, and enthusiasts. The Summit allows attendees to network, learn, collaborate with other drone developers, and gain new insights into the latest advancements in autonomous flight.
It also provides a platform for participants to share their insights, knowledge, and experiences in drone development. The event features keynote speeches from industry experts, technical talks and workshops, exhibitions and demonstrations of the latest technologies, and networking opportunities.
Whether you’re a seasoned developer or just starting in the field of drone development, the PX4 Autopilot Developer Summit is the perfect opportunity to gain new skills, share your knowledge, and connect with other professionals in the industry. So, mark your calendars for October 21-23, 2023, and join us in New Orleans at the 2023 PX4 Autopilot Developer Summit for an unforgettable experience.
What to Expect at the Summit?
The 2023 PX4 Autopilot Developer Summit offers attendees a variety of exciting and informative activities, including:
Keynote Talks from Industry Experts
The Summit features keynote speeches from industry experts who will share their insights and experiences in drone development. These talks are an excellent opportunity to learn from the leading experts in the industry and gain new perspectives on the latest advancements in autonomous flight.
Technical Talks and Workshops
These sessions provide attendees with the opportunity to learn about the latest technologies, best practices, and emerging trends in the industry. Experts lead the talks and workshops in their respective fields; attendees can ask questions and participate in discussions.
Exhibitions and Demonstrations of the Latest Technologies
The Summit features exhibitions and demonstrations of the latest technologies and products related to drone development. They allow attendees to see the latest innovations in the industry and gain hands-on experience with new products.
Networking Opportunities
We meet in person to network. Attendees will have ample opportunities for “hallway sessions” to meet and connect with other developers and engineers from around the world. Who knows what future collaborations will come from it?
Really interacting with a lot of smart people to talk PX4, drones, and really jumping in quickly to great conversations
Chad Sweet, CEO and Co-founder, ModalAI
Overall, the 2023 PX4 Autopilot Developer Summit is an exciting and informative event that offers attendees a unique opportunity to network, learn, and collaborate with other professionals in the industry. Whether you’re a seasoned developer or engineer or just starting in the field, this event is a must-attend.
Call for Proposals
The Call for Proposals (CFP) for the 2023 PX4 Autopilot Developer Summit is now open, and we are inviting developers, researchers, and enthusiasts to submit proposals for talks, workshops, and panel discussions.
Why should you submit a proposal to present?
Showcase your work: The Summit provides a platform for you to showcase your work, share your knowledge and experiences, and gain recognition from the community.
Expand your network: Presenting at the Summit offers the opportunity to expand your network, connect with other professionals in the industry, and build collaborations.
Enhance your skills: Preparing a proposal and presenting at the Summit is a great way to enhance your skills in public speaking and delivering technical information to a diverse audience.
How to submit a proposal
Visit the CFP page on the PX4 Autopilot Developer Summit website and follow the instructions to submit a proposal. The proposal submission form includes the following information:
- Title of the presentation
- Presenter’s name and contact information
- Presentation abstract
- Presentation outline
- Presenter’s biography
- Proposed length of your presentation (in minutes)
Suggested Topics:
- Any talks related to the open source projects hosted within the Dronecode Foundation umbrella: PX4 Autopilot, Pixhawk, MAVLink, QGroundControl, MAVSDK
- ROS, ROS 2, Gazebo, DDS
- Open Standards
- Open Hardware
- Offboard control
- State Estimation
- Simulation
- Hardware integration
- Computer Vision, VIO, Obstacle Avoidance
- AI / ML
- Deep Learning
- Cloud / Edge
- Advancements in hardware development for Drones
- Academia/Research submissions are highly encouraged
And these are the types of submissions we consider:
- Session Presentation (typically 30 minutes in length)
- Panel Discussion (typically 30 minutes in length)
- Lightning Talks (typically 5-15 minutes in length)
- Workshops (typically 1.5 to 2 hours in length)
Importance of submitting
Submitting a proposal is essential to the success of the Summit. Participating in the Summit allows you to share your knowledge and experiences with other professionals in the industry. So, submit your proposals today, and join us at the 2023 PX4 Autopilot Developer Summit! With your contributions, the event is possible.
How to Register for the Summit
Registering for the 2023 PX4 Autopilot Developer Summit is easy. Follow these simple steps to secure your spot:
- Visit the registration page on the PX4 Autopilot Developer Summit website.
- Fill out the registration form with your personal and payment information.
- Review your registration information and submit your registration.
- You will receive a confirmation email with your registration details.
Fees
- Early Bird Registration (until June 30th, 2023): $400 USD
- Standard Registration (until September 30th, 2023): $550 USD
- Late Registration (after October 1st, 2023): $600 USD
Academic Fees
- Early Bird Registration (until June 30th, 2023): $300 USD
- Standard Registration (until September 30th, 2023): $400 USD
- Late Registration (after October 1st, 2023): $550 USD
Scholarships
The Dronecode Foundation offers scholarships and financial aid to support individuals from traditionally underrepresented and/or marginalized groups and to whoever is not being assisted or sponsored by a company or organization who may otherwise be unable to attend the Summit due to financial constraints. To apply for financial assistance, please visit the “Scholarships and Financial Aid” page on the PX4 Autopilot Developer Summit website.
Scholarship Timeline
- Application Deadline: August 20th, 2023
- Applications Notified: Week of August 25th, 2023
Accommodation Options for Attendees
The Summit will be held at the Hyatt Regency New Orleans. We secured a room block at the hotel, a special nightly rate of $229 + tax. The hotel room block is limited and will likely sell out in advance.
Get all the details on the event venue & travel page.
Deadlines
- Early Bird Registration Deadline: June 30th, 2023
- Standard Registration Deadline: October 15th, 2023
- Late Registration Deadline: After October 15th, 2023 (Onsite Registration Available)
It is really good to meet people. We had a fantastic drone light show last night, running PX4, so every single aspect of the past two days has exceeded my expectations
Lorenz Meier, Founder and CEO, Auterion
Don’t miss the opportunity to participate in the 2023 PX4 Autopilot Developer Summit! Register today to secure your spot and take advantage of the early bird registration fee. We look forward to seeing you at the event.
]]>
DroneBlocks has joined Dronecode to better integrate open source technologies into STEM classroom environments. They have created software, drone simulation, and a custom tailored curriculum laser-focused on making it as easy for students to jump into drone development with as little friction as possible. By joining the Dronecode Foundation, they will establish a stronger path from early STEM education to successful engineering careers.
“At DroneBlocks we have been at the forefront of creating engaging STEM learning experiences with drones, block coding, and curriculum. It is with great enthusiasm that we join the Dronecode Foundation. We have followed the community for many years and benefitted from several projects hosted by the Foundation. Our intent is to increase our footprint by making the DroneBlocks app compatible with PX4-based drones and bring them into the classroom. We look forward to giving back to the community that has been instrumental in moving the open source drone industry forward.”
Dennis Baldwin, Founder

From drag and drop coding to modular drone kits, the work DroneBlocks has done to make drone development accessible to all age groups and skill levels is truly phenomenal. Utilizing drones, students receive tangible feedback on their programming and are empowered to learn through action and experimentation.


Sunflower Labs today joins Dronecode to continue supporting the open-source community. They are the creators of the Beehive, a powerful drone-in-a-box solution for security applications. They are a long time supporter and users of PX4 and Pixhawk, with their membership they aim to continue their support and to collaborate with the wider community.
“It would have been impossible to build a product such as the Sunflower Labs autonomous security drone without the open source community. Amazing contributions of thousands of individuals to the Dronecode projects advanced the development of UAS vehicles by decades. We have greatly benefited from these generous contributions, as well as the interactions with the community. While we are officially joining as members today, we have been participants and contributors of the Pixhawk project for years and we are proud to be a part of it.”
Nicolas de Palézieux dit Falconnet, VP of R&D at Sunflower Labs
Sunflower Labs is excited to implement the latest Pixhawk Standards on their new products, and is working closely with Dronecode to help expand the Pixhawk Ecosystem for the greater good of our community and industry.
Read more about Sunflower Labs and their recent developments on their website. https://sunflower-labs.com/
]]>
The beauty of open source is that innovation is fueled by a group of individuals coming together around a common goal to build a shared resource. Then, individuals innovate on top of that. The beauty of open standards, in particular, is that the community has settled on a consistent way hardware and software integrates together so that components from different companies can consistently work together. This interoperability through collaboration builds everyone up and drives the innovation we see in drones and uncrewed vehicles.
Open standards begin with an open process. At the Dronecode Foundation (DF), we foster the Pixhawk FMU (Flight Management Units) Open Standards with contributions and participation from the Pixhawk Special Interest Group during FMU Workgroup meetings. Participation is open to all members of the Dronecode Foundation. It is a mature community with a proven ecosystem of tools and services.
Why adopt open source?
Choosing to adopt a robust and mature open-source community, like here at DF, can help organizations and developers get started quickly, thanks to the vast tools and rich feature set already available from decades of architectural improvements, critical safety considerations, the many challenges that we overcame that helped us get to where we are today, as well as a continuously growing ecosystem of hardware options to choose from.
Speaking of mature and proven, the 6th-generation of Pixhawk flight controller of open standards is now available, including several hardware products already being manufactured. But, first, what is Pixhawk?
Pixhawk Open Standards
Pixhawk is not a specific product; it is a set of open standards endorsed by major semiconductor manufacturers, software companies, and drone engineering companies. These de facto standards cover requirements for many aspects of hardware and electronics design in drones. The Pixhawk Special Interest Group is in charge of developing the latest standards through recurring public meetings hosted by the Dronecode Foundation.
The Open Standards are implemented by manufacturers, many of which are DF members, such as Auterion, ARK Electronics, Holybro, ModalAI, CUAV, 96Boards, and NXP Semiconductor. They release products or reference implementations for end-users or other organizations, all based on the Pixhawk standards. The Pixhawk ecosystem has been growing for over a decade and has achieved great success. We estimate more than a million Pixhawk-based devices in the field as of this writing.
FMUv6X & FMUv6C—Sixth Generation Pixhawk’s
Now, the 6th generation of Pixhawk FMU’s is available in two versions:
- FMUv6X: the high-end version made for performance and reliability (see features below)
- FMUv6C: made for the cost-conscious end of the market. Reliable and cost-effective
Every version of Pixhawk ships with the latest supported version of the PX4 Autopilot (v1.13) by default.
Which companies are making hardware for Pixhawk 6th gen?
As of this writing, four companies are manufacturing hardware utilizing the Pixhawk 6 standards
- Auterion – Skynode
- Holybro – Pixhawk 6X & Pixhawk 6C
- CUAV – CUAV Pixhawk FMUv6X
- ARK Electronics – ARKV6X
In addition, some companies are creating new baseboards with companion computers, such as Raspberry Pis, and Nvidia Jetson’s that run Linux, allowing you to use an API instead of modifying the PX4 Flight Controller code. This increases the availability of options and showcases how innovation can build on top of open-source technology. Companies offering baseboards with Pixhawk Autopilot Bus compatibility include:
- Auterion – Skynode, and AI Node
- Holybro – Default, Mini, RPi CM4
- CUAV – Default
- ARKElectronics – Default
How are the new Pixhawk standards making a difference?
Let’s go straight to those who are offering new products utilizing these standards and see how the enhanced standard is making more possible.
“Auterion is continuously supporting Dronecode, and its projects, our commitment to open source and standards is part of our DNA. At Auterion, we take the invaluable work of a community of innovators, we integrate it with different services that create value for the end user, and deliver it to the wider market as an enterprise-ready product. The newest generation of FMUv6X is another great advancement, and we are looking forward to the value it will bring our customer base in future release cycles”
Lorenz Meier, co-founder and CEO of Auterion
“CUAV Pixhawk 6X is the result of close cooperation between CUAV and Dronecode. We implemented the mature and reliable FMUv6X open standard. CUAV has leveraged its in-house hardware design expertise to create a unique autopilot with very reliable sensors (IMU, barometer, RM3100 magnetometer) and a new shock absorption system. This makes it possible to extend its use to more industrial fields, making your imagination possible.”
Ray Bin, Founder and CEO of CUAV
“The ARKV6X flight controller is the perfect combination of advanced technology and versatile design, offering users the best of both worlds. Open standards are the foundation of a healthy and innovative industry, allowing for collaboration and progress without the constraints of proprietary technology.”
Alex Klimaj, Founder of ARKElectronics
“The Holybro Pixhawk 6X and Pixhawk 6C Flight Controllers have implemented the FMUv6X and FMUv6C open standards. We have followed the Pixhawk standards since 2018 and have continued to work closely with the PX4 Team and Dronecode to improve on them. It is great to see how far we have come with all the companies joining in on this effort to benefit the community as a whole.”
Vince Poon, CTO of Holybro
“From the very beginning our system was built with the Pixhawk flight controller at its heart. Upgrading to v6 will allow us to take the Sunflower Labs Beehive to a new level of autonomy, reliability and flexibility to meet our customer’s needs. The increased redundancy, computing power, hardware standards and incredible community support makes this an easy decision. We are proud to support and contribute to Pixhawk and the community that built it.”
Alex Pachikov, CEO at Sunflower Labs
Enabling a Pixhawk Ecosystem



Pixhawk Autopilot Bus Verification by Dronecode
Additionally, Dronecode can help validate standards implementation to guarantee cross-vendor compatibility of PAB modules and baseboards, enabling an ecosystem. For a small fee, we can help verify your implementation is up to standard; we test against a known reference implementation and verify cross-compatibility with other validated hardware available to us. After all, cross-vendor compatibility is a crucial benefit of using open standards.
How can manufacturers adopt the standards and become part of the community?
Are you interested in how to build your own drone flight controller utilizing the Pixhawk standards? You have a couple of options.
Build your own using the Open Standards
If you would like to adopt the standard, start here, join the DF Discord channel, and participate in the monthly coordination calls for the FMU workgroup.
The best way to contribute to the open efforts hosted under the Dronecode Foundation is to become a member. By becoming a member, organizations can help support open standards and guarantee the continued success of the open-source projects hosted under our umbrella. Join The Dronecode Foundation Today.
The standard is now available for everyone to download
- All Pixhawk FMUv6 Open Standards on GitHub
- DS-010 Pixhawk Autopilot Bus (PDF)
- DS-012 Pixhawk FMUv6X (PDF)
- DS-018 Pixhawk FMUv6C (PDF)
Partner with a verified Pixhawk manufacturer
You can partner with manufacturers who are experts (who contributed to the development of the standards). They include: Auterion; ARKElectronics; Holybro; and, CUAV. All hold a Dronecode membership and help to maintain the standards.
Design your own using the reference Schematics
In either case, an exclusive benefit for Dronecode Foundation members is access to the reference schematics. Leverage access to the reference implementation of the open standards and boost your time to production.
Access to the Pixhawk Trademark
Once your flight controller is market-ready, Dronecode can help you access the Pixhawk trademark to help you demonstrate your Pixhawk standards-compliant hardware is tested as 100% compliant. It is an exclusive benefit for Dronecode members at an additional cost. If you are interested in exploring any of the Pixhawk services (Validation / Access to Schematics / Trademark License) we offer and/or joining the Dronecode Foundation, please reach out to Ramón Roche ([email protected]).
About the Dronecode Foundation
The Dronecode Foundation (DF) hosts open-source and open-standard projects and their communities, forming an ecosystem of critical components to the Drone Industry. DF is a vendor-neutral foundation for open drone projects and is part of the Linux Foundation. We work with developers, end-users, and adopting vendors worldwide. DF provides a neutral space for collaboration in the development of open standards between engineers and organizations members of the drone community, nurturing an open ecosystem providing open alternatives of hardware and software components key to the development of Uncrewed Vehicles. www.dronecode.org
About the Pixhawk
The Pixhawk project has provided readily available open standards for drones and open hardware for more than a decade. The Pixhawk SIG was formed to tackle the lack of specifications and guidelines for drone systems development and is supported by Dronecode Foundation members who support Open Standards. Pixhawk is a registered trademark of the Dronecode Foundation. pixhawk.org
]]>
Watts Innovations today joins Dronecode to collaborate with the open-source community. They are the creators of PRISM SKY, which DroneUp uses for drone deliveries. By joining the Dronecode Foundation, they aim to promote the ongoing advancement of open standards for the overall betterment of the industry.
“We are thrilled to announce that Watts Innovations has joined the Dronecode Foundation as a Silver member partner. We understand the importance of standards and open-source development in driving innovation and growth in the drone industry. Through collaboration with the PX4 community and other industry leaders, we aim to shape the future of the unmanned vehicle ecosystem and provide advanced, reliable solutions to our customers. We look forward to contributing to the Dronecode platform and working with the community to drive further innovation and growth in the industry.”
said Bobby Watts, CEO & Principal Engineer
Watt’s products are used everywhere, from the sets of Hollywood to deliveries from retail giants; their drones are trusted by large-scale commercial enterprises where reliability can’t be an afterthought.
Watts Innovations is best known for its excellent hardware, with NDAA-compliant products such as the WATTS Smart LiPo for heavy lift aircraft that leverages DroneCAN, KONTACT, a handheld ground control station harnessing the power of QGroundControl, and the PRISM SKY, the latest iteration of their PRISM platform made for cargo.
Innovation is more than just a part of the Watts name. From its genesis as a garage project to building drones modified to handle unpredictable shooting and delivery environments, it has advanced the field of aerial robotics by answering directly to clients’ needs.
Watch Bobby Watts, CEO of Watts Innovations, on Episode #6 of our podcast Behind The Tech, where he breaks down the importance of standards for the drone industry and their motivations behind embracing open technologies.


NXP’s HoverGames design challenge is back! This time the contest theme is supporting sustainable food production by using mobile robotics technology.
Up to $9500 award money will be sponsored by NXP, and Dronecode Foundation is sponsoring prize winners to attend the PX4 Developer Summit 2023. 1st prize winner of Hovergames 3 will receive complimentary tickets + travel stipend/scholarship for up to 2 people. 2nd and 3rd prize Hovergames 3 winners will get free tickets.
This contest gives developers access to the first release of NXP’s all-new NAVQPlus(NAVQ+) mission computer, which features a Neural Processing Unit (NPU), hardware accelerated multimedia (incl h.265), Edgelock secure element with NFC interface, dual MIPI-CSI camera port, dual Ethernet – “IX industrial” Gigabit Ethernet & “Two wire” 100base-T1 Ethernet, dual CAN-FD, Wi-Fi 6 / Bluetooth 5.1 on board.
Bosch Sensortec is adding a sustainability award to the prize pool this year for applications demonstrating the best use of its sensor AI technology. For example, in a drone or rover application, the presence of volatile sulfur compounds (VSCs) can be used as an indicator for bacteria growth in food crops. The all-new BME688 AI-enabled environmental gas sensor can detect a broad range of gases in the part per billion (ppb) range, and the gas scanner can be customized for sensitivity, selectivity, data rate, and power consumption and can be trained to a specific application using the Bosch BME AI-Studio tool.
100 proposals will be selected to be rewarded with free sensor components and coupons for purchasing the drone/rover hardware bundle.

Learn more about the contest and apply for hardware before November 21th here: Hardware Application
]]>
Together with our partner communities from OpenCV and Open Robotics / ROS, we put together a long overdue meetup in the heart of San Francisco on August 11th. We were lucky to be met with an incredible response from the community in San Francisco. The event was made possible thanks to Noisebridge and Hackster, who helped us provide great content, the venue, food, and beverages for our guests.
We are kicking off the meetup doors are open at @noisebridge join us pic.twitter.com/ehMPzsVvIZ
— Ramon Roche(@mrpollo) August 12, 2022
Katherine Scott from Open Robotics was our host for the night. She thanked our guests and introduced us to our speakers for the day. Our GM Ramón Roche followed Kat, who presented the PX4 Autopilot demonstrating the multiple capabilities through example applications by commercial adopters. Ramón was followed by Phil Nelson, Director of Content and Creative at OpenCV and co-host of OpenCV Weekly. Phil gave a fun and engaging talk guiding us through the multiple contests at OpenCV and all the great things happening with computer vision development in their community. He was followed by the excellent Alex Glow, robot nerd, and host of Hackster Cafe. She gave us a tour of the Hackster community platform and the many projects she’s worked on, including her adorable robotic companions who stole our hearts that evening. Lastly, our host and chief troublemaker, Katherine Scott, took the stage. She gave a quick overview of the latest and greatest ROS developments and demoed the new development platform, the Turtle Bot 4.
After the main speakers, we hosted a show and tell from our guests, who showcased terrific projects using open source, including Lauren Young from ModalAI, who presented their latest platform, VOXL2, and other guests with their robotics projects.
Events like this are vital to bringing the community together and inspiring developers. Seeing what everyone is working on in-person sparks new ideas, and a single spontaneous conversation can provide solutions to problems teams have been facing for months. With the Open Robotics, OpenCV, and PX4 developer communities collaborating on events like this, we set an excellent precedent for the future development of autonomous systems.



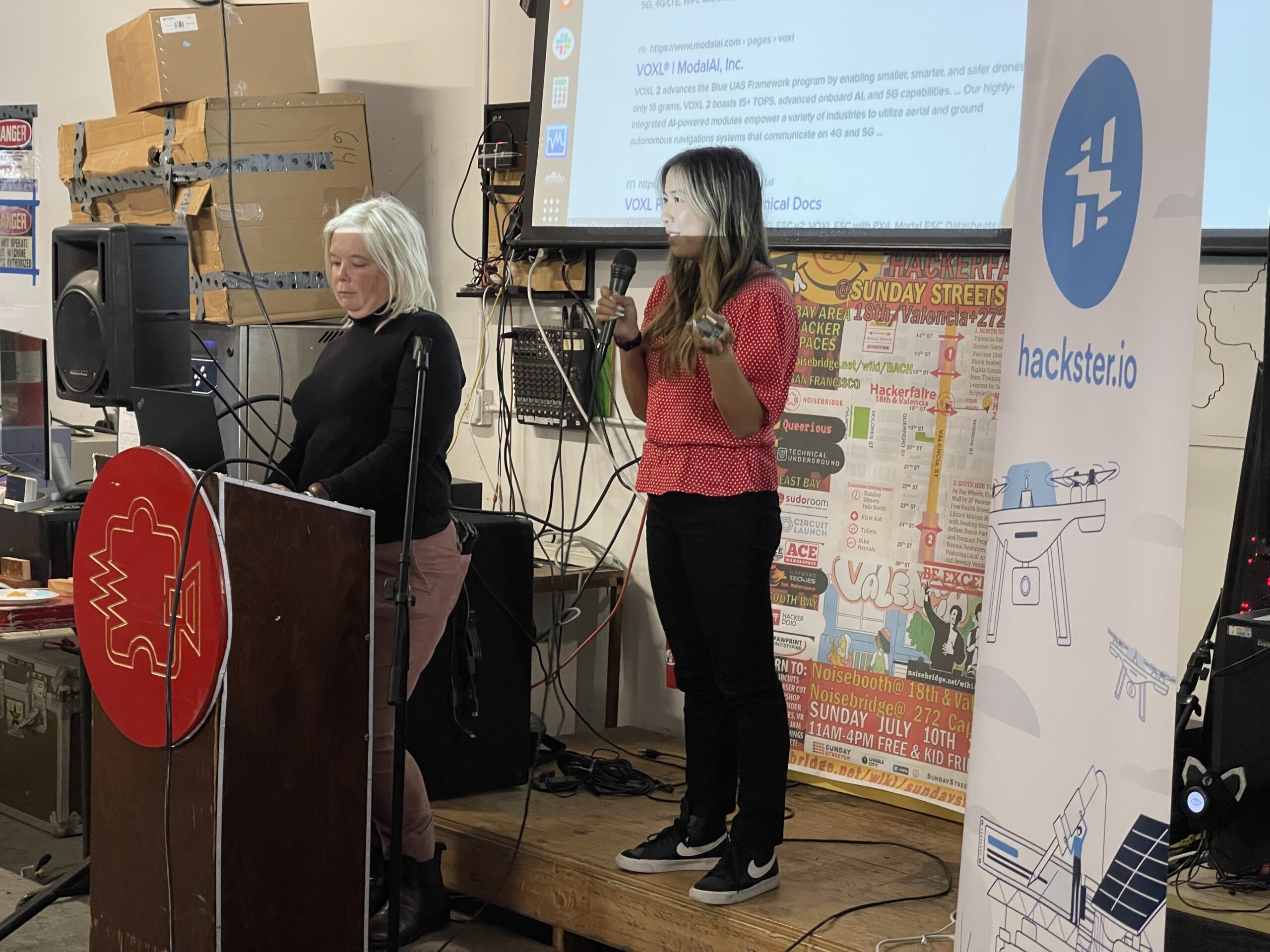

This is just the first of many meetups to look forward to! We’d again like to thank Noisebridge and Hackster for making this meetup possible in the first place, and we look forward to seeing you all at the next one! The Dronecode Foundation is excited to collaborate with the Open Robotics team on more upcoming events, including meetups and conferences in Japan, Chicago, and San Diego.
Join us in Japan for ROSCon 2022
Dronecode Foundation is proud to sponsor ROSCon 22, the ROS yearly event for its worldwide community happening in Kyoto, Japan, October 19-21. Are you planning to attend? Let’s meet up.
]]>“Joining the Dronecode Foundation as a Silver Member allows us to help the community extend PX4 components to work in safety-critical applications, including ultimately human-carrying aviation such as air taxis,“ said Chris Anderson. “We plan to contribute and work with the community to expand PX4’s codebase to handle the distributed and modular sensor systems that eVTOLs demand and improve its overall security and reliability,” he said.
Chris Anderson COO & Chief Product Officer at Kittyhawk
Kittyhawk is currently working on what will be the first commercial air taxi. The H2 has proven in trials its ability to fly at speeds up to 180 mph for distances ranging as far as 100 miles. In 2020 they joined the Air Force Research Laboratory’s AFWERX Agility Prime program, which has helped it accelerate testing.
It currently has 16 H2s which have covered thousands of miles over hundreds of flights between them. Kittyhawk targets a travel cost of less than $1/mile, less than rideshare services, truly disrupting transportation as we know it.

Kittyhawk sponsored the PX4 Developer Summit 2022, which took place June 23-24 in Austin, Texas, and online virtually. Their engineering team led sessions at the show, including Federated PX4 with Ian Dougherty and BoF: Model-based Control in PX4 and High(er) Fidelity Simulation with Gabriel Bousquet.
]]>The #PX4DevSummit 2022 was produced by the DF in partnership with the Linux Foundation Events Team, and special thanks must go to the events team for their support and attention to detail to make the event run smoothly.



This year’s keynotes featured guest speakers highlighting PX4’s place in the larger open-source ecosystem and the drone industry, opportunities for growth and business, and the roadmap for the PX4 ecosystem. Keynote speakers included (in order of appearance) Ramón Roche, General Manager, Droneode Foundation, Hilary Carter, VP Research at The Linux Foundation, Hyon Lim, CEO and Co-Founder of UVify, Dr. Lorenz Meier, Founder of the PX4 ecosystem and CEO and Founder of Auterion, Brian Behlendorf General Manager, OpenSSF, Markus Achtelik Vice President. Engineering, Auterion, and Michael Blades Senior Director, Platforms, DroneUp.
With the help of a content committee formed by leaders from our community and sponsors, we put together a program with 40+ sessions, including eight keynotes and two workshops led by more than 50 speakers representing the best from our community.
Day 1 closed with a drone light show brought to us by 300 UVify IFOs over the skies of Austin, with attendees and onlookers captivated by the fleet of UAVs aligning into delightful 3D formations like TUX the Linux penguin and pride-filled “We Love Open Source” message.

The in-person event featured top-notch networking with parties hosted by Auterion and Guinn Partners. Capital Factory and Guinn Partners invited attendees to the Center for Autonomous Robotics located on the edge of Lake Austin to tour the facilities and check out the robotics labs and fields on site.
Once again, we want to thank the attendees of the summit and everyone who helped us put this event together. And one last thank you to our sponsors who went above and beyond this year, Auterion, UVify, NXP Semiconductors, Holybro, Kittyhawk, Modal AI, Technology Innovation Institute, TDK InvenSense, CUAV, and Guinn Partners.
What was your favorite moment? Let us know on social media using the hashtag #PX4DevSummit
The videos from the conference will be published on the PX4 Autopilot YouTube channel daily, starting with Dr. Lorenz Meier’s great Keynote on Day 1, published today.



This past week, we lost our dear friend, colleague, and true champion of the open source community. Stone White passed away suddenly in the company of his family.
Stone was a wonderful human being and a strong supporter and believer of our open source community. He believed open-source could be used to build a better future through collaboration by allowing everyone to participate.
Many of our community members worked with him through his efforts; most prominently, he led the translation of all of our documentation and QGroundControl into Chinese. Contributions that helped thousands of people and will continue to do so.
You will be forever missed, Stone.
Sharing Memories
Please submit a pull request on Github here if you want to leave a memorial message for Stone. We will ensure his family gets a copy of the messages from our community.
Memorial Fund
Dronecode has arranged with his family to establish a memorial fund to support them. Donations can be made to his family here.


Blog sponsored by Auterion, PX4 Developer Summit 2022 Sponsor
Pixhawk and PX4 are now ubiquitous drone technologies. They help create an ecosystem of interoperability which leads to users having more choice and flexibility. Creating an open drone ecosystem around these technologies was the goal, and it’s finally happening!
This blog post highlights what the Dronecode Foundation and its member companies, like Auterion, are facilitating in conjunction with the open source community for real companies and end users.
Building the Foundation
The intention behind the creation of Pixhawk was to make drones fly autonomously using computer vision. But the drone computing power and technology we take for granted today didn’t exist in 2008. Auterion’s now CEO, Lorenz Meier, was a student at the time and set out to build the necessary flight control software and hardware. Realizing the task’s scale, he sought the help of fourteen fellow students, many of whom were more experienced than him, to make it happen.
Together, they not only built Pixhawk but kick started an open source community around various technologies. Lorenz enabled talented people worldwide to collaborate and create a full-scale solution that was reusable and standardized. By giving their technology a permissive open source license, they opened it to everyone for use and collaboration.
A lot has happened since then. Here are a few milestones:
- 2011: Birth of PX4
- 2014: Dronecode Foundation Creation
- 2019: MAVSDK now under MAVLink project
- 2021: Launch of Pixhawk Payload Bus Standard
- 2022: Dronecode Foundation has over 33 participating members
Benefits of Openness in the Real World
There are proprietary drone solutions out there but the innovation and technological backbone are thanks to open software hardware and standards. It took a while to get here, but we’re at a point where the benefits of an Open Ecosystem are visible and growing fast.
Companies now see the benefits of using open technologies and what was a foundation for the drone industry, is being infused into every crevice.
Here are two interviews with companies discussing the benefits of standardization and an open ecosystem in the real world.
Freefly Systems
Max Tubman from Freefly Systems discusses open standards and how it is enabling interoperability of various payloads amongst partners in the Open Ecosystem.
Watts Innovation
In this interview, Bobby Watts of Watts Innovation, explains the power of standardization and how it has streamlined their interoperability with other ecosystem partners like Gremsy and Drone Rescue Systems.
The Dronecode Foundation is vital to a healthy open drone community and the developer community is key to its success and agility. Auterion believes open source is the winning approach to building software, including drone software and that companies need to work in tandem to create the best technologies.
Auterion’s Role
Open source was always a part of Lorenz’s vision but he wanted to make it sustainable and scalable long term. That’s why, in 2017, he and Kevin Sartori launched Auterion; a company committed to maintaining the open source ecosystem and distribution model, that supports other companies to use it in their products and services.
Open source and standards form the technical foundation of the drone industry, but it needs a little more work to be made ready for end users. That’s where Auterion and other companies come in, with open source at the core of what we do.
Auterion brings the fantastic work of a global open source developer community around PX4, MAVLink, and other projects and puts them into a productized form that we maintain for end users so they can focus on their business. By making open source software as easy to adopt as a commercial product, it removes barriers for the enterprise users.
The Open Ecosystem enables a symbiotic relationship between developers and the enterprise, bringing the best out of both worlds. A lot of Auterion’s work flows back into the open source community and enables those developers and technologists to make the next move: to build a rover, a VTOL or a more interesting drone configuration.
]]>
During those years, the industry has faced multiple challenges, and our community has pitched in to help solve the most complex aspects of managing aerial vehicles. We plan to continue working with our members to support the industry by keeping open technologies aligned with current industry needs, looking beyond what lies ahead, and providing new opportunities and solutions.
The PX4 Autopilot revolutionized the landscape thanks to its innovative software architecture by providing a real-time-based modular design with a publish-subscribe-based middleware layer. The project has rapidly evolved from a flight stack to an ecosystem of open tools and projects that further strengthen the benefits of PX4, with Open Standards such as the Pixhawk FMUv5X, and Payload Standard taking center stage in shaping the next wave of development and manufacturing.
Our focus on creating accessible technology lead us to expand on the Pixhawk lineup of open hardware by forming workgroups with some of our most active members. Over the last twelve months, together with our partners, we released the first standards from the Pixhawk workgroup, confirming our commitment to supply the broader drone industry with impactful open technologies:
“PX4 is providing a widely adopted autopilot solution for a global development community including enterprises, academia, and developers. We have always co-developed hardware standards, initially by creating the Pixhawk autopilot. We are now building on that success with more hardware standards that cover“
Lorenz Meier, Chairman of the Droneco de Board of Directors, and Founder of Auterion
What’s in store for 2022 and beyond
First, we are expanding our efforts on open standards, doubling down on the work we have been carrying out over the last two years. We strongly believe standards are the way forward for our industry, and we want to open the doors to any organization to collaborate with us.
Next, with the extra responsibility involved in leading the open standards expansion effort, we are delighted to announce that Ramón Roche will be taking the General Manager role under the stewardship of the board of directors. Ramon will ensure our mission remains aligned with the greater industry and help grow our fantastic community, affirming our commitment to the industry.
We look forward to meeting face-to-face with our community in June for the PX4 Developer Summit, where we will be sharing our in-depth plans and progress in the company of our members and many outstanding companies from our ecosystem.
]]>“The drone industry has a massive impact on multiple commercial and industrial verticals, helping automate and derisk jobs, enabling businesses to offer life-changing technology. Organizations are looking at open technologies to help them reach their goals faster and safer, leading to the mass adoption of open source,” said Roche. “As the new general manager of the DF, I am determined to continue expanding the community and supporting the industry in the adoption of open source.”
Ramón Roche, General Manager, Dronecode Foundation

After five months of product development, the team at Viewpro is finally ready to launch this powerful 4K dual-sensor drone gimbal camera – Q20KTIR.
Viewpro focuses on research and development to meet the extensive requirements of industrial drone applications.
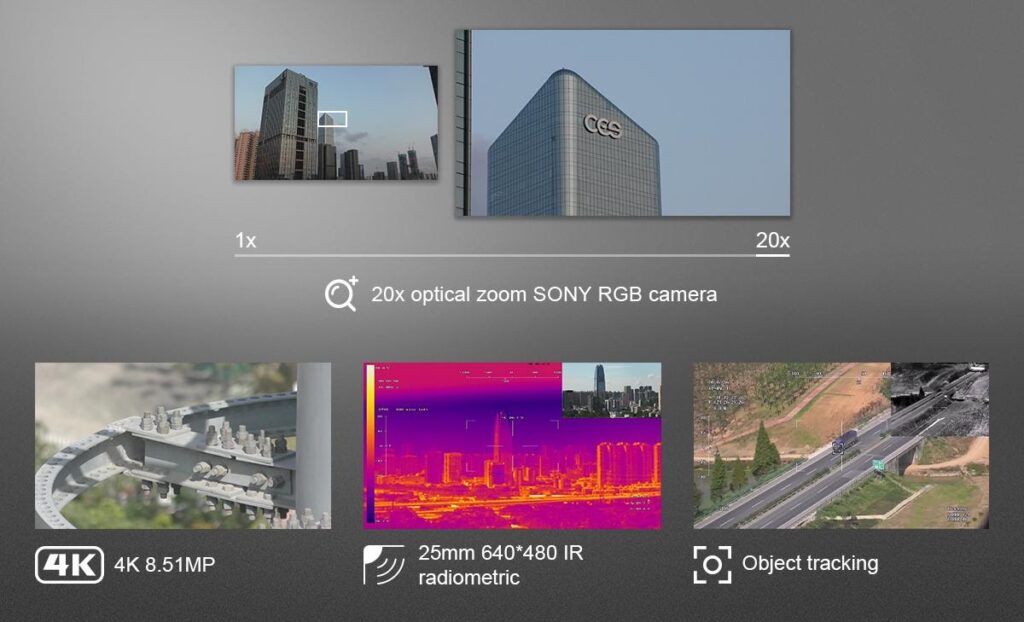
Like other Viewpro gimbal cameras, Q20KTIR is MAVlink compatible, features lightweight, high compactness, and multi-function.
- EO: SONY 1/2.5″ “Exmor R” CMOS module
- 20x Optical Zoom, 30x with super-resolution
- 4K Output and Storage
- IR: 640*480 25mm IR thermal camera
- Object tracking on both EO and IR camera
- Output: HDMI / IP
- Control method: PWM/S.BUS/TTL/TCP
- Compatible with Viewport and Viewlink
- NW: 883g
They are designed for surveillance, search and rescue, inspection, environment investigation, and surveying in various domains such as defense & security, firefighting, environment protection, energy, infrastructure, and many more applications.
We are guided by customer needs and manufacture high-quality gimbal cameras to fulfill the daily updated market requirements. We are positively willing to share and exchange with other members in Dronecode Foundation, carry out more extensive cooperation, and make progress together.
by Steven Xue, founder of Viewpro.
For more information, please visit:

The #PX4DevSummit 2021 was produced by the DF in partnership with the Linux Foundation Events Team.
This year we were honored by 800 registrations from our fantastic community, making this event the largest we have hosted in our short three-year lifespan.
With the help of a content committee formed by leaders from our community and sponsors, we put together a program with 45 sessions, including 4 keynotes, by 50 speakers representing the best from our community.
Dr. Lorenz Meier gave a fantastic opening keynote, taking us through the biggest wins in our ecosystem during the 12-months between summits, and reminded us of the importance of our contributions.
During the summit, we announced the release of the latest Pixhawk FMUv5X open standard and the availability of the Pixhawk 5X by Silver Member Holybro.
We closed the two days with a daring virtual after-party thanks to DJ Aebledee, who played for us, for the perfect end to our celebration.
We want to thank the attendees to the summit and everyone who helped us put this event together.
What was your favorite moment? Let us know on social media using the hashtag #PX4DevSummit
Don’t forget all of the talks have been uploaded to the PX4 Autopilot YouTube channel, where you can watch them all at your convenience.

Thank you, Sponsors & Partners
This event was made possible thanks to the enormous support from our Sponsors and Partners.
Diamond
Platinum
Gold
Silver

Students and Academia Scholarship
After-Party Sponsor
T-Shirt Sponsor
Media Partners





The Latest member of the Pixhawk FMU Family
The new generation of Pixhawk FMU brings the proven features from previous generations to a hardened form factor. We are building on top of the battle-tested functionality of the FMUv5, with a modular design and triple redundancy.
Enabling extensibility and cross-vendor compatibility
The new modular design of the Pixhawk FMUv5X Open Standard features a System-on-Module (SOM) thanks to the Pixhawk Autopilot Bus (PAB). The SOM design allows for the development of baseboards that can extend the functionality of Pixhawk to include companion computers or customized form factors from vendors—guaranteeing cross-compatibility between manufacturers who follow the standards.
The FMUv5X delivers incredible performance and reliability, thanks to the STM32F7 and the unique sensor sets available for the standard, including sensors from Bosch®, and InvenSense®, giving you the flexibility to control any autonomous vehicle.

Proven Hardware Interface
- Secure element for secure authentication of the drone
- Ethernet interface for high-speed mission computer integration
- Three redundancy domains: Completely isolated sensor domains with separate buses and separate power control.
- It has redundant sensors on separate buses, allowing parallel and continuous operation even in the event of a hardware failure.
- Some of the possible sensor configurations:
- Bosch BMI088 accelerometer (vibration isolated)
- Invensense ICM-20602
- TDK Invensense ICM 42688-P
- Bosch BMM150 compass (vibration isolated)
- Two Bosch BMP388 pressure sensors
- GPS external mag + baro #1
- GPS external mag + baro #2
- Calibration EEPROM for baseboard sensors
- On-IMU calibration EEPROM memory for high-accuracy sensors
- Automated sensor calibration eliminating varying signals and temperature
- FRAM memory for configuration data
- Operating temperature -40 to +85°C
- Extensive power monitoring
- Two smart batteries on SMBus or more on UAVCAN
- 5V rail monitoring
- 3.3V rail monitoring for CPU
- 3.3V rail monitoring for each sensor domain
- External sensor bus (SPI)
- Redundant power supply: The autopilot can be powered from up to two power sources and every sensor set is powered by an independent LDO with independent power control
- Battery-backed real time clock for running security applications without GPS coverage
- NFC reader support
Fully compatible with PX4 Autopilot
The FMU5X Open Standard is fully compatible with the latest release of the PX4 Autopilot (v1.12), allowing for bigger workloads and task-intensive applications, providing a stable and safe baseline for manufacturers who wish to implement the standard—offering complete compatibility with our ecosystem of open source projects.
The first implementations are now available, more available soon
Auterion Skynode

- Integrated Mission Computer
- 4x Redundant IMU sensors
- Built-in Ethernet, USB, WiFi, 4G
- Auterion Enterprise PX4
Learn more https://auterion.com/drone-manufacturers/skynode/
Pixhawk 5X by Holybro

- Vanilla FMUv5X implementation
- Ethernet
- System-on-Module design
- Robust baseboard with multiple connectors, drop-in replacement for a Pixhawk 4
Learn more http://www.holybro.com/product/pixhawk-5x/
Made possible thanks to the Pixhawk SIG
The DS-011 standardization process took over twelve months of development, with contributions and participation from Dronecode Foundation members within the Pixhawk Special Interest Group during the FMU Workgroup meetings.
Dronecode Foundation members develop Pixhawk Open Standards to drive interoperability of the drone ecosystem through open-source. The DF facilitates an open process to develop open standards. The standards enable multiple implementations to be delivered into the market to benefit users and developers by enabling choices in a marketplace.
The standard is now available for everyone to download
Visit Pixhawk.org to Download the Standard
Have any questions regarding the spec, or want to help us build the next generation of Pixhawk? Join the monthly coordination calls from the FMU workgroup, organized by the Dronecode Foundation.
The best way to contribute to the open efforts hosted under the Dronecode Foundation is to become a member. By becoming a member, organizations can help support open standards and guarantee the continued success of the open-source projects hosted under our umbrella. Join The Dronecode Foundation Today.
About the Dronecode Foundation
The Dronecode Foundation (DF) hosts open-source and open-standard projects and their communities, forming an ecosystem of critical components to the Drone Industry. DF is a vendor-neutral foundation for open drone projects part of the Linux Foundation. We work with developers, end-users, and adopting vendors from around the world. DF provides a neutral space for collaboration in the development of open standards between engineers and organizations, members of the drone community, nurturing an open ecosystem providing open alternatives of hardware and software components key to the development of Uncrewed Vehicles. www.dronecode.org
About the Pixhawk
The Pixhawk project has provided readily available open standards for drone and open hardware for more than a decade. The Pixhawk SIG was formed to tackle the lack of specifications and guidelines for drone systems development and is supported by Dronecode Foundation members who support Open Standards. pixhawk.org
]]>As our world becomes increasingly digital with a greater reliance than ever on sophisticated technology such as AI and autonomous drones for everything from reconnaissance missions in security industries to drone delivery of groceries and pharmaceuticals, one thing is clear. This is a world that will require us to update our know-how on an almost continuous basis to ensure we are able to maximise the gains from such technology.
Secure Systems Research Centre (SSRC) is one of the seven initial dedicated research centres of the Technology Innovation Institute (TII), a global research hub and applied research arm of Abu Dhabi’s Advanced Technology Research Council (ATRC), the overarching entity mandated to drive the R & D priorities and shape a research ecosystem in the UAE.
At SSRC, our work in advanced autonomous systems, cyber-physical systems and in shaping smart cities means we are more aware of the hyper-connected world we live in today. As part of our core mandate, we pursue applied research in building a more secure tomorrow and helping the global community realise the true potential of the 21st century.
One of the systems we are actively focused on in our research endeavours is the PX4 Autopilot system, with a view to ensuring its security and resilience. We headlined a presentation at the virtual PX4 Development Summit titled ‘Toward a more secure, resilient, and safer PX4 Autopilot system’. The focus of the presentation was on how to use the PX4 Firmware to enable drone security research and to outline the basic security improvements that are being developed for encryption, memory protection, and more secure hardware.
Unsecure drone systems can pose threats to our privacy, cyber security, and our physical safety. SSRC is keen to improve the current drone platform to make it more secure, resilient, and safe for hobbyists, commercial entities, and governmental authorities to use. Our aim with this presentation was to highlight how to use the PX4 Firmware to enable drone security research. We also outlined the basic security improvements that are being developed for encryption, memory protection, and more secure hardware.
In addition, SSRC presented a security-enabled hardware platform onto which the PX4 Autopilot software was ported to achieve extremely high performance. The hardware platform is based on RISC-V application grade CPU cores, and it is capable of running multiple operating systems in parallel. What’s more, the hardware platform integrates hardware-accelerated cryptography onto a single Security Operations Centre. Porting the PX4 Autopilot onto this new platform enables new exploratory paths in drone software development for SSRC’s research partners. For more information about the presentation, you can access it here.
At Secure Systems Research Centre, as part of our umbrella mission, we are driving end-to-end security and resilience in cyber-physical and autonomous systems that will ensure safety and enrich lives in the UAE and worldwide. To get in touch or collaborate with us, please visit https://securesystems.tii.ae/
]]>
Technology Innovation Institute (TII) is now working directly with our members in the security space, bringing to the forefront their efforts and experience over the years in drone technology.
TII was established in November 2020, and is the applied research pillar of Abu Dhabi’s Advanced Technology Research Council (ATRC). The global research institute works at the intersection of breakthrough technologies to find solutions to the world’s greatest challenges through partnering with top talent from around the world and collaborating with leading academic and scientific institutions.
Comprising seven initial dedicated research centres – Quantum, Autonomous Robotics, Cryptography, Advanced Materials, Digital Security, Directed Energy, and Secure Systems, TII is well equipped to help advance open source community goals.
The Secure Systems Research Centre (SSRC) is focused on enhancing the security and resilience of Unmanned Aerial Vehicle Systems, and helps lead the Security SIG together with Auterion, in working on Cryptography, Memory Protection, and carrying out Code Analysis on the PX4 Autopilot.
“Unsecure drone systems may pose threats to our privacy, to cybersecurity, and to our physical safety. We want to be involved in making the current drone platforms better, more secure, and resilient for the safe use of hobbyists, commercial and governmental authorities,” said H.E. Faisal Al Bannai, Secretary General of ATRC “At TII’s Secure Systems Research Centre (SSRC), we pursue research that is building a more secure tomorrow and helping the global community realise the true potential of the 21st century. We look forward to working closely with the Dronecode Foundation to significantly enhance the resilience and security of drone systems.”
said H.E. Faisal Al Bannai, Secretary General of ATRC
TII’s Secure Systems Research Centre is also participating in the Hardware Work Group, helping to advance the newly released Pixhawk open standards.
“As part of our endeavour to shape a global centre of excellence in the development of end-to-end security and resilience for cyber-physical and autonomous systems, SSRC is committed to the success of PX4 and Pixhawk open source as they will enable the pervasive use of drones,” said Dr Shreekant (Ticky) Thakkar, Chief Researcher at SSRC. “In keeping with SSRC’s focus areas across platforms, software, and data integrity, we prioritise the secure fleet management of drones. As Dronecode is setting standards in the drone industry, TII is pleased to collaborate with this foundation.”
said Dr Shreekant (Ticky) Thakkar, Chief Researcher at SSRC.
The Dronecode Foundation is thrilled to welcome TII to our growing community of partner organisations as a Silver member, working closely with its top scientists and community contributors on our Work Groups and Special Interest Groups.
About TII
The Technology Innovation Institute (TII) aims to become a leading global research centre dedicated to pushing the frontiers of knowledge. Our teams of scientists, researchers, and engineers work in an open, flexible, and agile environment to deliver discovery science and transformative technologies. Our efforts ensure that we are not merely preparing for the future, we are working to create it. We are committed to inspiring innovation for a better tomorrow.
]]>
Dronecode Foundation members develop Pixhawk Open Standards to drive interoperability of the drone ecosystem through open-source. The DF facilitates an open process to develop the open standards. The standards enable multiple implementations to be delivered into the market to benefit users and developers by enabling choices in a marketplace. We are happy to announce the release of the Pixhawk FMUv6U Open Standard.
The Latest member of the Pixhawk FMU Family
The Pixhawk FMUv6U Open Standard builds on the battle-tested functionality of the FMUv5 and the newer architecture of the upcoming FMUv5X and adds a slight increase in processing power and High-Speed USB.
Enabling advanced computing opportunities on-board
The addition of the USB-HS support enables implementers of the open standard to think outside the box and expand their creations with extra functionality that wouldn’t be possible before. Manufacturers can augment their offerings with AI or ML components or a robust computer vision pipeline.
Proven Hardware Interfaces
- USB-HS Support
- SMSC-USB2517 (ULPI)
- Redundant sensors on separate buses.
- Bosch BMI088 (SPI3)
- TDK Invensense ICM-42605 (SPI2)
- TDK Invensense ICM-20602 (SPI1)
- Bosch BMM150 compass (I2C4)
- Bosch BMP388 pressure sensor (I2C4)
- GPS external mag + baro #1
- GPS external mag + baro #2
- FRAM memory for configuration data (SPI5)
- Extensive power monitoring
- 5V rail monitoring
- 3.3V rail monitoring for CPU
- 3.3V rail monitoring for sensor domain
- External sensor bus (SPI6)
- For NFC, one external I2C port needs to have an additional GPIO line and 5V to supply the external NFC reader.
Fully compatible with PX4 Autopilot
The FMUv6U takes full advantage of the latest PX4 autopilot feature set, providing a stable and safe configuration for manufacturers who wish to implement the standard—offering complete compatibility with our ecosystem of open source projects.
Made possible thanks to the FMU Workgroup
The Pixhawk FMUv6U Open Standard standardization process took over 12 months of development, with contributions and participation from Dronecode Member companies and the PX4 Maintainers.
DS-016 design Lead by Silver Member Gumstix
Our silver member Gumstix contributed most of the work behind the standard and has included the work on Upverter, their simplified design tool for electronics. You can now build a custom Pixhawk board based on the FMuv6U standard using Upverter.
Recommended Read
Gumstix has the first implementation of the standard available for sale
The CM4 + Pixhawk FMUv6U carrier board supports development, prototyping, or production-grade hardware for new drones and includes the following features:
- STM32H753 MCU
- 2x MIPI-CSI lanes for high-resolution imaging
- BMM150 three-axis geomagnetic sensor
- microSD card slot with isolated CD pins
- USB Type-C port
- 2x FTDI FT232RQ USB to UART interface
- Coral TPU via USB3

CM4 + Pixhawk FMuv6U Backside (Coral) 
CM4 + Pixhawk FMuv6U Backside Top (Raspberry Pi CM4)
The standard is now available for everyone to download
Have any questions regarding the spec, or want to help us build the next generation of Pixhawk? Join the monthly coordination calls from the Payload workgroup, organized by the Dronecode Foundation.
Help Drive the Future of the Drone Industry.
Enjoy the benefits of membership!
The best way to contribute to the open efforts hosted under the Dronecode Foundation is to become a member. By becoming a member, organizations can help support open standards and guarantee the continued success of the open-source projects hosted under our umbrella.
Join The Dronecode Foundation Today.

State of the Community 2021 Survey
Complete the Questionnaire for a 20% discount on our store
Community, the Dronecode Foundation Community Survey is an effort to get to know you better and understand how to serve you best.
We put together a yearly Survey to measure some key metrics, including Inclusion, diversity, project adoption, and learn a few ways to use our projects.
The evaluation is entirely anonymous, we won’t track anything (even your IP), and we will publicly share the data on Dronecode Foundation’s GitHub on a new Repository exclusive for Surveys.
We estimate the Questionnaire takes around 20 min to complete, and we are hoping to get answers to the following questions (in between others):
- We want to know who’s part of our community and what type of company you work for.
- How’s the progress on our projects going, and how are you using them (PX4, MAVLink, MAVSDK, QGroundControl, and Pixhawk.)
- Diversity and Inclusion, are we setting up an inclusive environment for everyone?
- Are we reaching our community through the proper channels?
- What type of content should we focus on?
Ten (10) lucky community members get FREE #PX4DevSummit 2021 Tickets.
As an incentive and thank you for volunteering your time in completing the Questionnaire, we are giving away a 20% discount to our online store to everyone who completes the Survey within the next two weeks and will raffle (10) FREE tickets to the #PX4DevSummit 2021. And as such, you will be asked to enter your personal details on the last page.
Please Note: It’s entirely optional to claim the incentives above, but your data won’t be shared publicly with anyone and won’t be part of the published Survey data. So we are only using your data for:
- Send you your unique discount code.
- Enter you on the raffle for the event tickets.
Take the Dronecode Foundation Community Survey
Click the link below when you are ready to start the Questionnaire. Don’t worry, it will only take a few minutes.
]]>
Get the latest PX4 merch from the official store, and help sustain the open-source Community.
We are finally launching our merch store. After years of only having shirts and decals available at in-person events, usually meetups or trade shows such as InterDrone, or AUVSI Xponential, we decided to host our shop. It’s been our goal for a few months now, and we are happy to have found a great partner to help us with production, warehousing, kitting, and fulfillment (Woah!)
As usual, all of the money we collect will continue to go to the efforts of the Dronecode Foundation to support the open source and open standard projects under our umbrella.
When you purchase a shirt, the new Hoodie, or some stickers, you are giving to a good cause, and as a perk, you will end up looking good too!
But wait, before you stock up!
As a special THANK YOU gift for being a fantastic community, we are running a special launch campaign with a 15% discount code valid until June 11th.
Use code JuneLaunch2021 at check-out
Don’t wait until it’s too late though, we are running limited supply runs, and we will have a rolling cycle of designs coming up every few months.
Now, what are you waiting for? Click the link below to get your gear!
]]> Visit the Dronecode Foundation Store »
Visit the Dronecode Foundation Store »
Our Program Manager wins Airwards Industry Impactor Award.
Congratulations to our program manager Ramón Roche for winning the Airwards People’s Choice award for Industry Impactor. We are delighted to have you among us.
On behalf of the board of directors, I would like to congratulate you and thank you for all your hard work. We applaud the determination and effort you have demonstrated while working for the Dronecode Foundation, championing our cause and the open-source community.
Thank you for your hard work and dedication. We hope to continue being first-hand witnesses of your success.
Dr. Lorenz Meier
Chairman of the Board of Directors, Founder of PX4 Autopilot, and Co-Founder of Auterion.
About Airwards

Airwards is a not-for-profit awards platform dedicated to identifying, recognising and championing positive drone use. The first digital awards platform of its kind to champion positive drone use cases internationally, Airwards is open to a range of individuals and companies, including drone specialists transforming an industry, startups using drone technology for creative solutions, and large corporations driving innovation.
Winners successfully met the Airwards criteria, centred on:
- Innovation: promoting pioneering ideas that are successfully challenging the perception of what a drone is and can be.
- Responsibility: recognizing this key aspect of every drone flight to advocate legitimate behavior as best practice standard).
- Impactful real-world solutions: asking: ‘How are drones making a difference?’ by demonstrating quantifiable outcomes and real-world solutions.
Airwards judges include global leaders, pre-eminent drone experts, and industry specialists curated to reflect the diverse range of innovation and incredible work accomplished by the international drone industry. They are committed to sharing positive use cases and cross-sector knowledge, inspiring different industries to collaborate and innovate, facilitating commercial opportunities, and educating the wider public on drones as safe solutions to real-world problems.
For more information on the Airwards 20/21 winners, visit www.airwards.online/winners20-21/all.
]]>
The multidisciplinary nature of drones brings community members from many areas of the technology spectrum, and our community welcomes everyone by offering an inclusive and accessible space to collaborate. (See our Code of Conduct, and pledge to our community)
I frequently see members struggle in some areas and excel at others. For most, it feels like starting in a totally foreign area. Developing circuit boards and integrating hardware modules onto a board is one of the areas most are not experts.
The Open Source Path
The main benefit of choosing to work with an open-source community is the openness and collaboration across the board. It’s essential to choose a mature community with a proven ecosystem of tools and services that can help you achieve your goals.
When starting drone projects, it is important to understand the challenges you are trying to accomplish. I frequently see many make the mistake of focusing on the wrong problems and eventually see them reinventing the wheel (sort of speak) after having spent vast engineering resources.
Choosing to adopt a robust and mature open-source community can help organizations and developers get started quickly, thanks to the vast tools and rich feature set already available thanks to decades of architectural improvements, critical safety considerations, the many challenges that we overcame that helped us get to where we are today, as well as a continuously growing ecosystem of hardware options to choose from.
Creating the next generation of advanced robotics
For robotics and drones, the computational challenges can be even more significant than the electronics challenges if you don’t have the hardware and firmware support you need. If you’re developing a new drone, you can cut down your development and build time if you can leverage some proven production-grade firmware for your system.
“The PX4 Autopilot is an excellent option to help drone designers develop and deploy proven firmware onto their hardware.”
PX4 is an open-source flight control software for drones with support for many configurations of multicopters, fixed wings, VTOLs, Rovers, and even unmanned underwater vehicles. Its source code contains everything needed to configure a vehicle, run it autonomously and also control it from an external source through an SDK (companion computer, over a telemetry link, or even through the cloud thanks to LTE or 5G).
If you are interested in learning how the PX4 Autopilot works, check out the amazing community-driven documentation, which is kept up to date by volunteers from all over the world at docs.px4.io. The PX4 source code is available on GitHub.
PX4 and the Dronecode Foundation
The PX4 Autopilot is hosted under the Dronecode Foundation. DF is a vendor-neutral foundation for open drone projects part of the Linux Foundation. Our mission is to nurture communities around the open-source projects, and to foster collaboration between the many contributors from the industry to continuously improve the projects.
The Projects under the ecosystem umbrella include:
- PX4 Autopilot Flight Stack
- MAVLink the protocol for drones.
- QGroundControl MAVLink based Mission Planner.
- MAVSDK, the standards compliant SDK for MAVLink.
PX4, together with the rest of the projects hosted under the Dronecode Foundation, gives creators a proven solution that can be immediately deployed for prototyping or production. This ecosystem provides an open-source solution for building solutions thanks to its modular architecture, developers can easily add hardware components without requiring major redesigns to the code architecture or losing core functionality.

The Dronecode Foundation offers a rich set of critical components for Drone Developers
Pixhawk Open Standards
Pixhawk is not a specific product; it is a set of open standards endorsed by major semiconductor manufacturers, software companies, and drone engineering companies. These de facto standards cover requirements for many aspects of hardware and electronics design in drones. The Pixhawk Special Interest Group is in charge of developing the latest standards through recurring public meetings hosted by the Dronecode Foundation.
The Open Standards are implemented by manufacturers, many of which are DF members, such as Auterion, Holybro, ModalAI, CUAV, 96Boards, NXP Semiconductor. They release products or reference implementations for end-users or other organizations, all based on the Pixhawk standards. The Pixhawk ecosystem has been growing for more than a decade and has achieved great success. We estimate more than a million Pixhawk based devices in the field as of writing.
Designing Compatible Drone Hardware
Designing and choosing the right components can be underwhelming when you have so many options, but luckily new open programs by the DF and new design tools by our members make it much easier to build a PX4 compatible drone.
Even if you’re not a PCB designer, you’ll still need a circuit board to hold all your electronics, and you’ll need to have it manufactured. If you want to innovate alongside significant players in the drone industry, it’s best to work within the Pixhawk Standards, as they have seen tremendous success and become an industry benchmark. As such, you’ll either need to purchase an existing solution or design your own board to support a PX4-based drone.
Here’s some of the options you have when adopting the Pixhawk Open Standards to design a PX4 compatible drone.
Manufacturing your own implementation
Dronecode Foundation members that are part of the Pixhawk Special Interest group and actively participate have access to the resources needed to manufacture hardware based on the latest Pixhawk Open Standards. The Dronecode Foundation will work with it’s members to certify compliance with the standards, and help them go to market, helping you navigate the Pixhawk trademarks and the many licensing options available.
Interested in becoming a member? Apply online today.
Building a Custom Board using Upverter
Another straightforward option to design a board without a DF membership, that doesn’t involve buying an expensive design application, or learning PCB design is to use the modular design tools in Upverter Modular thanks to our Silver Member Gumstix.
Everything in Upverter Modular happens in your web browser, and the drag-and-drop interface makes it simple to add hardware onto a circuit board. Upverter Modular works using multiple hardware modules with standard interfaces, where the electrical connections between different modules are created automatically.
You don’t need to worry about routing or signal integrity as you create your drone board. Instead, you can worry about designing the features and functions you want in your new system.
To get started in Upverter Modular, you can jumpstart your design from reference templates or open up a new board and search for a Pixhawk module. You can then drag this module into the board layout. This module includes all the hardware you need to support the PX4 Autopilot:
An example of a supported sensor set:
- STM32H753 Processor
- USB3300 USB Hi-Speed Transceiver
- FM25V02A 256Kb FRAM
- InvenSense ICM-42605 6-axis IMU
- InvenSense ICM-20602 6-axis IMU
- Bosch BMI088 6-axis IMU
- Bosch BMM150 Magnetometer
- Bosch BMP388 Barometer
To finish up the board, just add a power regulation module and any other cameras, sensors, or other components you want on the board.

The image below shows an example board we created in Upverter using the NVIDIA Jetson TX2 COM. This board is ideal for image capture and processing directly on the drone, thanks to the onboard Jetson COM.
Pixhawk Reference Implementations
Gumstix CM4 + Pixhawk FMUv6 Board
For a prepackaged PX4 compatible board with additional features and embedded AI capabilities, check out the Gumstix CM4 + Pixhawk FMUv6U. This board follows the Pixhawk FMUv6U Open Standards and includes an SMT32 MCU that supports the PX4 Autopilot.
It also lets you build more extensive applications using the new Raspberry Pi CM4 module as the companion computer and a Coral TPU from Google, which supports advanced computer vision applications. Gumstix is the first manufacturer to implement greater than USB 2.0 speeds between the Raspberry Pi CM4 module and the Coral Accelerator module. This allows for faster inferencing and improved performance.
This board is a great tool for building a production-grade autonomous drone platform with custom applications using the PX4 Autopilot.
The CM4 + Pixhawk FMUv6U carrier board supports development, prototyping, or production-grade hardware for new drones and includes the following features:
- STM32H753 MCU
- 2x MIPI-CSI lanes for high-resolution imaging
- BMM150 three-axis geomagnetic sensor
- microSD card slot with isolated CD pins
- USB Type-C port
- 2x FTDI FT232RQ USB to UART interface
- Coral TPU via USB3
Customize Your Own CM4 + Pixhawk FMUv6 Board
If you want to create your own CM4 + Pixhawk FMUv6 carrier board for a new drone, Upverter Modular lets you customize your own version of the Pixhawk board. You can add modules, change the board shape, modify the component arrangement, swap out the CM4 connector for a different COM, and quickly place an order for your customized Pixhawk board.
In addition to the drone hardware options listed above, Upverter’s drag-and-drop interface gives you access to a range of other modules for wireless communication, sensors, digital interfaces, and much more.
These modules and other hardware can be grouped with the PX4 module to satisfy the Pixhawk standards for drone hardware. If you’re ready to start designing electronics for a new PX4 drone, try using the drag-and-drop board design tools in Upverter Modular. You’ll have access to a range of industry-standard COMs and popular modules to create a new prototype board or production-grade customized FMU for your next drone project. You can design your own carrier board based on the FMUv6U carrier and instantly place it into production.
“Try out the new Board Builder to get started for free. It’s never been easier to create production-grade hardware online.”
The advantage of open robotics
There are many options when it comes to building a robotics project, and at the Dronecode Foundation, we are working hard to keep an open option available by building a sustainable ecosystem that hosts developers, manufacturers, vendors, service providers, and end-users. Our efforts can be easily measured by the huge impact we have on the Drone Industry, from the first open hardware flight controllers to the cutting-edge rich feature set of PX4 and the vast tools for developers and makers.
- An unmatched ecosystem.
- A community of Thousands of developers
- Millions of Pixhawk devices in the field
- A flagship yearly event for developers
- Multiple industry events where you can meet the community
Take advantage of the opportunities our network of projects and developers have to offer, and become part of our community.
Help Drive the Future of the Drone Industry.
Enjoy the benefits of membership!
Help us on our mission to enable the industry to build and run safe and scalable drone applications in modern and trusted hardware solutions. The technologies hosted under our umbrella empower developers to produce reliable projects in an open ecosystem.
By becoming a member, you help sustain the day-to-day operations of the open-source community and the Foundation.

The Dronecode Foundation is happy to bring back the PX4 Developer Summit Online on September 14 – 15. After great success in 2020, we are back with the third iteration of our flagship event for the PX4 Autopilot community.
Please visit the official website of the event.
The PX4 Developer Summit is the perfect opportunity to network, learn, and interact with adopters and end-users of our projects. We put together a comprehensive experience for everyone to enjoy learning and networking opportunities to help you in your career and get you closer to the community.
Registration is open!
The registration fee for this year’s event is $100 for individuals and $150 for corporate attendees. Which will cover the two days with more than 8+ hours of content each day. From featured keynote speakers, project roadmap discussions, tutorials, featured community projects, breakout rooms for smaller focused discussions, a virtual job theater, and an official after-party on the last day. By registering for the event, you are also contributing to the open-source community.
Limited opportunity
We are offering $10 registrations for a limited time thanks to the help of our sponsors, a massive discount only for individual and corporate attendees who register before May 24th using the code PX421EB. The early-bird deal is a limited opportunity that won’t be coming back. Make sure to register before the deadline.
Early Bird Discount Code PX421EB
But that’s not all. The surprises don’t end there.
Students and Full-time faculty members with a valid ID can register for FREE thanks to the Students and Academia Scholarship Sponsored by Auterion. We partnered with our Platinum Member to guarantee all students and faculty members will join at no cost. No deadline and no discount code. Just make sure to upload a valid ID. (see the registration page for more details), and don’t forget to thank our Sponsor!
Financial Aid Scholarship
This year we are introducing a Financial Aid Scholarship to support the minorities in our community. It’s vital for the success of our community that everyone who wants to participate feels welcome regardless of gender, gender identity, sexual orientation, dis/ability, race, ethnicity, age, religion, or economic status. We want to remind everyone we are guided by a Code of Conduct that outlines our expectations for all participants and the consequences of unacceptable behavior.
We hope the Financial Aid Scholarship helps community members who might not otherwise be able to attend—applications for the Financial Aid Scholarship close on July 30th (see the event website for more info).
Showing your gratitude and making a statement
For all of the community members who have expressed their wish to donate to the open-source projects directly, we are introducing the PATRON registration fee for $500, with all PATRONS getting special recognition throughout the event and our never-ending gratitude.
All the proceeds from the registrations are going straight to supporting the open-source projects. By registering for the event at any level, you are contributing to the open-source community.
An Improved Online Experience
We wanted to let you know we partnered with the Linux Foundation Events team to offer an overall improved experience to attendees, sponsors, and members. This partnership will allow us to focus on what matters most (you) and leverage the years of experience from the Linux Foundation on developer events.
As a result of the improved program changes and our partnership with the Linux Foundation Events team, and to guarantee we can deliver on our ambitious goals, we are moving away from YouTube to an Events Platform designed for Virtual events.
We are sure this year’s event will allow our community to come together and focus on enjoying content from across the wide range of applications and allow for more opportunities to network. Form connections, increasing the open, collaborative nature of our community.
And if that wasn’t enough, we are also planning to host special keynote speakers introduced in the weeks before the event, who will bring a unique perspective to the event program.
Sponsorship Opportunities
The PX4 Developer Summit wouldn’t be possible without the help of Sponsoring organizations. We offer limited opportunities in the form of sponsorship packages to allow companies to engage with our community in impactful ways. And for the first time, we are also allowing for a few limited experience and promotional marketing sponsorships.
The sponsorship opportunities are not limited to Dronecode Foundation members, but our members enjoy unique benefits. For example, all Silver members enjoy a 25% discount on all the Sponsorship Packages.
You can download the Sponsorship Prospectus document directly from the event website, together with some statistics from last year’s event. Our event is the only drone development event that can guarantee you the exposure your brand needs, and our staff will work with your marketing and product teams to meet your goals.
All of the sponsorships are available in limited quantities, and the unique opportunities are, in some cases, only available for one or two Sponsors. Lastly, we are honoring requests on a first-come-first-served basis. Please reach out to our team directly at [email protected] with any inquiries.
This is just getting started.
We have more coming your way in the coming weeks and months, and as the event gets closer, we expect to have more opportunities for community members to participate.
We are thrilled to finally unveil the master plan and can’t wait for your feedback. Let us know what you think. Feel free to reach out to me directly with any questions or feedback.
For more information on the event and the latest updates, check the event website.
Ramón Roche
Program Manager, The Dronecode Foundation
[email protected]
Launch Sponsors
DIAMOND
PLATINUM

Dronecode Foundation members develop Pixhawk Open Standards to drive interoperability of the drone ecosystem through open-source. The DF facilitates an open process to develop the open standards. The standards enable multiple implementations to be delivered into the market to benefit users and developers by enabling choices in a marketplace.
Payloads are one of the essential components of drone systems. New product development or system integration also demands investing heavy engineering resources due to its diversity and complexity.
Enabling payload interoperability with a unified API
The DS-014 Payload Bus Standard gives design guidance to provide full interoperability between different camera models by defining a standard mechanical interface, the electronics, and MAVLink based camera protocol. The spec was designed with mid-sized payloads like full-frame DSLR cameras, medium-sized LIDAR scanners, or other custom sensors.
Comprehensive Hardware Interface
The electrical design is based on a 40 pin connector that exposes the features you need to develop a multi-payload interface with support for modern sensors
- Ethernet
- USB2.0
- CAN FD
- UART
- TRIG
- CAPTURE
- GNSS_PPS
- VCC_BAT
The specification is specifically designed with gimbals carrying mid-sized payload cameras in mind, with a number of possible configurations, ranging from a modern Ethernet + UART or USB + UART to a classic USB + VBUS + TRIG + CAPTURE, or even a UAVCAN based configuration.
MAVLink Based Software Interface
The Payload bus adheres to the latest MAVLink protocols for Cameras. Gimbals, and Actuators, you can expect out-of-the-box compatibility with any MAVLink compliant autopilot, mission planner app, or MAVSDK based system.
Made possible thanks to the open collaboration of our members
The DS-014 standardization process took over 18 months of development, with contributions and participation from Dronecode Foundation member companies and PX4 contributors. The Workgroup was led by Platinum member Auterion and Silver member Freefly Systems, who also were the top contributors to this standard.
“Auterion firmly believes that an ecosystem of open hardware and software standards increases the efficiency of all involved parties. Standards like the new Pixhawk Payload Bus standard allow every partner in the ecosystem to focus valuable engineering time on their own core product and make the product compatible automatically. We are excited to be adding many PPB compatible payloads to our Skynode powered drones.”
Thomas Gubler, Head of Avionics at Auterion
Integrating new payloads has never been this easy.
Thanks to the DS-014 Payload Bus Standard, the industry now has a recognized, proved, and tested framework for unified payload integration. Adopters can benefit from plug-n-play interoperability and significantly reduce their R&D requirements by using the standard.
The first reference implementation is available in FreeFly Systems Astro, their latest commercial drone platform with RTK, and support for multiple payloads such as Wiris Pro, Sony A7R4, Flir Duo Pro R, and custom payload solutions.
“The DS-014 Payload Bus Standard allows us to offer different payload options to our customers and users. This open standard is a milestone for the whole industry and will save adopters tremendous R&D time on integration.”
Cory Schwarzmiller, Principal Embedded Systems Engineer at Freefly Systems

The standard is now available for everyone to download
Want to participate in the Payload Workgroup?
Have any questions regarding the spec, or want to help us build the next generation of Pixhawk? Join the monthly coordination calls from the Payload workgroup, organized by the Dronecode Foundation.
The best way to contribute to the open efforts hosted under the Dronecode Foundation is to become a member. By becoming a member, organizations can help support open standards and guarantee the continued success of the open-source projects hosted under our umbrella.
]]>
Viewpro joins as a Silver member to collaborate with the community and accelerate the development of Open Standards that enable stable, practical, and highly cost-effective payloads for industrial and commercial applications.
“We would like to share the results and experience we already got in the payload field with the community and reach more progress and success with other members in Dronecode Foundation in the near future.”
by Steven Xue, founder of Viewpro.
Established in 2005, Viewpro is a Hi-tech manufacturer specializing in R&D and manufacturing cutting-edge zoom gimbal cameras for industrial and commercial Unmanned Aerial vehicles (UAV).
With a strong R&D team, Viewpro focuses on research and innovation at image processing, optical zoom algorithm, object tracking, object GPS location resolving, and camera stabilizing solutions based on direct drive brushless motors.
“Viewpro is an industry leader and manufacturer that brings years of experience in the payload sector to our workgroups and special interest groups, and we are thrilled with their support.”
Ramón Roche, Program Manager, Dronecode Foundation
Viewpro has an extensive product range of professional-grade gimbal cameras used daily on Helicopters, Fixed Wings, and Multi-Rotors, through our industry’s many verticals, such as Construction, Defense, Security, Energy, and Infrastructure, to mention a few.
All of the Viewpro gimbal cameras are MAVLink compatible. Their products cover various frequently required functions, including object tracking, EO and IR dual sensors PIP display, laser rangefinder, and IR laser illumination for night vision.
In May 2020, Viewpro launched a new service for its gimbal camera users called Viewlink. With lots of praise from the community. Viewlink is a comprehensive application that supports control via IP/TCP Ethernet and Serial Port. Viewlink helps their customers with firmware upgrades, updating camera settings, and enables remote control of channel settings.
Viewlink wasn’t their only release last year. They also introduced Viewport, a quick setup and release mechanism designed by their R&D team. The light design and convenient operation method made it highly popular among their customers, and its rapidly becoming their defacto standard.
]]>
The HoverGames Challenge 2 “Help Drones, Help Others During Pandemics” has officially ended, and we have the final results. We couldn’t be happier with the level of participation from the wider robotics community.
The challenge consisted of coming up with innovative ways for drones to help people in need, in any way possible, while using the HoverGames Hardware Kit, which consisted of:
- NXP Drone Kit (HGDRONEK66) with the latest PX4 Autopilot pre-installed.
- NavQ Vision System (i.MX 8M Mini)
- MIPI-CSI (Camera) & MIPI-DSI (Display)
- Google Coral camera module
With more than 600 participants and 55 submissions, the HoverGames challenge was a total success.
We want to congratulate all the contestants, in particular, the winners three the contest, all using the latest PX4 Autopilot and MAVSDK releases to achieve their goals:
- Team SCAREcrow’s solution enabling Sentinal Conservation via Aerial Reconnaissance and Escort
- Dobrea Dan Marius’ Drone to Sustain a Quarantine Zone
- Fabian Pichardo’s Drone for Mental Health Rescue
We also want to recognize the tremendous effort by the “Drone Coder” award winner: A Multifunctional Community Helper Drone
We encourage our readers to take a deep dive into the magnificent submissions on the huckster website, we are sure you are going to find more than a few that are more than noteworthy.
]]>
Gumstix joins the Dronecode Foundation as a Silver member to collaborate closely with members on the next generation Pixhawk Open Standards, bringing their years of experience in the Linux space to the Drone Industry.
Gumstix Inc. was founded in 2003 on the belief that market demand for next-generation computing, particularly products that support open-source solutions such as Linux, would drive modular device components requirements.
Today, Gumstix focuses on creating embedded hardware designed for rapid prototyping and deployment. All Gumstix devices are designed in Upverter, an open-source, browser-based design tool. All Upverter reference templates can be quickly copied and customized to users’ specific requirements.
Introducing the latest Pixhawk Standard FMUv6U
Traditionally the Pixhawk project has seen a single major product release with each FMU iteration. Starting this year, we are extending the Pixhawk family with multiple variants, and today Gumstix is officially launching FMUv6U, making it available to all Upverter users.
Gumstix hopes to change the way users prototype and build drones, thanks to the FMUv6U. The addition of the FMUv6U into Upverter gives users the tools to achieve their custom design while adhering to the Pixhawk Standards. We hope this leads to a quantum leap in the number of different drone designs and will ultimately improve the wider community.
“The Dronecode Foundation is thrilled to have Gumstix as a partner, creating new designs based on the Open Standards designed under our workgroups, with collaboration from our members. With the addition of the FMUv6U into Upverter, we hope to streamline the manufacturing process for makers, benefiting the wider Drone industry.”
Ramón Roche, Program Manager, the Dronecode Foundation.
The FMUv6U module is now available in the Upverter module library. Gumstix engineers are very excited to be contributing to the Pixhawk project and the wider Dronecode Foundation community by implementing the FMUv6U standard in Upverter, hoping to facilitate the rapid development of new and innovative PX4 Autopilot based drone designs.
“One of the many privileges of working at Gumstix is seeing the ingenious designs made in Upverter. I’m eager to see how the addition of the FMUv6U into Upverter inspires the next generation of drone systems.”
Andrew C. Smith, Manager, Product Development and Engineering, Smart Manufacturing, Altium.
The Pixhawk FMUv6U is available today.
To showcase the FMUv6U module, Gumstix designed a state-of-the-art FMUv6U-based board that leverages the power of the Raspberry Pi CM4 with Coral Intelligence, the Gumstix Raspberry Pi CM4 + Pixhawk FMUv6U comes with the PX4 Autopilot pre-installed and is available for purchase today.

- Raspberry Pi CM4 connector
- Dual raspberry Pi Camera connectors
- Serial console over USB
- USB Type-C power delivery
- STMicro STM32H753 MCU
- Pixhawk GPS, analog power, RC, and CAN connectors
- 8 PWM outputs
- On-board accelerometer, magnetometer, and gyroscope
- On-board barometer
- Google Edge TPU
About Upverter
Upverter is a browser-based electronics design environment for creating and manufacturing embedded systems and printed circuit boards—all from a single application. Users of all levels can layout PCB designs in minutes, preview 3D designs, and receive real-time validation. Free instant design documentation, on-demand pricing, and software support packages are available for reviewing and sharing. Upverter manufacturing automates the PCB routing, BOM, fabs, and assembly process. All Upverter boards are delivered pretested and fully assembled, reducing engineering costs and design errors. Upverter is an Altium brand. Visit Upverter
]]>
By joining Dronecode Foundation, AmovLab hopes to expand its market to the global developer community and share its experience developing hardware projects and products.
“We want to design more integrated modules with the PX4 Autopilot”.
AmovLab also hopes to participate in the Pixhawk Special Interest Group discussions, establish industry-level open-source flight control standards, increase adoption by evangelizing the open standards, and contribute back to the open-source community.
AmovLab is a company based in Chengdu, China, dedicated to advancing AI education courses and developing R&D equipment. It was established in 2016 and launched its open-source autonomous drone project “Prometheus,” a ROS-based UAV development platform in 2019. The company produced the P-series UAV, specifically designed for scientific research and experimentation. Many well-known universities and research institutes in China adopted the P-series.

AmovLab also operates as an educational training provider that holds various online and offline training courses for robotics developers.
The Amov Community is a rapidly growing and active technology exchange forum in China with more than 30,000 alumni from institutional training and 4,000 registered BBS users.
AmovLab also develops UGVs and USVs based on the PX4 Autopilot and modular components designed for robot development.
The team also develops solutions for drone formation control, autonomous identification, and tracking of drones through their self-designed modems and PTZ cameras.
“AmovLab, since its inception, has been a fierce supporter of open source and has shared technological achievements on various platforms. We hope to make R&D easier for drone and robot developers through our hardware platforms and courses. By collaborating the open source way, researchers benefit from our technology sharing and then contributing their innovations. Our vision is to become an organization that advances AI education and a company that produces high-quality R&D robotic hardware.”
Xiao Qi, Founder of AmovLab.
Resources
- Homepage: https://www.amovlab.com/zh-CN
- Amov Community: https://bbs.amovlab.com/
- Prometheus Project: https://github.com/amov-lab/Prometheus

At the Dronecode Foundation, we are really excited to celebrate another terrific year of contributions to the open-source projects under our umbrella. Last year we received tremendous support from our community, with more than +300 unique contributors submitting more than +7,000 commits upstream. Our great community managed to exceed our expectations in remarkable ways and is keeping the projects on the edge of technology for the coming years.
We put together a report with the Technical Steering Committee and the project maintainers’ help, outlining the top metrics that demonstrate the tremendous pace we are keeping and surpassing year after year.

This report is focused on measuring contributions in commits, the single and most basic unit in version control. We recognize contributions came in many ways last year, such as participation in Standard setting groups, and we will be producing a separate report to celebrate those contributions.

We want to thank the hundreds of developers who helped shape our projects over the last year, particularly the dozens of organizations that poured multiple and vast resources into our community.
The Dronecode Foundation wants to reaffirm its commitment to promoting innovation and driving for more open and accessible technology to support the Drone Industry at large.
This report was made possible thanks to the patronage of our members, who continue to support our mission.
]]>
SAN FRANCISCO, February 3, 2020 – The Dronecode Foundation, the vendor-neutral Foundation for open source drone projects, announced three new directors elected to its Board of Directors. The Board of Directors represents the wider PX4 community. It will guide the Foundation as it executes its mission to enable widespread adoption and accelerate the development of open standards.
Newly appointed directors
Newly elected to serve on the board is Paul Stubbs, who will represent the Gold members. Paul is currently a Director of AI & Innovation Marketing for the Microsoft Business AI team, focusing on autonomous systems, such as vehicles, drones, industrial robotics, and simulators, including working with the Microsoft AirSim team. Paul has been active in the community since Microsoft joined as a Gold member in 2019.
“I am honored to be appointed to the board of the Dronecode Foundation. We are at an exciting inflection point in the history of flight, and the Dronecode Foundation is changing how the world codes, trains, simulates, certifies, and flies both piloted and autonomous drones.”
Paul Stubbs, Director of AI & Innovation Marketing for Microsoft Business AI team.
Chad Sweet and Hyon Lim are the Silver member representatives on the board, bringing their years of experience in the field of robotics to the Board of Directors.
Chad Sweet is the co-founder and CEO of ModalAIⓇ, a Blue UAS Framework manufacturer of American-made, autonomous autopilots for drones and ground robots. Sweet is highly experienced in robotics R&D, and during his 20 years at Qualcomm, led efforts in computer vision and wireless communications with 15 patents granted. He was responsible for groundbreaking projects such as the Snapdragon Flight, which is currently en route to Mars via NASA’s Ingenuity. Sweet is committed to advancing the U.S. drone industry by providing innovators with ModalAI’s open robot and drone perception and communications systems manufactured in the U.S.A.
“Over the past year the drone industry has experienced a productivity transformation and I believe that open-source is the catalyst to further industry growth and integration. I am excited to join the Dronecode Foundation Board of Directors and look forward to working with the Dronecode Foundation team and fellow board members to keep up the momentum and propel the U.S. drone industry forward with open-standards and open-source.”
Chad Sweet, CEO and Co-Founder ModalAI
Hyon Lim is the CEO and co-founder of UVify, a manufacturer of drones for Fortune 500 companies, universities, research labs, and more. Hyon has been an active researcher in autonomous systems and his published computer vision and drone-related papers have been cited more than 1,110 times to date. Hyon also has been active in the community and has contributed to PX4 since 2012, which was around the start of the industry.
“I am pleased with the opportunity to join the Dronecode Foundation’s Board of Directors at such a challenging and exciting time. I am deeply passionate about our industry, and the importance of the role in setting standards in the drone industry. I am excited to work with my fellow board members to further expand the Dronecode Foundation and ensure that we set standards that benefit the Foundation and its members.”
Hyon Lim, CEO and Co-Founder UVify
The 2021 Board of Directors
The Dronecode Foundation board sets the business direction as well as oversees IP management, marketing, and events on behalf of the organization, and is formed by:
- Lorenz Meier, Chairman of the board – Co-founder and CEO, Auterion
- Kevin Sartori, Platinum board member – Co-founder, Auterion
- Paul Stubbs, Gold board member – Director AI Marketing, Autonomous Systems, Microsoft
- Chad Sweet, Silver board member – Co-founder and CEO, ModalAI
- Hyon Lim, Silver board member – Co-founder and CEO, UVify
Senior members of the board of directors welcome the newly appointed directors.
“As the drone industry keeps growing, the collaboration among industry players becomes increasingly important to ensure the development technology that is both safe and scalable.
Kevin Sartori, Co-founder, Auterion
I’m excited to work with the newly appointed board directors on serving the open source community and enabling the industry with open standards for new autopilots, smart batteries, cameras, and integrations of services. In 2021 an open approach beats closed ones.”
Building a healthy ecosystem
Since its inception in 2014, the Dronecode Foundation has been at the forefront of innovation, enabling the collaboration between developers, companies, and supporting organizations.
“The Dronecode Foundation has set with PX4, MAVLink, and Pixhawk the standards over the last decade in the drone industry. As drones find increased adoption in enterprise applications, standards, integrations into industry-leading drones and enterprise software and our permissive open source license are key factors for adoption.”
Lorenz Meier, Chairman of Dronecode, co-founder and CEO of Auterion.
The Dronecode Foundation is thrilled to welcome the newly appointed directors. Their terms are set to begin immediately and run through January 2022. We hope you will join us in welcoming the new directors.
About Dronecode Foundation
The Dronecode Foundation, a Linux Foundation project, promotes innovation through open source and open standards in the drone industry. It fosters collaboration to enable widespread adoption of open source technologies and helps accelerate the development of the PX4 Autopilot and the surrounding open source projects.
www.dronecode.org
Follow Dronecode for further updates.
About Auterion
Auterion provides enterprise and government with an ecosystem of software-defined drones, payloads, and third party applications within a single easy to use platform based on open-source standards. The platform gives operators greater choice, flexibility, and assurance, to improve their drone workflows, from mapping to inspection, cargo, and ISR. With 60+ employees across offices in California, Switzerland, and Germany, Auterion’s global customer base includes GE Aviation, Quantum Systems, Freefly Systems, Avy, and the U.S. Government.
auterion.com
About the Business AI team at Microsoft
The Business AI team at Microsoft is part of the Microsoft Technology & Research division. The team drives research and new product incubations in emerging technologies such as autonomous systems to democratize and empower subject matter experts and Engineers to tackle real-world business challenges with AI.
Learn more about autonomous systems at Microsoft
About ModalAI
ModalAIⓇ helps manufacturers and independent builders get to market quickly and affordably with Blue UAS Framework autopilots for drones and ground robots made in the U.S.A. Based in San Diego, California, ModalAI spun out of Qualcomm® in 2018 and leverages over five years of prior research and development in the drone and robotic markets.
www.modalai.com
About UVify
UVifyⓇ is an American manufacturer of multi-award-winning aerial robot products that deliver peerless experiences by going above and beyond what you think drones can do. UVify drones are category leaders in the entertainment, civil, education, marketing, and research sectors. UVify’s research drones are the most widely used research drones in the world and are the platform of choice of many Fortune 500 companies, university research labs, and more.
www.uvify.com
Contact us for more information.
Ramón Roche, Program Manager
[email protected]
Phone # +1 915 208 4951

Founded in 2018, Timatec is a company consist of IT professionals with Qt technology experts. They have been focusing on developing and distributing software for ground control station and advancing drone utilization in Korea.
“We are developing GCS software in various fields from educational to industrial purpose, and our R&D are projecting on technologies such as topographical analysis based on 3D modeling of images taken with drones.”
Recently, through researching deep learning’s object detection technology with drone operation, Timatec is focusing on developing safer and more autonomous drone operation technology.
By becoming a member of the Dronecode Foundation, they hope to work closely with the open source community of PX4 and QGC, to collaborate on more advanced technologies in the field of GCS and drone utilization pursued by Timetec, and contribute back to the community in a meaningful way.
“Timatec hopes that PX4 and QGC will become more popular in Korea, and we will perform well as a bridge between communities on the way of it.” from Sungho Kang, CEO of Timatec.

We welcome Timatec joining Dronecode Foundation, and looking forward to the collaborations!
]]>The Ainstein’s UAV Standard Radar Altimeter US-D1 is a mmWave Radar sensor that is mostly used for terrain tracking commonly required for precision agriculture. In a recent collaboration with their customer Fairweather IT (aka: FIT) from Montana, Ainstein enhanced FIT’s scientists and engineers’ drone based Water Sampling Platform (WaSP) with their sensor technology.
FIT’s drones are deployed in hazardous or inaccessible surface water bodies for routine sampling and monitoring. For any of their UAV projects that didn’t involve water, lidar worked great as a rangefinder. However, since most of FIT’s critical tasks occurred over bodies of water, lidar was not a usable solution. “Many people use a laser or lidar range finder which works great on land. Once we flew over water though, the numbers went all over the place. We looked at other lidar range finders -potentially using different wavelengths of light. We looked at different powers. We even looked at sonar but unfortunately sonar’s got a very short range.” Ainstein’s radar solution perfectly fitted their needs.

We are excited to share this success case study from our member company where the open drone ecosystem is creating value for the industry. By having interoperability parts like Pixhawk and Ainstein’s Radar Altimeter, enabling “plug-n-play” experiences for developers, allows the service providers to focus on their applications.
See the whole discussion here: https://ainstein.ai/drone-fit/ and the demo video from Ainstein below.

Community and members of the Dronecode Foundation, as the year comes to an end, we are wrapping up our 2020 plan and set up the foundation for next year. Following our bylaws, we are calling for elections of Gold and Silver directors for the 2021 Board of Directors.
We want to start by thanking the current (and parting) Gold and Silver directors who represented their membership tier throughout the year.
- Gold Director: Larry Liu (Yuneec)
- Silver Director: Andreas Lamprecht (AirMap)
- Silver Director: Yan Li (Taisync)
The Dronecode Foundation Board of Directors is our Governing Board and is responsible for the operations, community outreach, and budgetary decisions for the foundation. The directors consist of:
- Community Director
- Representatives from each of the membership tiers (1 x Platinum, 1 x Gold, 2 x Silver)
- Technical Steering Committee(TSC) chair (Voted by open source maintainers)
It’s important to note that the Board of Directors does not make technical decisions for the community, other than working with the TSC to set the overall scope for the foundation.
Please refer to our bylaws for the specifics of how we run elections and the responsibilities of the board of directors.
The 2021 Board of Directors
Gold and Silver members will have the opportunity to represent their tiers during the 2021 year by participating in the board of directors.
The elected directors will need to meet bi-monthly to define and discuss board business to help with the organization’s general strategy lead by the board’s chairman.
There are currently three (3) open seats:
- One (1) representing the Gold member tier
- Two (2) representing the Silver member tier
Nomination and Election Procedures
Elections are crucial for the overall health of our growing community and one of the most significant benefits of members, which directly puts you in the driving seat to help influence the direction of the ecosystem.
Note: Voting is an exclusive benefit of Dronecode Foundation member companies. Please let us know if you are unsure of your current situation.
Nominations
Every Silver or Gold Dronecode member has the opportunity to nominate an employee, done via self-nomination by sending an email to the members-only mailing-list as described below.
- Send an email to the members-only mailing-list ([email protected]) with the following information.
- The subject must follow the pattern “Nomination for Membership Level Director.”
- Example: “Nomination for Gold Level Director”
- Name and Job Title
- Reasons for candidacy (why do you want to nominate)
- Qualifications for the role (have you been involved with the community before?)
- About my sponsors (the member company, list your company membership tier and reasons for candidacy)
- The subject must follow the pattern “Nomination for Membership Level Director.”
- All emails received between November 23rd – December 11th will participate in the voting process.
Note: Dronecode Foundation staff will help guide the nominees best reach the community
Voting
Once the nomination period ends, Dronecode staff will reach out to every active Gold and Silver members with access to a Google Form where you will be able to cast your votes between December 14th – December 18th.
Note: It’s important to note that members will only be allowed to vote within their membership tier. Gold members won’t be able to vote on Silver elections or otherwise.
Results
After the voting timeframe closes, we will be looking at the final results and announcing the results on Monday, December 21st, welcoming the newly elected directors.
Election Timeline
- Nomination November 22nd – December 11th (three weeks)
- Voting December 14th – December 18th (one week)
- Results & Announcement December 21st
Questions
Our team is going to be personally reviewing the process. Please reach out to our staff if you have any questions regarding the election process or your current membership.
Not a member yet?
Join us and start collaborating with the leading companies in the industry, help us drive open-standards and, support the most diverse and inclusive open-source community in the Drone industry.
]]>
DS-015 UAVCAN Drone Standard, which defines the standardized application layer for drones and the suitable physical connectivity layer optimized for unmanned vehicles using UAVCAN v1 networks, is now available on Github in the Dronecode repository.
This is a milestone for the continued collaborative work done by the UAVCAN Drone Special Interest Group(SIG). The SIG is lead by Dronecode Foundation members Auterion, NXP, and Zubax Robotics, with collaboration from other industry partners and open source maintainers.
In the standard doc, you will find the general architecture and recommendations, while the data types and network services definitions can be found in the UAVCAN/public_regulated_data_types repo.

For further information, to join and support the effort of the SIG, please use any of the following methods to get in touch:
– Use the UAVCAN forum category related to the UAVCAN Drone Special Interest Group and open a new discussion topic (recommended)
– Open an issue in the DS-015 UAVCAN Drone Standard repository
– For questions related to the data types or the network services, ideally use the UAVCAN forum, but you can also open an issue in the UAVCAN/public_regulated_data_types repository

Founded in 2009, MMC is a professional drone manufacturer specializing in the industrial-grade UAV systems. MMC is committed to the development of standardized and modular UAV systems and parts. The products and solutions of MMC are widely distributed in the public security, search & rescue, energy inspection and survey & mapping sectors. As a company with abundant manufacturing experience, MMC owns a 30000 sqft facility in Shenzhen, China and manufactures thousands of drones, payloads, ground stations and accessories in house each year.
Other than drone systems, MMC has also developed a series of open-source UAV controllers and ground stations adapted to the PX4 firmware. The newly launched Etlas Mobile 2 ground station is integrated with long-range 2.4GHZ video transmission module and the communication distance can reach up to 20KM. Etlas mobile 2 is also the first QGC based smart controller that supports dual control mode.
Upon joining Dronecode Foundation, MMC will participated in multiple open standard workgroups to further enhance the growth and standardization of the open drone ecosystem. MMC is also willing to share its manufacturing capabilities with the whole communities to develop and build the hardware that meet the DS standards.
“We look forward to enabling the whole drone community with our manufacturing capacity and shorten the process from prototype to production.” – Gary Gu, Vice President of MMC
]]>
Founded on a long list of Department of Defense and NASA sponsored developments, EpiSci is a multidisciplinary innovation company that designs Tactical AI-powered solutions for commercial and defense applications. Through years of high-risk, high-payoff Department of Defense and NASA-sponsored research and development efforts, EpiSci excels at building safe, trustable, modular, and resilient systems for a secure, autonomous future. EpiSci’s innovations include SwarmSense.ai, a platform-agnostic swarm enabling software solution that can be embedded to any PX4 and MAVlink based sUAS platform.
EpiSci joined Dronecode Foundation to collaborate with the community and accelerate the deployment of safe, secure, and modular drone swarms for industrial and commercial applications, they have already established collaboration efforts with other Dronecode Foundation members Yuneec, ModalAI, and Auterion.
“Our strengths lie in designing modular systems for enabling rapid and low-cost multi-platform autonomy for the entire PX4 and MAVLink community. As the need for artificially intelligent drones rises, we would like to share with the community our expertise and also engage in the discussion surrounding open standards and software/hardware interoperability to enable seamless integration for scalable drone swarms. ” – Epiphany Ryu, Director of Operations & Strategy
]]>
The U.S. Department of Defense (DoD) announced $13.4 million in Title III investments as part of the national response to COVID-19, and to support the domestic small unmanned aerial system (sUAS) industrial base. The awards were provided under the Defense Innovation Unit’s (DIU’s) Commercial Solutions Opening.
“The investment will further enhance the U.S. warfighter’s situational awareness, improve human-machine teaming, and provide engineering support for aiding the integration of sUAS capabilities into DoD programs.”
Press Release from U.S. Dept. of Defense
Five (5) U.S.-based companies were awarded, representing a variety in the drone industry: unmanned traffic management (UTM), hardware, software, and sensors, which includes our embers ModalAI, AirMap, and Auterion as a subcontractor.
The grant will help save a total of 14 jobs and create at least 20 new positions in the 5-awarded companies. The D.I.U. expects the funding to support the domestic industrial base’s critical capabilities, which will continue enhancing the U.S. situational awareness.
Dronecode members receive U.S. DOD grants to support the domestic sUAS industrial base.
Silver Member AirMap
“We are proud to partner with organizations across the Department of Defense to rapidly prototype, deliver, and scale advanced commercial solutions,” said Larry Berkin, AirMap’s Executive Vice President of Global Business Development. “These innovations save lives, inspire new operational concepts, increase efficiency, and save taxpayer dollars.”
Larry Berkin, AirMap’s Executive Vice President of Global Business Development.
AirMap will be working with DIU to develop an Intelligence Surveillance and Reconnaissance (ISR) software platform. This technology supports the Army’s Short Range Reconnaissance (SRR) Program and makes it possible for troops to maintain situational awareness, gather critical visual insights remotely without putting military personnel at risk, and conduct safe operations.
AirMap is working with the US Department of Defense’s Defense Innovation Unit, which strengthens national security by accelerating the adoption of leading commercial technology throughout the military, to develop an Intelligence Surveillance and Reconnaissance (ISR) software platform. This technology supports the Army’s Short Range Reconnaissance (SRR) Program and makes it possible for troops to maintain situational awareness, gather critical visual insights remotely without putting military personnel at risk, and conduct safe operations.
AirMap is the leading digital airspace and automation company serving the drone economy. Airspace authorities and enterprises rely on the AirMap platform to safely operate drones in low altitude airspace and deliver critical business insights. AirMap offers best-in-class mission planning, flight and capture, and dataflow automation solutions to enterprises and third-party solution providers, who can connect their applications to AirMap’s open developer platform. AirMap’s UTM and U-space products are deployed in the Czech Republic, Japan, Singapore, Switzerland, the United States, and available in over 30 countries. The company serves a global community of over 300,000 operators and 3,000 registered developers. AirMap is committed to advancing Urban Air Mobility (UAM) through ongoing standards development work, global research initiatives, and industry collaboration. Learn more at www.airmap.com.
Platinum Member Auterion
Platinum Member Auterion Government Solutions (Auterion GS) is under contract to ModalAI to integrate Auterion Enterprise PX4 into the Advanced Compute Flight Controller under the Blue UAS Architecture, for DIU.
We are very pleased to be working with DIU and ModalAi to integrate our latest flight control software and APIs with the latest in Edge computing and AI processing from the Qualcomm Robotics RB5 Platform. We are committed to creating an ecosystem of capabilities and standards that will propel the US drone industry into the next decade of autonomous operations, at scale.
Dave Sharpin, CEO of Auterion GS
Silver Member ModalAI
ModalAI is delighted to be working with DIU to grow its roadmap of US-made autonomous flight controller products. This effort will accelerate the development of SWAP-optimized aerial AI computing platforms and improve PX4 support for Qualcomm® SnapdragonTM processors. Previous products that have come to fruition from the DoD’s support include VOXL Flight and Flight Core, which enable innovators to achieve autonomous drone flight using PX4, ROS, and MAVSDK.
Chad Sweet, CEO and Co-Founder.
ModalAI accelerates autonomy by providing innovators with robot and drone perception and communications systems that are manufactured in the U.S.A. From home and business security to retail and government applications, our highly-integrated AI-powered modules empower a variety of industries to utilize aerial and ground autonomous navigations systems that communicate on 4G and 5G cellular networks. We offer start-to-finish custom design services and plug-and-play computing platforms.
Based in San Diego, California, ModalAI spun out of Qualcomm® in 2018 and leverages more than five years of prior research and development in the drone and robotic markets. ModalAI helps manufacturers and independent builders get to market quickly and affordably. Find out more at www.modalai.com.
DIU, Defense Innovation Unit

The Defense Innovation Unit (DIU) was started in August 2015 to rebuild the department’s relationship with the commercial technology sector. As one of the first “experimental” innovation organizations, DIU connects its DoD partners with leading commercial technology companies. DIU is the only DOD organization focused exclusively on fielding and scaling commercial technology across the U.S. military at commercial speeds. DIU is primarily focused on five technology areas where the commercial sector is operating at the leading edge: AI, autonomy, cyber, human systems, and space. Learn more about portfolios and projects at www.diu.mil.
Source: DOD Announces $84.4 Million in Defense Production Act Title III COVID-19 Actions
** Qualcomm® and SnapdragonTM are registered trademarks of their respective companies.
]]>
We welcome Sojourn as a Silver member to the Dronecode Foundation. Founded by Sven Mesecke and Matt Freie in 2019, Sojourn is a ground-breaking computer vision and supply chain platform technology that provides a new layer within the drone navigation stack to enable precise and persistent delivery pinpoints.
Sojourn’s unique techniques form an end-to-end SaaS platform that aims to bridge the gap between human intent and drone purpose, allowing goods to be delivered via drone or human courier down to the exact location requested by a customer or operator. The solution offers an advanced computer vision stack that processes real-time on device in mobile, wearable and embedded systems with a secure cloud infrastructure accessible by operators via either API or CRM.
Sojourn discovered PX4 as the go-to solution for open source drone autopilots while researching autonomous architecture options last year. After attending PX4 DevSummit Virtual 2020, they decided to join Dronecode Foundation and collaborate with our community.
“We are excited to support the work of Dronecode Foundation and to participate with other companies in the pursuit of open source innovations for the benefit of the autonomous industry,” said Sven Mesecke, CEO of Sojourn. The team hopes to contribute within both hardware and software standards workgroups and to commit previous standards development experience from the IEEE, the ISTA and various other successful industry SIGs.
Sojourn is headquartered in Portland, Oregon. For more information please visit www.sojourn.ai.
]]>
We welcome Airial Robotics as a new silver member.
Airial Robotics develops Gyrotrak technology that combines the advantages of the helicopter and gyrocopter. The team strives to produce high payload allowance, long endurance systems for the commercial UAV market that follows aviation standards. The vehicles are to be deployed in surveillance, mapping, agriculture, cargo applications.
“We believe in open-source, transparency of code base, and documentation. It is essential for certified code and certification process that is required for future BVLOS operations.” – says Jörg Schamuhn, CEO of Airial Robotics.
The company is joining the Dronecode Foundation to collaborate with the PX4 community on standardization efforts for Battery Management System(BMS) , UAVCAN, and BVLOS.
Learn more about Dronecode Foundation membership here.
]]>
Iris Automation Joins the Dronecode Foundation to help push forward regulations and collaborate with the community on new safe drone operations standards.
We are tremendously excited to welcome Iris Automation as a Silver member. Iris Automation is joining the Dronecode Foundation to collaborate with the PX4 community in creating new standards for Beyond Visual Line of Sight (BVLOS) safe drone operations.
BVLOS operation is the first step to full autonomy in airspace and aviation, it is fundamentally required for many applications and industries including search & rescue in remote locations, scalable linear infrastructure inspection, package delivery, land and resource management, and urban air mobility.
Iris Automation currently offers onboard detect-and-avoid systems for BVLOS drone flights and supports some of the best commercially validated UAV platforms, many of which are PX4 based.
James Howard, CTO of Iris Automation, recently joined the PX4 community during the PX4 Developer Summit and talked about what is practical BVLOS today and what’s next from a global perspective on different paths and approaches from regulators.
“The future of BVLOS needs adoption of standards, expansion of permissions, and eventually moving to regulations, industry cooperation to build solutions, and regulatory certification of systems and subsystems. The standardization process will impact drone manufacturers, integrators, and operators, and adopting the standard proactively will help grow and further the industry and build trust with regulators.”
Iris Automation sees PX4 and the open-source community already a global leader within the UAS market and will help make the shift that is needed. As a new member, Iris Automation would like to help advance the development priorities around emerging ASTM standards related to BVLOS, including WK62668 developed within the F38.01 sub-committee and contribute code directly to the PX4, QGroundControl, and MAVLink, and partnering through Dronecode on a potential BVLOS workgroup.
 Watch James Howard’s presentation at the PX4 Developer Summit Virtual 2020
Watch James Howard’s presentation at the PX4 Developer Summit Virtual 2020


The Ultimate guide to the Summit.
The 2020 edition of the PX4 Developer Summit was a huge success, made possible by the amazing community who came together for the two-days of content and interactions.
The Dronecode Foundation is incredibly proud to have had the opportunity to virtually host the event and provide a platform for our global community to learn together.
 Brought to you by Dronecode
Brought to you by Dronecode
The PX4 Developer Summit 2020, was produced by Dronecode, and made possible thanks to the contributions of community volunteers, and the great effort by the Content Committee.

 The Summit in Numbers
The Summit in Numbers
A total of 1,689 community members came together during the Summit to celebrate one more year of PX4. With a massive boost in views, follows, likes, and shares as a result.

 Recordings
Recordings
All of the sessions for both days are now up on the PX4 YouTube channel, all LIVE & PRE-RECORDED presentations are now available.
 Can’t miss Moments
Can’t miss Moments
- Get an overview of the current state of all of our open source projects by Dr. Lorenz Meier on our Day 1 Keynote
- Live MAVSDK demo, live builds, tests, and pull request submissions (live!)
- Pixhawk SIG members share the latest from the Pixhawk Standards, for next-gen FMU, Payload, BMS, and the UAVCAN SIG.
 Top Rated Talks by our Community
Top Rated Talks by our Community
- Keynote: Setting the standards in the drone industry for a decade
- Towards a Lightweight Software Architecture for PX4 Computer Vision
- An In-depth Look at the Multicopter Control System Architecture
- Simulated Workflows using Software-In-The-Loop Simulations
- Embedded machine learning in practice
- The BVLOS future of drone software and industry standardization
What’s your favorite so far? Let us know on social media
Don’t forget to subscribe to the YouTube Channel.
 Community Feedback
Community Feedback
Our awesome community shared some feedback with us through a post-event survey that we launched last week, and we had a total of 116 responses, here’s what some of them had to say.
75% are using PX4 for work
What did you like the most about the event ?
Variety of highly qualified speakers in their specialties and easy access to the event
Community Member, submitted through the post event survey.
There were many speakers with deep knowledge of what they were presenting. I surely learned a lot just watching their presentations. And the list of presentations with automatic adjustment for other timezones in the Sched website was fantastic.
Community Member, submitted through the post event survey.
96% are likely to attend another PX4 event in the future
Where can we improve?
What I would like to see more would be tutorial sessions and workshops.
Community Member, submitted through the post event survey.
KEEP DOING IT ONCE IN 6 MONTHS AND VIRTUALLY FOR THE WHOLE WORLD
Community Member, submitted through the post event survey.
94% would recommend the Summit to a friend or colleague
How can we make this event better? (Recommendations / Suggestions)
More live demos or simulations of current projects
Community Member, submitted through the post event survey.
I’m actually satisfied with this event. One of the most insightful summit i’ve attended. Thank you for organizing this!
Community Member, submitted through the post event survey.
Please keep it online and free as this time
Community Member, submitted through the post event survey.
 Live Chat
Live Chat
The community followed the event through the PX4 slack channel #px4-dev-summit where our awesome team of volunteers ran fun surveys and collected questions some which got answered live on stream.





 News during the summit
News during the summit
Here’s what some of our members had to say during the summit.

 After Party
After Party
The not-so-secret after-party was held as promised, we were joined by more than 20 community members ( and at least four dogs). It was the perfect way to end the Summit, chatting with friends and sharing PX4 stories.
and at least four dogs). It was the perfect way to end the Summit, chatting with friends and sharing PX4 stories.


 See you soon.
See you soon.
We are excited about the PX4 Developer Summit 2021. We are hoping to host the event at ETH Zurich again next year. We will have more news as soon as the global situation calms down, and once travel restrictions have been lifted.
We want to bring you the best of both events and will be looking at more opportunities for the community to get access to the Developer Summit in the future.
 Thank you, Sponsors & Partners
Thank you, Sponsors & Partners
This event was made possible thanks to the enormous support from our Sponsors and Partners.
Platinum Community Champion
Gold Community Champions
Community Supporters

Partners


Announced during the PX4 Developer Summit 2020, Maxwell Innovations joined Dronecode as a Silver member, to help sustain the PX4 open-source ecosystem, and openly collaborate on hardware standards. Community, let’s give Maxwell Innovations a warm welcome.
Maxwell Innovations is an innovative aerospace company founded by Aeronautics, Astronautics, and computer science engineers, with previous experience on several military and civilian UAS systems.
They develop ruggedized UAVs and Payloads, for use in harsh environments, they have been successfully deploying vehicles to Antarctica for scientific explorations for the last three years.
The team at Maxwell innovations is really happy to join Dronecode and to contribute to the PX4 open-source ecosystem. We look forward to all the work coming out of your lab.
]]>
Last year Microsoft joined Dronecode as a Gold Member to collaborate with the PX4 open-source community thanks to their AirSim integration into PX4. Since then, AirSim has passed 10,000 stars on Github, and we are seeing increased developer adoption of the AirSim/PX4 workflow for testing and simulation.
Learn more about our continuous integration effort in Microsoft’s blog »
Catch-up on the #PX4DevSummit
Microsoft was a proud Gold sponsor of the PX4 Developer Summit last-week (July 6 & 7), where we had some key team members from the AirSim team present the latest developments.

- Microsoft AirSim: Applications to Research and Industry
- Ratnesh Madaan, Research Software Development Engineer, Microsoft

- Guada Casuso, Principal Product Manager of Autonomous Systems, Microsoft;
- Paul Stubbs, Director AI Marketing, Microsoft

Two of the leading members of the PX4 open source community announced last week during the PX4 Developer Summit | Virtual 2020, a collaboration to develop integrated hardware and software solutions for the UAV industry.
The addition of industrial and automotive parts from NXP Semiconductors portfolio enhances the security in drones and rovers. This relationship will ensure a bright future for the enterprise adoption of the PX4 Autopilot, where functional safety is paramount.
“This partnership will enable the mobile robotics community with the components meeting quality specifications needed to ensure functional safety and security in drones and rovers based on reliable long-life industrial and automotive parts and reference designs”,
“We have been participating in the open-source PX4 community for several years now and with this close relationship with Auterion, and Auterion Enterprise PX4, we are excited to work together to ensure these vehicles are prepared to meet current and future regulations and standards governing modular safe drone architectures.”
Iain Galloway, Drone Program Lead, Systems Innovation, NXP.
“Safety is the number one priority in commercial drone operations. NXP’s leading position as a semiconductor provider for safety-critical automotive applications is the perfect pairing for Auterion’s enterprise-grade drone software platform”,
“Together, we will be able to provide integrated hardware and software solutions to the drone industry that combine high-performance compute with safety-first engineering.”
Lorenz Meier, co-founder and CEO, Auterion.
Dronecode celebrates the agreement between the two giants and welcomes the effort to bring high reliable hardware and software based on open source to the industry.
]]>
After the great success of the first HoverGames challenge “Fight Fire with Flyers,” the Drone team at NXP set out to inspire developers once again to help others by polishing their development skills, this time by creating new ways to use drones to help healthcare and frontline workers. Hosted by Dronecode partner Hackster.io.
HoverGames Challenge 2: Help Drones Help Others
NXP is inviting drone developers and roboticists to imagine new creative ways to help others during a pandemic. Some examples include disinfecting surfaces, medicine delivery, dispensing hand sanitizer, delivering nasal and throat samples for testing, or even connecting people in isolation.
An open invitation to the PX4 community of developers
Gold member NXP, and Dronecode want to extend an invitation to the PX4 community at large to participate in the challenge, we received tremendous support in the original challenge, and we are excited to announce that Dronecode will be a judge once again.
Contest Judges
- Arm
- Platinum Member, Auterion
- Dronecode
- Emcraft
- Gold Member, NXP
You have to act fast before they are gone.
Similar to the first challenge, you are required to use the HoverGames hardware to compete in the challenge. The HoverGames drone development kit is a modular open development platform that contains everything you need to compete on the challenge, the package includes:
- A Flight Management Unit (RRDRONE-FMUK66) with the latest stable release of PX4 Autopilot pre-installed.
- A sturdy carbon fiber quadcopter frame
- Telemetry radio and remote (RC) control
- New to this challenge, an 8MMNavQ companion computer, using NXP i.MX 8M Mini Vision development board, with a camera module that runs Linux and ROS
- All of this for $300 (a $400 discount!)
Best of all, if you already have a HoverGames kit from the previous challenge, you can upgrade your equipment for $50, and receive an 8MMNavQ companion computer.

Incredible Prizes
- 1st Place – $3,000 Electronic Visa Gift Card
- 2nd Place – $2,000 Electronic Visa Gift Card
- 3rd Place – $1,000 Electronic Visa Gift Card
Bonus Prizes
- 40 winners will receive up to $100 worth of NXP hardware
- 4 winners will receive a $1,000 special price from NXP Partners, rewarding the most innovative idea, best use of PX4, and more!

Qualcomm, a longtime ecosystem partner of PX4, released the Qualcomm Robotics RB5 platform. The first of its kind to bring together 5G and AI to empower developers and manufacturers to create the next generation of high-compute, low-power robotics.
The Qualcomm Robotics RB5 Development Kit utilizes 96Boards Consumer Edition Specification, which helps offer versatility for creating innovative proofs-of-concept and rapid prototyping.
The Dronecode community of members and partners came together to support the Qualcomm Robotics RB5 platform’s announcement:
Platinum Member Auterion
“The new Qualcomm Robotics RB5 platform is a game-changer for drone and autonomous robotics, as its machine learning accelerators will allow adopters to replace manual inputs with AI,”
Dr. Lorenz Meier, chief executive officer, Auterion and Dronecode chairman.
Gold Member 96Boards
“We are very excited to support the Qualcomm Robotics RB5 platform as the latest addition to the 96Boards.AI initiative,” said Dr. Yang Zhang, director, 96Boards. “Qualcomm Robotics RB5 featuring QRB5165 Robotics Processor, is the first 96Boards compliant platform offering 5G, AI, Heterogeneous Computing, Computer Vision Engine, Advanced ISP Multi-Camera Concurrency for a large range of applications. With our partners, we believe this product will revolutionize the robotic and drone market as we know today. We are pleased to see our member Qualcomm Technologies continue to deliver its commitment to the wider developer ecosystem, with a clear path for production.”
Dr. Yang Zhang, director, 96Boards.
Silver Member FLIR
“We believe the Qualcomm Robotics RB5 platform will offer a critical advantage for our next-generation unmanned systems,”
Roger Wells, vice president and general manager, unmanned systems and integrated solutions, FLIR.
Silver Member ModalAI
“The incredible amount of AI processing and 5G capabilities built into the Qualcomm Robotics RB5 platform will enable new autonomous drone experiences, such as navigating quickly through tight spaces while mapping the environment for objects of interest. We look forward to working with Qualcomm Technologies and integrating the Qualcomm Robotics RB5 platform to build off of our existing work with the Defense Innovation Unit to expand the capabilities of our sUAS platforms,”
Chad Sweet, chief executive officer, ModalAI.
Ecosystem Partner Open Robotics
]]>“Open Robotics is the hub of a global community, creating and applying open software and hardware platforms for robotics. In our work we aim to lower the barrier to entry into the field for students, researchers, application developers, and entrepreneurs alike. So I’m excited to see the release of the Qualcomm Robotics RB5 platform, which will help to spur yet more innovation in robotics across a variety of application domains,”
Brian Gerkey, chief executive officer, Open Robotics.

96Boards and Dronecode have come together to collaborate on open drone standards. To further strengthen the relationship between 96Boards and Dronecode, 96Boards is pleased to announce that the company has become a Gold Member of Dronecode, and respectively, Dronecode is proud to announce that it has become a member of 96Boards and will join the steering committee.
96Boards will incorporate different components of the Pixhawk hardware standard in forms of mezzanine products, and new specifications, further enhance the growth and standardization of the open drone ecosystem.
96Boards is well respected within the industry for providing innovative and flexible solutions. It provides a range of hardware specifications created by Linaro to make the latest ARM-based processors available to developers at a reasonable cost. The specifications are open and define a standard board layout for SoC-agnostic (processor independent) development platforms that can be used by software application, hardware device, kernel and other system software developers. Boards produced to the 96Boards specifications are suitable for rapid prototyping, hobbyist projects or incorporation into new systems for a wide range of applications including desktop and laptop computing, the digital home, digital signage, point of sale (POS), high-end audio, robotics and drones, artificial intelligence, virtual reality, IoT and industrial control. Standardized expansion buses for peripheral I/O have led to a wide range of compatible add-on mezzanine boards that will work across a variety of 96Boards products. Users have access to a wide range of boards with different features at various price points. In addition, some SoC vendors have announced long term availability of the SoC to encourage their use in products with long life cycles.
“We are very excited to join Dronecode in helping define the standard for next phase mass adoption of the open source drone technology.” said, Dr. Yang Zhang, Director of 96Boards, “96Boards as the largest cross silicon platform standard organization is uniquely positioned to help Dronecode to achieve such ambition.”
Dr. Yang Zhang, Director of 96Boards
Dronecode is a US-based non-profit, and vendor-neutral foundation for open source drone projects. Dronecode helps nurture the open-source communities, guides project governance, provides infrastructure, and critical services to mass adoption. Some of it’s supported projects include PX4 Autopilot, MAVLink, QGroundControl, and MAVSDK. The PX4 Autopilot is the most widely adopted open-source flight controller. It has a complete ecosystem of components that has been driving industry standards for unmanned vehicles, ranging from protocols for onboard and intra-vehicular communications to UI and SDKs that provides full flight control and mission planning. Pixhawk open standards provide hardware specifications and guidelines for drone systems, such as the most advanced flight controllers in the industry, an ecosystem of payload interfaces, and smart battery management. The Dronecode foundation creates a sustainable collaboration framework for the ecosystems’ advancement and adoption. The entity is funded through yearly memberships by organizations that support open ecosystems and standards. Dronecode is part of the non-profit Linux Foundation.
“The Dronecode Foundation is thrilled to join 96Boards, and collaborate on the development of open hardware standards for the PX4 Autopilot ecosystem, the largest commercially adopted open-source flight stack.” said, Dr. Lorenz Meier, Chairman of Dronecode, “Dronecode with the help of its member organizations, are openly collaborating in the development of the Pixhawk standard, we welcome 96Boards and thank them for their support.”
Dr. Lorenz Meier, Chairman of Dronecode
Join us at the PX4 Developer Summit

96Boards will join Dronecode and the PX4 community at the second edition of the PX4 Developer Summit, streamed LIVE on July 6 & 7. The PX4 Developer Summit is a drone development conference targeted towards professional and aspiring drone developers, roboticists, software engineers, researchers, students, and academia. The event, streamed live for free, is the yearly check-in for the PX4 community at large. Learn more about the PX4 Developer Summit.
]]>
The San Diego based ModalAI spun out of Qualcomm® in 2018 and is leveraging the five years of prior research and development in the drone industry.
The team at ModalAI is putting all that experience to work on VOXL Flight. They developed a plug-and-play open-development platform for GPS-denied autonomous drones and robots, running PX4, capable of autonomous drone navigation.
ModalAI offers a combination of companion computer and flight controller for safe indoor flying. VOXL Flight enables a wide range of applications, from indoor navigation to large scale, 4G-connected BVLOS.
Learn more about VOXL Flight on their Press Release below
VOXL Flight Combines Companion Computer and PX4 Flight Controller on One PCB For Safe Indoor Flying
By Chad Sweet, CEO ModalAI
Imagine the computing power of a Qualcomm Snapdragon SoC and the flexibility and ease-of-use of a dedicated PX4 flight controller on a single PCB. That’s the new VOXL Flight from ModalAI.
VOXL Flight uses Visual Inertial Odometry (VIO) to fly safely indoors. With computer vision stability control, the drone flies more precisely, which makes it easier for the pilot to command. To optimize its VOXL platform for VIO, ModalAI employs camera and IMU frame time synchronization and exposure control algorithms. The 6 degrees of freedom position is computed and then passed directly to PX4 using the voxl-vision-px4 library and MAVLink.
Fundamentally, VIO combines a computer vision camera with measurements from an Inertial Measurement Unit (IMU). The magic is that it computes real-world coordinates in millimeters, from combining 3D features tracked in pixels and acceleration measured in meters/second2. The VIO algorithm publishes a covariance matrix that describes the certainty of its velocity and position estimates.
VOXL Flight also supports Collision Prevention. In this case, depth maps are computed using stereo cameras, an obstacle map is computed, and the mapping data is passed to PX4 using MAVLink. The processing and communication are all done onboard VOXL Flight, and aside from tracking and stereo sensors, no additional hardware is needed.
The VOXL m500 development drone has VIO and Collision Prevention ready to fly and is preconfigured with camera mountings and wiring to mount on a UAV directly. The pre-configuration helps you get your drone in the air quickly with less programming and installation time.
VOXL Flight integrates the following technologies:
- Artificial Intelligence (AI) for movement, such as Simultaneous Localization and Mapping (SLAM), to orient your drone to its ever-changing surroundings and plan mission paths
- GPS Denied Flight capabilities to keep your drones safely in flight and navigating indoors and challenging outdoor environments
- AI perception, using GPU accelerated TensorFlow Lite, facilitates obstacle avoidance with deep learning object recognition and integrated depth sensing
- Support for up to 4 image sensors for simultaneous 4k video capture, streaming and computer vision processing
- 4G cellular or Microhard pDDL command, control and video via a plug-in add-on.
Click here to learn more.
]]>Dronecode Member, Auterion, today announced the release of Skynode, a first-of-its-kind reference design that mixes companion-computer, the latest Pixhawk reference standard FMUv5X, and LTE connectivity. Skynode comes with Auterion Enterprise PX4, and you can take advantage of all the features and multi-payload capabilities out of the box.
“Built on top of open standards like FMUv5x, PX4, and MAVLink, Skynode with Auterion PX4 enables drone manufacturers to rapidly enter new markets by making their products compatible with an ecosystem of payloads, components, services, and workflow integrations that give companies the tools they need to deploy large fleets of drones,“
Lorenz Meier, co-founder of Auterion.
Auterion calls this project a stepping stone, enabling anyone to take advantage of their Enterprise PX4 offering by providing fully integrated hardware and software, providing quality and adding value to their customers.
Skynode will launch in four configurations:
- Skynode Enterprise: designed to integrate drones into enterprise workflows
- Skynode OEM: provides the Enterprise functionality at a convenient form factor for manufacturers.
- Skynode Government: Meeting Government imposed requirements on every component, hardened for robust use-cases.
- Synode RTA by GE Aviation: for operations that require higher safety standards and certification by regulators, designed by GE Aviation.
Be sure to also check out their recently revamped website, with tons of information regarding Skynode, Enterprise PX4, and the open-standards they support.
About Auterion
Auterion is the leading software platform that powers drones for enterprises and government. Based on open-source software, Auterion drives standardization efforts in the PX4 ecosystem. With offices in California and Switzerland, Auterion has raised $25M in venture-backed funding from investors such as Lakestar, Mosaic Ventures, Costanoa Ventures, and Tectonic Ventures. The company’s global customer base includes GE Aviation, Quantum Systems, Impossible Aerospace, and the U.S. Department of Defense. Learn more at www.auterion.com.
Resources
- Twitter: @auterion
- LinkedIn: https://www.linkedin.com/company/auterion/
- YouTube Launch Video: https://youtu.be/Xzh4txK0LRg
- Skynode announcement “Bringing a Pilotless Future and Autonomous Delivery One Step Closer to Reality.“
- List of Open-Standards Auterion supports “How we drive forward international UAV standards.”
- Press Release “Auterion Launches Skynode to Accelerate the Development of Enterprise-Ready Products for Drone Manufacturers“
Modern industrial drones have advanced far beyond the popular DIY hobbyist and consumer camera drones. These new era industrial-grade autonomous systems are now used to provide safety-critical tasks, from search and rescue to medical transportation and delivery. We see that systems like these begin to require many additional sensors connected by a highly robust and functionally safe CAN bus network.
UAVCAN 1.0 addresses the challenge of deterministic on-board data exchange between systems and components of next-generation intelligent vehicles: manned and unmanned aircraft, spacecraft, robots, and cars. In addition to its use in drones other small robotic systems, it can be used in industrial applications and control systems. The updated UAVCAN V1.0, which builds upon lessons from the V0 specification, is also intended to be taken through a formal standardization process.
As the largest global semiconductor supplier to the automotive industry, NXP has modernized the vehicle network with CAN and CAN-FD silicon. UAVCAN is similarly poised to transform the networks of modern software-defined small robotic vehicles. Networks for industrial-grade drones are becoming more complex as the number of sensors and distance between sensors and fight controllers increases. Furthermore, low-latency deterministic networks are key to safety-critical systems. However, commonly used short-range buses such as I2C and SPI interfaces are not as robust and cannot handle the distance and the growing complexity of the network. In comparison, CAN-FD offers data rates from 2 to 5 MbpsBPS, and their robustness has been well proven in Automotive applications. Because of the priority-based bus architecture, it means many devices can be connected while managing real-time peripherals such as motor controls. Multiple busses or transports can be connected to enable redundancy.
In the new V1.0 specification, provisions are made to allow for abstraction of the lower layer protocols from the actual functional use. This makes it easily adapted to different use cases or for other functional domains. By changing the datatype-name definitions, the UAVCAN V1.0 protocol works equally well for a PX4 Drone or a completely custom device such as a micro-spacecraft. A major update in V1.0 is not only the support for modern higher speed CAN-FD hardware interfaces but also the ability to use it over other types of physical layer protocols.
UAVCAN V1 is in development now, and NXP is pleased to support its development by working with the community and providing engineering resources to enabled this improved standard. This is a standard open to everyone. No licensing or approval of any kind is necessary for its implementation, distribution, or use.
In order to better reflect the applicability of the standard not just to drones, but now to many different networks and vehicle types, the name UAVCAN can be interpreted as Uncomplicated Application-level Vehicular Communication And Networking.
For additional reading, a high-level overview of the protocol is provided in the article “UAVCAN: a highly dependable publish-subscribe protocol for real-time intravehicular networking”.
]]>
Moscow based Copter Express today joins Dronecode to collaborate with the open-source community. The company behind the Clover Drone Kit joins as a Silver member. By becoming a member of the Dronecode community, they hope to help create a top of the line software stack.
“Doing aerial robotics education for five years, we are focusing on creating an international environment for the growth of young talents. I think the Dronecode community is the best place for young enthusiasts to find like-minded partners to create the future of drones”
– Oleg Ponfilenok, CEO at COEX.
COEX is currently selling its educational platform through Indiegogo. Clover is a programmable educational quadcopter kit that consists of accessible open source components, and the necessary documentation and libraries for controlling it.
The kit includes a Pixracer flight controller with the PX4 flight stack, a Raspberry Pi 4 as a controlling onboard computer, and a camera module for performing flights with the use of computer vision, as well as a set of various sensors and other peripherals.
COEX is no stranger to the community, just this past June, their leadership team gave a great talk on the PX4 Developer Summit titled “PX4 in STEM education: How e taught a thousand students how to program drones”. One of the best-received presentations of the show.
They have also just hosted the biggest PX4 hackathon of the year “COPTERHACK’19” on October 11-13, they were able to bring together more 480 participants from 51 teams.
We thank Copter Express for their trust, and support of open-source technologies.
]]>
The US-based company brings the open-source community years of experience integrating thermal imaging sensors and other sensing solutions that expand situational awareness in a variety of form-factors. These include everything from cars to mobile phones and drones.
Dronecode, home to the PX4 Stack, is thrilled to announce that leading thermal imaging and sensing technology producer, FLIR Systems Inc., is joining Dronecode as a Silver member. As part of the membership, FLIR will join the newly created “Payload” working-group.
Payload working-group
FLIR Systems is the payload working group’s newest member, which focuses on cross-vendor payload integrations by developing standard interfaces for MAVLink-ready devices and systems.
“FLIR is thrilled to join the Dronecode Payload Working Group, and we look forward to supporting its efforts to develop standard, open-source interfaces for thermal camera payloads,”
Bob Proebstel, Senior Systems Engineer, FLIR Systems.
“Collaborating in the creation and maintenance of open standards and open software is at the heart of the Dronecode community, so we are thrilled to have FLIR bring its years of experience within the drone industry into the payload working group,”
Dr. Lorenz Meier, Auterion Co-Founder, PX4 Creator, and Working Group lead.
Join the working-group and start collaborating on standard payload interfaces
Dronecode is inviting the community to join the conversation. The payload working group will be starting meetings soon and is actively looking for companies who would like to collaborate in the creation of a standard payload interface.
Join the workgroup
- Read past workgroup meeting minutes (meeting archive)
- Click here to join the working group

Dronecode is excited to announce that Silver Member Ainstein AI is launching the new generation of their object detection radar with an exclusive promotion to the community.
Ainstein is excited to launch its second-generation sensor in the μSharp Patch product line, the SRD-D1. This low cost and lightweight object detection radar allow drones to understand their surroundings in all weather conditions better. Radar sensing is expected to be a requirement for BVLOS and Drone Delivery systems.
Ainstien is also driving the development of radar-based compact, robust, and highly accurate altitude sensors. Their US-D1 radar altimeter enables the autonomous operation and highly accurate altitude control in conditions where laser sensors fail, such as during crop spraying, in fog, or over water. US-D1 is also easy to integrate with a Pixhawk, and the PX4 flight stack.
Bringing it all together is Ainstein’s flagship product, the OcPoC Zynq Mini Flight Controller, the world’s original FPGA based flight controller. The OcPoC Zynq comes loaded with embedded Linux, PX4, and an abundance of I/O.

Ainstein is proud to offer these three products on their virtual storefront ‘sensing.ai.’ They offer all of our products individually and in bundles. Ainstein also provides integration/consulting support packages.
They are offering special pricing to members of the Dronecode community until the end of November. Just use the discount code ‘DRONECODE’ at checkout for 10% off of your entire purchase.
Ainstein has been developing radar sensors for drone applications for over 5 years. They are highly involved with the FAA and the development of drone regulations. They actively support testing sites across the country. Ainstein’s CEO, Dr. Zongbo Wang, is highly committed to the drone industry and is confident in its continued growth. In 2018 Dr. Wang was a participating member on the Dronecode Board of Directors.
This blog post features products from a Dronecode member and community supporter.
Dronecode opens the doors to any member with something valuable to share with the community. The Dronecode blog is a direct channel into the community.
To read more about Dronecode and how to support the open-source community, please visit our membership page. Becoming a member is the most effective way to fund community collaboration.

On July 16, 17, the NuttX community met in the Netherlands for two days of NuttX sessions and workshops by top contributors to the project. Dronecode celebrates the gathering and supports the future of the project. The event was attended by PX4 community members who share the love for NuttX, and organizations who support open-source such as Auterion, and NXP.
We look forward to deeper collaboration with the NuttX community in the future.
NuttX author and lead maintainer Gregg Nutt shared his personal insights from the event.
“The event was a success, presentations were exciting and top-notch, the hospitality of the host Technolution, B.V. was flawless. The experience of finally meeting people with whom you have worked together for a decade or more was profoundly moving. Even better, spending an evening together drinking those great Dutch beers.
For me, personally, it was the culmination of a very long journey from the earliest days in the mid-1990s when the OS was just a thought experiment starting with a handful of files. There were a few initial OS-related Open Source projects and continued low-pace development through the early 2000s until the initial release of the first, complete NuttX-1.0 RTOS on February 7, 2007. In those early days, people scoffed at yet-another-open-source-rtos. But I persisted because my primary interest has always been in producing the “perfect” RTOS, at least the RTOS that I always wanted to use.
This has been an effort of love. There has never been a corporate sponsor. The project was never motivated by any commercial interest. I have never made money from the RTOS (other than through related contracted). Nor have I ever been in any competition with other open-source RTOS. I make an effort to always speak positively of all other open-source RTOS projects. People and corporations that provide open-source software to the community are all deserving of respect. Take the money out of the equation, and there is no reason to feel competitive.
So from those humble beginnings as an under-appreciated, personal project to its broad acceptance as demonstrated at NuttX2019, it’s been a long evolution. At this point, it is clear that it is no longer my personal project, but, instead, belongs to the world. My gratification and thankfulness to all those who have supported the RTOS are boundless.”
Gregory Nutt, NuttX Author


Resources

Dronecode is bringing the PX4 ecosystem to InterDrone September 3-6. For the third year in a row, Dronecode will be participating at InterDrone, one of the largest annual commercial drone events in North America. With more than 120 sessions, panels and keynotes, 135+ commercial vendors over the course of three action-packed days at the Rio All-Suite Hotel and Casino in Las Vegas, we have a full enterprise track dedicated to PX4 this year.
Dronecode is bringing together key members of the PX4 community to discuss the benefits of adopting an open-source flight stack. Join PX4 developers who will share their first-hand experience with the project, and learn from adopters how to use the different parts of the stack in your own projects.
PX4 Track: Conference Sessions
Thursday, September 5th. attendees will get a 360 view of the community, best practices on adopting the state-of-art tech stack, and tips and guidance on how to leverage the power of the open-source community.
- Panel: Building market-ready solutions, with the PX4 open source community
- Talk: How to use MAVSDK to control MAVLink based drones
- Talk: QGC the easy to use Open Source ground control station for the PX4 Flight Stack
- Talk: Developing quality solutions on top of the PX4 open-source flight stack
Note: Dronecode is looking for adopting organizations of any of the open-source projects we are discussing during the PX4 Track: PX4, QGC, and MAVSDK. Reach out to us if you are interested in sharing your experience working with the open-source projects and their community, your organization will be featured in the PX4 Track event website.
PX4 Track: Join us on the show floor
Join us on booth 418, we will have the latest PX4 supported hardware, and you will be able to meet PX4 developers, and fellow open source community members.
PX4 Track: Community Appreciation Night
On the night of Thursday, September 5th, we will be hosting our signature Community Appreciation Night, celebrate with the community the recent achievements and network in a relaxed environment with industry leaders. (See our 2018 Community Appreciation Party at InterDrone).
Note: This event is invite-only, pay attention to the official community channels for the opportunity to RSVP.

MAVSDK is the new name for the Dronecode SDK (formerly “DroneCore”), the project is now under the MAVLink project umbrella.
The MAVSDK project is a standards-compliant MAVLink Library with APIs for commonly used programming languages like C++, Swift, and Python. It’s the easiest way to integrate with drones over MAVLink, trusted by leading organizations in the industry.
MAVSDK consolidates the project identity
The project has seen tremendous growth since inception and has now reached the point where it needs its own identity, separate from Dronecode. The maintainer team and the PX4 community stands behind the move and will continue supporting the project. The rename and new home are meant to bring MAVLink adopting communities closer.
Community Backed
The project is made possible thanks to adopting organizations who trust it to deploy products/services and contribute to the codebase.

Learn how you can contribute
While the project is ready to be used in production today, the maintainer team has a vision for the project and its sustainable growth. MAVSDK is actively being used to develop drone solutions by organizations like yours. Learn how you can engage with the maintainer team and get started with MAVSDK below:
- Download the latest release.
- Get the source from GitHub.
- Post questions on the official MAVSDK Forum.
- Reach out to the dev team on the PX4 Slack #mavsdk channel.
- Learn how to use it and check out the possibilities on the developer guide.
- Watch Jonas Vautherin discuss the roadmap during the 2019 PX4 Developer Summit in Zürich.
- Read more on the RFC process behind the rename/transfer.
Gold Members, Representative
- Glen Stark, Yuneec
Silver Members, Representatives
Thanks to our awesome member community for their continuous support.
The 2019 board of directors
- Chris Anderson (3DR) — Chairman
- Lorenz Meier (Community Director, PX4 Autopilot)
- Glen Stark (Yuneec, Gold members representative)
- Andreas Lamprecht (AirMap, Silver members representative)
- Yan Li (Taisync, Silver members representative)
- Kevin Sartori (Auterion, Silver members representative)
As always Dronecode adheres to its bylaws and guarantees the transparency of the elections, read the bylaws on our website.
]]>
The PX4 Developer Summit announced on May 21st, in only four-weeks gathered 198 community members for two-days on the lecture halls of historic ETH Zürich. The format of the event was single-track, with nineteen sessions by twenty-two speakers who gave a quick history of the projects, a run down through the current features and discussed future work (Roadmap), inviting attendees to contribute, each session made interactive by a very participate audience.
After the Summit, Dronecode sent a survey, with 19% of attendees responding, here’s what they have to say:
“I have attended a number of developer conferences before and this event was really head and shoulders above them. Main reason is that it really made you feel part of the community”
Community Member, Overall Rating 5 out of 5.
Crucial statistics behind the event
- 79 Participating companies and Education Institutions
- 193 Attendees
- 18 Countries
- 19 Sessions
- 22 Speakers
19.8% of Attendees responded
- 4.7 Overall event satisfaction (1-5 scale)
- 4.9 Staff
- 4.6 Demos
- 4.5 Networking
- 4.5 Venue
- 4.4 Speakers
- 3.8 Refreshments
- Extremely likely to recommend the event to a friend or colleague.
- 85% audience between 25-49
More than half want to repeat the event in Zürich
Probably not a surprise, but attendees loved visiting Switzerland, and would like to repeat the location for the next Summit, while 29% would like to have an event in the USA, and 13% in Asia.
- 52% would like to repeat in Zürich.
- 16% in the Bay Area, California
- 13% in the USA (Combined results, San Diego, Las Vegas, Seattle)
- 13% in Asia (Beijing, Hong Kong, Tokyo)
Good news is we are planning events close to most of the locations above, stay tuned for more news from Dronecode.
You can also experience the Summit
If you attended and want to relive the experience, or if you missed it and want to experience it for yourself, Dronecode made the recordings from the sessions available on the PX4 Autopilot YouTube channel, make sure to subscribe, like the videos, and leave your comments.

We thank the community for participating in the survey and joining us in Zürich.
]]>
The first-ever developer summit was a success, with 200 community members attending the event from 18 different countries, the lecture room was full with energy and hunger for knowledge, Dronecode was honored to host the event and provide the space for the community to gather.
As mentioned before all sessions during the summit are recorded, you can now see them live on the official PX4 Autopilot YouTube channel .

Our media partner InterDrone interviewed community members during the Summit and recently published their newest podcast episode titled:
A 360° View of the Open Source Drone Developer Community
In this emotionally charged episode, we try to give a clear picture of the community, and what drives developers and their projects. We hope you enjoy it.
Microsoft Joins as a Gold member
![]() Microsoft, a Platinum Linux Foundation member and a strong supporter of open source, joins Dronecode to help advance the open source drone ecosystem, bringing AirSim their advanced simulator to the ecosystem, marking a significant milestone in drone development, unlocking the future of vision-enabled autonomous vehicles.
Microsoft, a Platinum Linux Foundation member and a strong supporter of open source, joins Dronecode to help advance the open source drone ecosystem, bringing AirSim their advanced simulator to the ecosystem, marking a significant milestone in drone development, unlocking the future of vision-enabled autonomous vehicles.
“The PX4 Autopilot has the largest ecosystem in drone development, with a growing number of commercial adopters, and extensive use in research. Microsoft is thrilled to join the PX4 family and to support PX4 through Dronecode.” Said Guada Casuso, Principal Program Manager.
ModalAI Joins as a Silver member
![]()
The San Diego based ModalAI team believes the open source PX4 Autopilot is the path to success in the enterprise drone ecosystem. VOXL, the companion computer, and autopilot platforms ModalAI is developing will be fully integrated into PX4 software stack. These platforms will enable machine vision-based and cellular-connected navigation for state-of-the-art autonomous operation beyond visual line of sight.
“PX4 is the de facto standard for drones. ModalAI looks forward to contributing hardware and software development to advance the growing, open-source PX4 ecosystem.”, said Chad Sweet, CEO of ModalAI.
Teal Joins as a Silver member.
![]()
Teal is an original design manufacturer of hardware and software drone platforms based in the US. Having launched products in the consumer market with the Teal Sport and the Teal One, the company has now expanded its reach into enterprise and defense, leveraging the Teal platform. Teal is a venture-backed company with its entire team based in Salt Lake City, Utah, and is proud to be manufacturing in the US.
“Teal is excited to be supporting the PX4 community and helping to build a strong ecosystem around open source. Teal believes in a future where drones are ubiquitous and positive things in our lives. The work being done in open source and PX4 will be an enabling factor of this future.”, said George Matus, CEO of Teal.
About Dronecode
Dronecode is home to the PX4 autopilot, the MAVLink protocol, QGroundControl, and MAVSDK. Dronecode is a US-based non-profit hosted by The Linux Foundation and is community funded through yearly memberships by companies who support open source.
The organization provides neutral and transparent governance to open source projects and their adjacent communities, offers a framework for inclusive collaboration on open standards, funds services used to develop and distribute releases, and evangelizes to increase adoption and contributors to open source.
]]>Board of Director elections
**UPDATE** March 25th, 2019
Ramón Roche, Program Manager: Dear members and interested parties, in order to ensure the best possible outcome of this election period we are extending the nomination period by one week, voting will continue with the same 3-week period and results will be published shortly afterward as soon as results are clear.
Updated Timeline
- Nomination (with an extended week), March 4th / March 29th
- Voting, April 1st / April 19th
- Results, April 22nd
Silver Member Representative
A total of 3 representatives shall be elected by the Silver members to represent the Silver members on the board of directors, each member can nominate any employee and can vote once to elect 3 candidates.
Election Process / Timeline
Nomination Period
To be held between March 4th and March 22th (3 weeks), in this period Silver members who might wish to represent the Silver members on the board of directors shall present their nominations, the nomination requirements are as follows:
Requirements for nominees
Each nominee must provide the following requirements to be considered for election.
- Reasons for the candidacy
- Qualifications for the position
- Proof of qualifications
- Must be an employee of a Silver Member in good standing by the time elections are held.
How to nominate an employee
In the name of transparency and to make this process frictionless, we will request nominations to be submitted on our forums, while the nomination period is open, create a new post on the newly created Silver Members sub-category on our forums.
Template
Subject: COMPANY NAME, EMPLOYEE NAME, application for 2019 Silver member elections Body: Reasons for candidacy: My reasons for my candidacy are the following… Qualifications The following is a list of my recent accomplishments in the industry, a link to my LinkedIn (or online resume) and proof of my previous involvement in the Dronecode community. Examples of proof of involvement, links, photos, contributions etc.. About my sponsor COMPANY NAME My employer COMPANY NAME is involved in the community in the following way and has agreed to sponsor my nomination.
NOTE: Only applications meeting the requirements listed above will be considered for election.
Voting Period
At the end of the nomination period, all the nominees that met the eligibility requirements will be able to participate in the election. All silver members will have the opportunity to cast a vote, voting will commence on March 25th and will end on April 12th (3 weeks).
Voting
Every active silver member has a right to cast a vote; we will create a new post on our forums with a mechanism to register votes, via google form or otherwise.
Results
After the voting period ends, we will post the results in a new post, welcoming the new silver member representatives on our forums.
Newly elected representatives
The first order of business for the newly elected representatives will be to participate in the next board meeting scheduled for April 16th.
Important Resources
- Dronecode Bylaws
- Forum Group
- Slack Channel
- Dronecode email list (members only)
- 2018 Community Report
Have questions? Contact Us

This is the first yearly report by the Dronecode community, I’m Ramón Roche Dronecode Program Manager, and I recorded the progress from the community this year with the hopes of measuring progress and build a baseline for years to come.
Comments and/or feedback on the content and style of this post would be greatly appreciated at [email protected].
Note: This report will cover the period from January 1, 2018, to December 11, 2018, unless otherwise stated.
Who We Are
The Dronecode Project hosted under the Linux Foundation serves as the vendor-neutral home for PX4 and it’s surrounding ecosystem of projects such as MAVLink, QGroundControl, and the Dronecode SDK.
Who is contributing?
Let’s look at distribution per GitHub Project
MAVLink
7 Repositories
3,158 Commits
92 Contributors
Top 10 Authors in MAVLink Github Org.

Dronecode
8 Repositories
1,923 Commits
30 Contributors
Top 10 Authors in Dronecode Github Org.

PX4
26 Repositories
8,638 Commits
271 Contributors
2,177 Pull Requests
Top 10 Authors in PX4 Github Org.

Combined Project Data
41 Repositories
13,719 Commits
393 Contributors
Top 10 Authors combined PX4, Dronecode, MAVLink Github Orgs.

Flight Test Team
Team of 5
10,523 Flights
20+ Vehicle configurations

What did we accomplish?
Let’s look at releases per project
PX4
~6 Month Release Schedule
QGroundControl
~6 Month Release Schedule
DroneodeSDK
Project still in Beta, no release cadence defined yet.
MAVLink
v2 is still latest, v1 is still in use, Dev Team works through RFCs
QGC Releases in 2018
QGC v3.3.0 February, v3.3.2 released in April
- Video recording save settings
- Parameter editor
- Joystick support for Android
- Structure Scan pattern
- Fixed Wing landing pattern
- Start/Stop video
- Multi-vehicle view support
- ADS-B vehicle support
- MAVLink console
- Log Download
QGC v3.4.0 August, the current stable version is v3.4.4 September
- Offline map increased support
- Flash autopilot firmware either PX4 or APM
- KML support
- Improved polygon support in Survey
- Corridor Scan
- Improved Fixed Wing landing pattern
- Terrain improvements
- Pre-Flight checklist
- Improved Instrument Panel
- ArduPlane support for guided commands
- High Latency Link support
- QGC, 100% translated to Chinese & Turkish
- 48% German
- 36% French
- 39% Korean
MAVLink RFCs in 2018
SDK Releases in 2018
SDK v0.4.0 April
- Serial connection support macOS
- gRPC backend (enables cross-platform builds)
- Camera action support
- Gimbal ROI support
- QGC mission import
- Follow-me improvements
SDK v0.5.0 June
- Serial connection support Windows
- gRPC backend hardening
- Improvements to build system
SDK Swift v0.2.0 November
SDK Python Unreleased*
PX4 Releases in 2018
PX4 v1.8.0 July, current stable version is v1.8.2
- VIO fusion in EKF2
- Obstacle avoidance Interface
- Improved performance for racing drones
- VTOL performance improvements
- EKF2 hardening with limited GPS accuracy
- EKF2 tuning for high magnetic interference
- Wind Estimator
- Structure Scanning
- High Latency Telemetry support
- Precision landing framework
v1.9.0
Coming in:
January 2019
How did this work happen?
Distributed teams across regions and organizations
- Need community collaboration
- Need coordination
- Need official coordination channels
Discussion, Coordination, and Reporting

Coordination meetings (Using Zoom.us)
- 2,152 Participants
- 1.2k Hours in meetings
- 5 Recurring meetings
- PX4 Dev Call Weekly
- Dronecode Weekly
- MAVLink Bi-Weekly
- Avoidance Weekly
- Dronecode Board Bi-Monthly
- UAVCAN Weekly*
PX4 Recording (Started in October)
- 10 Recordings uploaded
- 274 Total Plays
- 20 Play average per episode
- 69 Most plays in a single episode



Dronecode Recording (Started in October)
- 7 Recordings uploaded
- 66 Total Plays
- 8 Play average per episode
- 19 Most plays in a single episode


- 340 Topics (2018)
- 4,200 Topics (All-Time)
- 351 Posts (2018)
- 16,500 Posts (All-Time)
- 243 Likes (2018)
- 1,500 Likes (All-Time)
- 1,7M Pageviews (2018)
- 3.5M Pageviews (All-Time)





Open Sign-up
- 2,133 Users
- 53 Public channels
- Significantly increased activity
- 405,102 Total messages (out of 10k msg on free plan)
- 11% Sent in public channels
- 4% Sent in private channels
- 85% Sent in DMs
33.7 gb (out of 5.00gb on free plan)



Documentation
- The community actively contributes documentation
- PX4 Dev Guide
- PX4 User Guide
- QGC Dev Guide
- QGC User Guide
- MAVLink Guide
- SDK Guide (Core C++)
- Everything ends up on our docs eventually.
- We can be faster!
Translation teams
- PX4 User Guide
- 10% Chinese
- 15% Korean
- PX4 Dev Guide
- 11% Chinese
- QGC Dev Guide
- 99% Chinese
Community Appreciation Night 2018
- InterDrone @ Las Vegas
- 96 attendees


SDK Meetup @ Berkeley
- 3DR @ Berkeley
- 62 attendees


Community is everyone
- Lots of incoming requests
- Early response and engagement is key
- Most contributions are a result of early collaboration


- CI uploads logs here
- Flight Team uploads logs here
- Anyone can upload logs both publicly or privately (not indexable)
- An invaluable tool for support, it’s now policy to ask for a link to your logs!
- Usage guide is available on the PX4 user guide.
- Open Source

Top blockers / Issues in 2018
- No clear Dronecode definition, what is it?
- No clarity on branding (where does PX4 end & DC begin?)
- Individuals & Organizations don’t know how to collaborate
- China strategy still nascent
- Still need to put more work into architecture (SDK, API, etc) vs features, to encourage expansion
- Per project governance issues
- Projects are getting hard to maintain (firehose of information)
- Full-time team of 1
What worked well in 2018
- Face to face meetings are a great way to reduce communication barriers
- Work hand in hand with organizations
- Weekly coordination calls help us keep track of progress
- Auterion’s success heavily influenced developer and membership acquisition
- Software Architecture work pays off
- Low but organized activity is better than high unorganized activity
- Documentation as a source of truth
Who funded Dronecode in 2018?
Silver

Gold
We need your help in 2019
Contributions are always welcomed, from Issue triaging, Forum hunting, Slack lurking or fixing typos in our docs, we need your help next year to reach our goals:
- Maintain the size of our core developer base
- Grow our collaborator base
Thank you for being part of this awesome community!
We joined the Drone industry at InterDrone 2018 (Las Vegas, Sept 5-7), we prepared a week of announcements, demos, panels, classes, and keynotes, here’s a wrap-up of everything we announced at InterDrone 2018.
On the show floor - demos!
On the first day of the show NXP was announced as our latest Gold member, NXP joined members Airlango, Auterion, AirMap, and UVify at our booth, where we showcased the Dronecode stack powering their latest products and services.

Silver member UVify sponsored the Dronecode passport, a program designed to showcase the diversity of our ecosystem. Show attendees had the opportunity to learn more about all Dronecode members exhibiting at InterDrone (Airlango, Auterion, AirMap, NXP, Wingtra, Yuneec, 3DR, Sentera, Optelos) and enter a daily draw for a chance to win a UVIfy prize!


At the conference - Dronecode track
Panel: Leader of open innovation in drone technologies
We were joined on stage by Dronecode members, Airlango, NXP, AirMap, and Auterion (in order from left to right) for an open discussion on how collaboration works in Dronecode. Our members shared insights into why they choose open source and how it enables their businesses. The audience was very energetic and had lots of questions for the panelists, and we wish we could have time to talk to everyone.

Keynote: Lorenz Meier founder of PX4, and co-founder of Auterion
Lorenz Meier, gave a keynote on the transformation of the industry and provided an outlook for next wave in the drone industry, Lorenz highlighted the need for the drone industry to collaborate on open standards.
Dronecode platform track keynote by @Auterion @PX4autopilot founder Lorenz Meier https://t.co/qe88Vk1tgl
— Dronecode Project (@Dronecode) September 6, 2018

Class: “Develop with Dronecode platform”
Presented by co-maintainers Julian Oes (Yuneec Research), and Jonas Vautherin (Auterion) with Brandon Brown (AirMap), they showcased the latest iOS (Swift) Dronecode SDK, Python SDK, and the newly added QGC-AirMap integration powered by the AirMap SDK.

Class: “Make open source work for the enterprise”
Targeted at product and business managers, presented by Kevin Sartori (Auterion) and Jonathan Claman (Auterion) provided a comprehensive introduction to how to build a state-of-art commercial drone in 2018/2019, by leveraging open source technologies and collaborating on open standards solutions.

Community Appreciation Night
We couldn’t have had a better close to the day, thanks to more than 100 community members who joined us on Thursday night. It’s always a good idea to get some face-time, especially when more than 25 companies get together in a fun and vibrant environment over flavorful Mexican dishes. Lastly, you might want to jump over our Facebook page for the all the fantastic photos, and yes, there was a photo booth! Check out the full album here.



In the Media - Announcements!
Many exciting announcements happened during the week, here’s a rundown of all the exciting news from our member companies:
- 3DR and Yuneec announce a joint venture
- Read it on the 3DR blog
- Read it on the Yuneec newsroom
- Auterion launches commercial drone operating system
- Read it on Auterion’s blog
- Listen to InterDrone’s podcast interviewing Lorenz Meier
- NXP joins Dronecode as a Gold member
- Sony Electronics joins Dronecode to broaden industrial camera integration
- Read it on our blog
- AirMap introduces the AirMap Platform SDK, compatible with Dronecode through QGroundControl
- Read it on AirMap blog
- Arm showcases on-going collaboration with Dronecode
- Read it on our blog
Thank You!
We’d like to again give a big THANK YOU to all the sponsor member companies of InterDrone 2018 for your generous support.

What’s next?
We will be exhibiting at AUVSI Xponential 2019 (April 29 – May 2, Chicago). If you’re interested in co-marketing and partnership opportunities with us, contact Ramon Roche, Dronecode Program Manager.
Follow us on social media
Twitter @dronecode
Facebook @dronecodeproject
LinkedIn @dronecode
Subscribe to our monthly newsletter
InterDrone 2018, Las Vegas, NV: We are happy to have Arm, Dronecode silver member and InterDrone sponsor, collaborating on a joint roadmap of activities to support the Dronecode Project and community. Arm is an active contributor to Linux and many other open source projects that span a vast range of markets including mobile, embedded, Internet of Things(IoT), networking, infrastructure, and cloud computing. Working together with Arm, we will help to shape the future of open source software and support the growing need for developer resources and training.
The Dronecode Project is the vendor agnostic home to the open source PX4 autopilot, the industry leading open source autopilot already trusted by leaders in the drone space such as Yuneec, Wingtra, and AirMap. PX4 supports the Arm® Cortex®-M3, Cortex-M7, Cortex-A9, and Cortex-A53 processors, enabling a wide range of Arm ecosystem partners. Beyond the work we’re doing for InterDrone, we’ve also engaged in a number of successful joint activities, throughout the first part of this year, including:
Dronecode joins Arm at Embedded World
Last February, we joined Arm in Nuremberg for Embedded World. We had the opportunity to promote the Dronecode community and open source technologies under the project.


Capital Factory Interactive Industry Insider panel by Arm
In March, PX4 project maintainer, Daniel Agar, and Auterion’s Jinger Zeng joined the “Developing drones and rovers to enhance our cities” panel, organized by Arm during SXSW Interactive (Austin, Texas). We had the opportunity to discuss the current state of the drone industry, and promote open source technologies to build real-world solutions.

Arm Innovator Asia
In June, Auterion’s Jinger Zeng travelled with Arm across Asia with the Arm Innovator Asia tour, to meet local developer ecosystems and evangelize different technologies in IoT, industrial, automotive, artificial intelligence, deep learning, computer vision, unmanned aerial vehicles, robots and drones.

Autonomous Robot Challenge
Currently PX4 compatible flight controllers are being listed as suggested hardware for the “Autonomous Robot Challenge” hosted by Arm. This challenge has over 200 submissions, from 500 participants globally. We are excited to see how developers will use advanced hardware kits, sensors, computer vision, and deep learning based on Arm technologies, to build drones that can address real world applications. There is still time to apply for a chance to win one of the many prizes.
InterDrone 2018 and going forward
Dronecode aims to showcase our growing ecosystem and community, by providing unique educational content for InterDrone attendees, keynotes, panels, classes, and hands-on demos.
This announcement and the ongoing collaboration with Arm highlights our commitment to do more developer activation events in the future. Dronecode will undoubtedly support with the curation of workshops, webinars, live streams, guides, and engineering blog posts, to support the growing base of developers.
Come and find Arm at Dronecode’s booth! If you want to know more about our joint activities sign up for Arm’s Innovation newsletter.
InterDrone is the leading conference and exposition for the drone industry in North America, hosted at the Rio All-Suite Hotel and Casino in Las Vegas, NV from September 5-7, 2018.
Follow us on social media
Twitter @dronecode
Facebook @dronecodeproject
LinkedIn @dronecode
Subscribe to our monthly newsletter
The Dronecode Project welcomes NXP Semiconductor as a Gold member. NXP joins a growing ecosystem and community of developers, end-users and technology companies. Dronecode serves as the vendor-neutral home for open source technologies like PX4®, QGroundControl®, and MAVLink.
NXP (NXPI, NASDAQ) is the world leader in secure connectivity solutions for embedded applications. NXP drives innovation in the secure connected vehicle, end-to-end security, privacy and smart connected IoT solutions markets.
Automotive-grade technology for drones and rovers
As the #1 automotive semiconductor supplier, NXP’s automotive and industrial technologies power cars today and drive autonomous vehicles of the future. The same technologies are in demand for industrial-grade drones, rovers and other small autonomous vehicles. NXP’s comprehensive drone and rover program solutions portfolio includes microcontrollers, processors, security and authentication, networking, sensors interface, and RF power components.
With decades of experience in radar, aerospace, RF, security, motor control, and battery management systems, NXP provides semiconductor solutions for every aspect of drone and rover development. Some solutions include:
- MCUs and MEMS sensors for flight controllers.
- Advanced multi-core MPUs for vision and radar processing systems.
- Brushless DC motor control solutions including field oriented control.
- Analog battery management, wireless charging, and power supply.
- Rugged automotive CAN bus and 2wire AVB Ethernet transceivers.
- Vehicle-to-vehicle and vehicle-to-infrastructure (V2X) technology.
- Security, authentication and inventory management using NFC and RFID.
”"NXP is excited to join and support the Dronecode Project. This vibrant open source community is crucial to collaboration on research and development that advance the commercial drone industry, we look forward to sharing our insights, connecting the community ecosystem to industry partners, and bringing unprecedented access to automotive-grade autonomous vehicle technology used by carmakers."
Iain GallowayDrone Program lead, Systems Innovation within NXP Semiconductor
HoverGames hardware and coding challenges: Coming November 2018
Coming by end of the year, anyone anywhere — engineers, developers, programmers, tech enthusiasts and students around the world — can buy a low-cost, high-quality drone development kit and join a HoverGames challenge, a series of hands-on embedded hardware and coding challenges. Participants will learn drone development skills and design a small autonomous vehicle that can tackle real-world societal problems, from search and rescue to environmental cleanup.
The Hovergames drone platform is an open, modular development system which allows hands-on experimentation with both hardware and software. At home on your desk or in the classroom, it is a great low cost and complete starting point for working with Dronecode software and learning about PX4 code development.
Join us at InterDrone 2018
Dronecode aims to showcase our growing ecosystem and community, by providing unique educational content for InterDrone attendees, Keynotes, Panels, Classes, and hands-on demos.
Joining Dronecode at InterDrone, NXP will demonstrate their newest technologies together with Dronecode members Airlango, Auterion, AirMap, and UVify at booth 822.
InterDrone is the leading conference and exposition for the drone industry in North America, hosted at the Rio All-Suite Hotel and Casino in Las Vegas, September 5-7.
The three-day conference attracts drone service providers, engineers, developers, end-users and manufacturers from all over the world to discuss trends and developments in the commercial drone space.
Follow us on social media
- Twitter @dronecode
- Facebook @dronecodeproject
- LinkedIn @dronecode
- Subscribe to our monthly newsletter
Sony Electronics Inc., a worldwide leader in 4K technology, announced its membership in the Dronecode Project, the vendor-neutral home for open source technologies like PX4®, QGroundControl®, MAVLink, and DronecodeSDK.
Sony Visual Imaging Solutions Group, located in San Jose, California, promotes a wide range of industry-leading, Industrial compact video and still camera products that offer advanced, high-resolution image capture capabilities to developers of commercial drone and robotic systems. By joining Dronecode, Sony will encourage the integration of its sophisticated, remote controlled, industrial cameras into a myriad of unmanned aerial systems within the commercial drone market. By way of example, many of Sony’s latest industrial camera products support stabilized telephoto optical zoom capability, as well as live view streaming and high-resolution local image storage. These provide high-quality image collection for a variety of the drone industry emerging verticals such as commercial inspection, mapping, remote sensing, and search and rescue applications. Sony’s broad industrial camera product offering includes these recently launched products:



")



- FCB-ER8550
- 4K Functional Camera Block with 30x Equivalent Optical Zoom and External Synchronization
- FCB-ER8530
- 4K Functional Camera Block with 30x Equivalent Optical Zoom
- FCB-ES8230
- 4K Functional Camera Block with 20x Equivalent Optical Zoom and Optical Image Stabilization
- FCB-EV7520A
- 1080P60 Functional Camera Block with 30x Equivalent Optical Zoom and Wide Dynamic Range
- DSC-QX30U
- 20M Pixel Compact Lens Style Camera with Integrated 30x Optical Zoom
- UMC-R10C
- 20M Pixel Compact APS-C Industrial Camera with E-Mount
- UMC-S3CA
- 12M Pixel Full-Frame Industrial Camera with 4K Video Output and ISO 409,600 Low Light Capability
- XCL-SG1240C
- 12M Pixel Camera LinkTM Camera with High Frame Rate and Precise Remote Triggering
- XCG-CG510C
- 5.1M Pixel GigE Vision 2.0 Camera with High Frame Rate and Precise Remote Triggering
- XCG-CG240C
- 2.4M Pixel GigE Vision 2.0 Camera with High Frame Rate and Precise Remote Triggering
- XCG-CG160C
- 1.6M Pixel GigE Vision 2.0 Camera with High Frame Rate and Precise Remote Triggering
- XCU-CG160C
- 1.6M Pixel USB3 Vision Camera with High Frame Rate and Precise Remote Triggering
As Sony continues to innovate in the industrial camera market, SDKs and development tools will be made available to qualified Dronecode member companies to meet emerging requirements in the remotely piloted vehicle marketplace.
”“Sony is excited to join the Dronecode Project which we believe will have a major, positive impact on the future development of commercial drones offering unique, value-added capabilities. Sony’s product line of robust, high-resolution industrial cameras provides reliable, consistent, high-quality, image capture capabilities for a wide variety of use cases.”
John MontiDirector of Visual Imaging Solutions at Sony Electronics, Inc.
Follow us on social media
- Twitter @dronecode
- Facebook @dronecodeproject
- LinkedIn @dronecode
- Subscribe to our monthly newsletter
InterDrone is the leading conference and exposition for the drone industry in North America, hosted at the Rio All-Suite Hotel and Casino in Las Vegas, NV from September 5-7, 2018. The 3-day conference attracts drone service providers, engineers, developers, end-users and manufacturers from all over the world to discuss trends and developments in the commercial drone space.
Dronecode, serving as the vendor-neutral home for open source drone software projects PX4, MAVLink, QGroundControl, and the Dronecode SDK, aims to showcase our growing ecosystem and community, by providing unique educational content for InterDrone attendees on how we foster open collaboration among industry leaders, developers, end-users, and vendors.

On the Expo Floor
Exhibiting at Booth 822, our members NXP, Auterion, Airlango, and AirMap will demo their latest solutions based on the Dronecode stack.
About NXP – NXP is a broad supplier of industrial and consumer semiconductors and is the largest supplier to the automotive industry. The NXP Drone and Rover program provide the appropriate solutions and components to support the current and future needs of the growing drone industry.
About Auterion – Auterion builds the open source operating system for commercial drones.
About Airlango – Airlango specializes in advanced perception and intelligence for robots and drones.
About AirMap – AirMap provides out-of-the-box UTM service modules for the global drone market.
We are also running a fun “Dronecode Passport” program sponsored by Dronecode member UVify, where attendees can enter a raffle to win a Uvify drone by collecting stamps from visiting all the Dronecode members on the exhibit floor (3DR, Yuneec, Wingtra, Sentera, Optelos); our member Uvify sponsors the prize and program.

About Uvify – UVify is a manufacturer of award-winning, high-performance, ready-to-fly drones for research and other applications.
At the Conference
On Sept 6 morning, we will be hosting a special panel discussion with technical leaders from NXP, Auterion, Airlango, and AirMap to discuss:
- How companies in the ecosystem work together to cover all the knowledge gaps instead of one company having to hire all the expertise.
- How chip vendors, software service providers, sensor technology companies gain access to drone market by working with the Dronecode community.
- How the consortium operates to set technical directions with open standards.
- How member companies benefit from this collaborative ecosystem and minimize transactions costs with integrations.

On Sept 6 afternoon, we invited senior engineers and business executive speakers from our ecosystem to give a class on how to leverage open source drone technologies. They will bring practical advice and real-world examples to provide attendees useful takeaways from a product development perspective and business value creation standpoint.


On the Stage
This year, three thought leaders from our ecosystem will share their visions for the industry on the keynote stage at InterDrone. View the speaker profiles here.

After-Hour
Lastly, we are hosting a Community Appreciation Night at Guy Fieri’s El Burro Borracho inside the Rio. Join the Dronecode community, speakers, developers, members, and friends in celebrating our recent progress. Free event with limited availability, make sure you RSVP now!

Follow us on Social for Announcements and Live Updates.
We are preparing exciting news to share during InterDrone, new membership announcements and news from our members. If you couldn’t make it to the show this year, don’t worry, make sure to follow us on social media for live updates:
Twitter: @dronecode
Facebook: https://www.facebook.com/dronecodeproject/
LinkedIn: https://www.linkedin.com/company/dronecode/
For more information, visit https://www.dronecode.org/interdrone/

As announced earlier this year, Pixhawk 4 is now available for purchase directly through our member Holybro, in both plastic and aluminum case versions. Pixhawk 4 is the latest update to the Pixhawk family of flight controllers and the first based on the FMUv5 standard.
We’d like to thank all the developers who participated in the beta launch program for providing feedback on the product and user experience. The community gave valuable input such as where they’d like to see the hardware being available for purchase, and we’re making an effort to ensure that the hardware becoming more ubiquitous on the market, so more developers around the world can have easy access to the tools they need to create and innovate! Join the #pixhawk4 slack channel for more discussions and suggestions. (If you haven’t signed up to our Slack community, join for free today by signing up here.)
Read more about the Pixhawk 4® at the Pixhawk.org blog.
PX4 v1.8.0 Ready
Pixhawk 4® ships with PX4 v1.8 pre-installed, this PX4 version features VIO, Obstacle Avoidance as well as many performance improvements.
Other flight controller products coming soon based on the Pixhawk FMUv5 standard that will also run PX4 v1.8 include Pixhawk 4 mini (by Holybro) and the Pixhack v5 (by CUAV).
Read more on the PX4 v1.8.0 release here.
Revamped Pixhawk.org website
The new Pixhawk.org is a single placeholder for everything Pixhawk, from standards, news, to docs. Visit pixhawk.org and let us know what you think. The team is looking for use cases and user stories to share with the community, if you would like to participate in a guest blog for either Pixhawk.org or Dronecode.org, please share your story on our discussion forum.
The Autonomous Robot Challenge
Supporting this launch, our member Arm has a new “Autonomous Robot Challenge” with Hackster.io where they feature Pixhawk 4® as a valid platform for the challenge.

Hackster and Arm are inviting innovators from our community to participate in this new challenge – building autonomous machines to push the limits of what low-cost, open-source hardware and deep learning on the edge can do for humanity. Thousands of dollars in the form of cool hardware are given away as prizes! If you are interested in participating in this exciting contest, join the #hackster channel on our Slack
]]>
The joint Dronecode community of members and contributors is delighted to announce the release of PX4 1.8. This release marks a milestone in the development of the platform and hopes to bring stability and performance improvements. This release is also the first one to include significant autonomy improvements in VIO and obstacle avoidance. It took 1,755 commits with the help of 31 contributors and thousands of flight hours across all of our supported hardware platforms to finalize PX4 v1.8.
(The above Obstacle Avoidance demo is running on Intel® Aero Ready to Fly Drone.)
Main features and improvements
- Fusion of Visual Inertial Odometry in EKF2 (video)
- Interface for external Obstacle Avoidance systems (video)
- Significantly improved performance on racing drones (users need to reconfigure, link)
- Improved filtering and reduced control latency
- Added Airmode
- Improved flight performance on VTOL (Tiltrotors, Tailsitters)
- Support for building natively on Windows (link)
- Significant EKF2 improvements
- hardening of the estimator for situations where GPS accuracy is limited
- improved sensor selection logic enabling simultaneous use of optical flow and GPS
- added the EKF2_MAG_TYPE parameter for environments with high magnetic interferences
- Wind Estimator
- Support for structure scanning
- High Latency telemetry support (Iridium)
- Precision landing framework (including IRLock driver)
- Click here for the full list of changes
New Supported Hardware
The list of supported hardware keeps growing, we added support for the following hardware on this release:
- FMUv5: Pixhawk 4 and Pixhawk 4 mini from Holybro and Pixhack v5 from CUAV
- Crazyflie 2.0 with optical flow deck
- Omnibus F4 SD
- Snapdragon 8074 with VIO enabled (video, 820 support coming)
- IRLock sensor for precision landing
- ST LPS22HB barometer driver
- Analog devices IMUs (ADIS16477, ADIS16448)
- TeraRanger Evo 600Hz support
- Click here for the full list of supported hardware
Download
You can flash the v1.8.0 release from QGroundControl or download the binaries for your platform directly from the v1.8.0 release tag
Feedback
If you have any feedback you would like to share here are some options:
- Join us on Slack and as us on the #release channel
- Open an issue on Github
- Create a discussion on our forums

Industry Survey: Electric Propulsion Systems
We are partnering with Silver member Zubax Robotics on a quick Survey to understand the current needs of the ecosystem, help us by answering a few questions. All Dronecode project members will have free access to the results of the survey.
![]() Zubax Robotics does research, design, and manufacturing of highly energy-efficient motor controllers and integrated drives for aerospace applications. One of our primary goals is to deliver better motor controllers for the Dronecode ecosystem and to advance our research and better serve the needs of the industry; we created a survey that will help us capture some of the needs of the ecosystem. The obtained data will be used to optimize our solutions for the current and future needs of the ecosystem and help us alleviate one of the most significant issues of battery-powered UAV, limited endurance.
Zubax Robotics does research, design, and manufacturing of highly energy-efficient motor controllers and integrated drives for aerospace applications. One of our primary goals is to deliver better motor controllers for the Dronecode ecosystem and to advance our research and better serve the needs of the industry; we created a survey that will help us capture some of the needs of the ecosystem. The obtained data will be used to optimize our solutions for the current and future needs of the ecosystem and help us alleviate one of the most significant issues of battery-powered UAV, limited endurance.

We are proud to announce Pixhawk 4 will be shipping by early May!
Pixhawk 4 is the latest update to the successful family of Pixhawk flight controllers, designed and developed in collaboration with Dronecode® member Holybro® and the PX4® team. It is based on the FMUv5 reference design that was developed by the community at end of 2016 and has been available to all manufacturers. The Pixhawk 4 comes preinstalled with the latest stable version of PX4 (v 1.7) enabling developers to get started quickly with the Dronecode platform.
We are excited to introduce this new hardware to our community. Pixhawk has a rich history, and has evolved through several product generations since its inception. It is widely adopted by academic and industry developers for its flexibility and its quality that rivals autopilots that cost a multiple of it. With the input from Pixhawk developers and users, this latest update includes more performance, advanced reliability, and better integration capabilities.
The Pixhawk 4, features a 32 Bit Arm® Cortex®-M7 with 216MHz, 2MB memory, and 512KB RAM. It has more computing power and 2X the RAM and memory compared to previous versions. This allows developers to go beyond of what is possible today and focus on building the best flight algorithms.
Full user manual will be available soon on the PX4 dev guide. The hardware will be available for ordering online at Holybro’s website.
The PX4 Autopilot as of its latest v1.7 release supports a wide array of flight controllers, click here for a full list of supported hardware.
]]>
February 2018, before our final destination in Nuremberg to attend Embedded World 2018 hosted in the Arm booth, we visited some of our members in Zurich, Switzerland. We learned about their goals and priorities first hand from their teams. It’s probably no surprise to anyone reading but they love PX4.
There was a sense of community. PX4 and Pixhawk were both created here, and you still feel this heritage. Quite an impressive local ecosystem is the result of that. Some of the companies are among the leaders in their fields. The highly trained talent pool, especially in the areas of robotics, control systems, and computer vision is at world level, and it’s no surprise that large companies as Yuneec established an R&D center in Zurich, the city also hosting ETH.
We felt that the companies in Zurich had one thing in common, a passion for building drones. Wingtra had a very focused talent pool working on their latest and greatest, Yuneec had an energetic rhythm with a very advanced team using open source to bring great products to live, Auterion had a close connection to the development community that allows them to support the core development of the platform.
Our final impression is that the companies in Zurich are setting a high bar for the rest of the industry. We will keep an eye on our member companies in Switzerland and are excited of what will come out of the Zurich “Drone Valley.”
Yuneec Research
 Dario Röthlisberger, Martina Rivizzigno, Simone Guscetti, Ramon Roche, and Matthias Grob pose in front of the Yuneec R&D Office in Zurich.
Dario Röthlisberger, Martina Rivizzigno, Simone Guscetti, Ramon Roche, and Matthias Grob pose in front of the Yuneec R&D Office in Zurich.
About Yuneec Research
We were delighted to meet a small but very efficient team focused on highly integrated systems for the drone of products of tomorrow. As you can imagine, with lots of great minds in the same room it’s not hard not to feel inspired by their continued efforts for excellence, this is the team that is behind products like the H520 and the Yuneec SDK, and is actively contributing to every part of the Dronecode Platform.
About the team
With lots of different skill sets being set to work on precision tools for the Drone Industry, their expertise is:
- Visual localization – Estimate drone position using visual input.
- Obstacle avoidance – Detect and safely avoid obstacles.
- Advanced Path planning – Getting the perfect shot, always.
- Flight Control – Guarantee the best forming controller for our drones and tightly working with the PX4 community to help define the API for vision integration.
Their flat hierarchy and dynamic work environment made their office feel like a Silicon Valley startup with lots of real “world-changing” problems to solve and the right mindset. It’s no surprise that ETH is providing top talent to the industry, and you only need to stop by the Yuneec Research office to see how ETH Engineering graduates are fostering an Innovation environment that is working hand to hand with the open source community.
Read more about Yuneec Research on their website yuneecresearch.com, Yuneec in the local Zurich press, follow them on Twitter on @YuneecAviation
Wingtra

Armin Ambühl, CTO, Ramon Roche, and Maximilian Boosfel, COO and Co-founder with the WingtraOne Drone.
About Wingtra
At Wingtra the dedicated team of Wingtranauts (how they like to call themselves) develop, produce and commercialize high precision VTOL drones that collect survey-grade aerial data. Wingtra entered the market in early 2017 and has been selling globally ever since. Recently Wingtra has raised additional $5.8M to meet the demand in 2018 and broadened its global distribution network across all continents.
About their latest launch WingtraOne PPK
The CTO of Wingtra Armin Ambühl told me that with the latest upgrade, Wingtra’s drone WingtraOne PPK can offer something that has never been seen in drone photogrammetry – broad coverage and high resolution at ultra-precise accuracy. “For example, we can map an area the size of 240 American football fields in an hour’s flight, and it’s possible to zoom in and see a coin lying on the ground. And what’s best – we know the exact coordinates of that coin, so we can easily locate it on the field”, explained Armin in simpler words. WingtraOne PPK is already available for customers directly via Wingtra, and it’s distribution network.
Read more about Wingtra on their website wingtra.com, about how they set a new accuracy benchmark in drone photogrammetry, follow them on Twitter @Wingtra.
Auterion

Kevin Sartori, Co-founder at Auterion hands over the Dronecode application to Ramon Roche, Programm Manager at Dronecode in the Auterion office in Zurich.
About Auterion
Auterion is the latest member to join Dronecode. Based in Zurich, they are responsible for most of the active development upstream on the Platform. While we visited we had the opportunity to sign the application form and officially welcome them to the Project, this formalizes their commitment to the open ecosystem.
Who is Auterion
Auterion supports the core development of the Dronecode platform and enables companies in the ecosystem. Auterion partners with leading silicon and service companies to bring the best technologies and integrations to the ecosystem. Offering enterprise support to Dronecode users and release a managed and tested open source distribution of PX4. Auterion is based in Zurich, Switzerland and is co-founded by Lorenz Meier, creator of Pixhawk, founder of PX4 and named MIT Innovator 35 under 35 and Kevin Sartori, UC Berkeley MBA and drone expert from Silicon Valley. Auterion hopes to bring the level of professionalization to drones that Red Hat brought to Linux.
Welcome to Dronecode!
Auterion’s employees have been contributing to the ecosystem for the last decade, authored and created both PX4 and Pixhawk. Today, Auterion wants to enable the industry by connecting the community of developers, contributors, and companies, while creating better technology “the open source way”. With their membership, they want to show their support to Dronecode officially.
Read more about Auterion on their website auterion.com, follow them on Twitter @Auterion.
UPDATE 03/20/18 17:30 PST: adding a complete map of all the different companies that form part of the Zurich drone community.

Source: Simon Johnson, [email protected], 24th November 2017
 The PX4 Autopilot supports a wide array of Flight control hardware from many manufacturers; this post is the first in a series of reports, in hopes of creating a healthy ecosystem that fosters diversity, and also promotes the continuous support of the Dronecode Platform. We thank the manufacturers, service providers, and developers that work hard for continuing to offer a great out of the box experience of their products by using PX4.
The PX4 Autopilot supports a wide array of Flight control hardware from many manufacturers; this post is the first in a series of reports, in hopes of creating a healthy ecosystem that fosters diversity, and also promotes the continuous support of the Dronecode Platform. We thank the manufacturers, service providers, and developers that work hard for continuing to offer a great out of the box experience of their products by using PX4.The flight control hardware below is supported by the latest release of PX4 v1.7, and most of it is being used by our Test Team to verify flight performance and also serve as another protection layer against regressions or unintended changes. Read more on the Test Team, how to request test flights and the hardware available https://dev.px4.io/en/test_and_ci/test_flights.html.
Supported Hardware
The following is a list of the currently supported Flight Control hardware on PX4 as of March 2018.
Pixhawk Series
Open hardware flight controllers that run PX4 on NuttX OS. With many form factors, there are versions targeted towards many use cases and market segments
- Pixhawk
- Pixhawk 2.1 “The Cube”
- Pixhawk Mini
- Pixhawk 3 Pro
- Pixhawk 4 (Coming Soon).
- HKPilot32
- Pixfalcon
- DroPix
- Pixracer
- MindPX
- MindRacer
Autopilots for computationally intensive tasks
- Qualcomm Snapdragon Flight – High-end autopilot with an integrated onboard computer.
- Intel® Aero Ready to Fly Drone – UAV development platform with high-end autopilot and integrated onboard computer.
Sources
- The complete list of hardware https://docs.px4.io/en/flight_controller/
- Hardware reference design https://dev.px4.io/en/debug/reference-design.html
Adding your board to this list
Register your flight controller to be part of the next Supported Hardware report; we would like to hear from you if you currently have hardware that is PX4 compatible/supported.
We try to reach out to all the active companies using PX4, and we are sorry if we missed you, please help us correct this mistake by submitting either of the forms below.
Contact Us
If you have any questions or want more information on Dronecode, please reach out to us via our contact form, make sure you mention this post in your message, we will get back to you as soon as possible.
]]>

Dronecode’s goal is to become the leading open source platform for UAVs. The platform includes the core software components: PX4 (the core autopilot), MAVLink (the communication protocol between drone and the ground), and QGroundControl (the ground control station software). To ensure neutrality and transparency, Dronecode holds all trademarks of core projects.
Using compatible open source hardware like Pixhawk developers could build complete drones in a wide array of shape and airframes. We saw many of them created by our DIY community, by researchers at top universities, and by some of the most successful companies in the industry.
2017 saw the next step in the evolution to become a full software distribution with the addition of 3 key components:
- Autonomy: the next PX4 release includes some of the basic functionalities for vision-based localization and avoidance.
- Middleware: DDS, an industry standard, allows for fast communication between the autopilot and the companion computer and is a crucial enabler for full autonomy.
- Dronecore: the Dronecode SDK is the best way to integrate with PX4 and enable integrations and enhanced/advanced use cases.
Dronecode can be represented as the legal framework holding together all these efforts and unite them under a full software distribution for UAVs. This ensures that everything needed for a complete drone solution is delivered in a product that is well integrated, well tested, easily modifiable and is consistently licensed.
Please reach out to us if you want to contribute to the growing software platform and become part of our community-driven open governance model.
Resources:
]]>The release delivers numerous major features, including
- Experimental support for ROS2-like setups with FastRTPS.
- Support for many new sensors (LIDAR, airspeed, IMU, etc)
- Significant robustness improvements and new features to default estimation system (EKF2)
- Significant improvements to VTOL flight control
- Increased smoothness of multi-copter flight control
- Better performance of fixed-wing flight control
- Many build system improvements (including 50% faster Nuttx builds)
- New continuous integration system (http://ci.px4.io) with significantly more build and testing capacity
- Reduced CPU load and RAM usage
- Plus more tons of minor bug fixes and under the hood enhancements
Click here for the full release announcement and changelog.
China Roadshow

The DroneCode China Roadshow 2017 was a great success!
We had a number of fantastic workshops in Shanghai, Shenzhen, and Beijing. We met up with hundreds of drone users, students, and developers and learned a lot more about how we can better serve our Chinese community.
We also met with many local companies – we’re very excited to announce that we’ve signed up a number of new members as a direct result, and we are going to grow our efforts in China for 2018, we will be back with new events next year.



Click here to read the full China 2017 report.
Meet our new members:

A high-tech company providing R & D, production and OEM services. CUAV develops products including flight controllers, GPS positioning systems, wireless data links, and many more. CUAV wants to get more involved with PX4 and devote more development to the platform, they are providing test hardware to our test teams and developers.

Holybro wants to provide hardware and R&D production services to the Dronecode Platform. They develop and supply competitively priced UAV products to exacting quality standards. Products include flight controllers, GPS systems, telemetry radios and other peripherals.

Sky Drone joined because they want to support the Dronecode Platform from which they depend for their Sky Drone FPV (Celluar based). Sky Drone supply low-latency digital FPV cameras that communicate over 4G / LTE cellular networks.

Manufacture modern aerial robotic aviation platforms including helicopters with intelligent flight control systems. Ziyan believes in Open Source software, they want to support the Dronecode Platform and enable it in their hardware.
Contributions
This month the project pulse shows we’ve merged 86 PRs (-1) and closed 60 issues (+8). 6341 lines were added and 25015 were deleted. We also published PX4 v1.7.

Flight Testing
These are the flight testing stats since the last newsletter (Nov 01 – December 16):
- 226 commits tested.
- 1457 total flights.
- 31 daily flights (average).
- 0 major issues found.
- 7 releases tested
- 7 PR’s
- https://github.com/PX4/Firmware/pull/8276
- https://github.com/PX4/Firmware/pull/8325
- https://github.com/PX4/Firmware/pull/8340
- https://github.com/PX4/Firmware/pull/8343
- https://github.com/PX4/Firmware/pull/8384
- https://github.com/PX4/Firmware/pull/8412
- https://github.com/PX4/Firmware/pull/8418
- 16 vehicles total.
]]>
The TSC Working Groups provide brief summary updates here. More detailed monthly status updates may be found in the Dronecode blog here.
SDK WG
The SDK WG has made significant progress this month:
- DroneCore gRPC bindings moving forward for multiple language support:
- Support for Python has been added along with examples: https://github.com/dronecore/DroneCore-Python
- Dynamic Plugin loading has been implemented: https://github.com/dronecore/DroneCore/pull/143
- Follow Me Plugin has been added
- https://github.com/dronecore/DroneCore/pull/142
- Documentation added too: API Ref, Guide
- Documentation:
- Added a script for document generation: https://github.com/dronecore/DroneCore/pull/166
- Support for Debian/Ubuntu package generation has been added:
Next Steps:
- gRPC bindings for Java
- Enable Flexible Plugin architecture:
Note: First major release for DroneCore is planned to align with PX 1.8 release (March 2018).
Camera API WG
- Camera control protocol changes have now been documented. Updates may be required following user feedback.
- Common Camera Module for SITL & Drones:
- Design information can be found here.
- Image capture feature was added in camera-streaming-daemon.
- Option to set count and interval missing in QGC.
- Work is progressing on adding support for Gazebo Camera.
- Video Streaming
- MAVLink messages for video streaming have been on hold. Now that camera control message documentation is complete we plan to restart work on the video messages.
Messaging WG
- FastRTPS
- Intel are working on an example of Optical Flow running with FastRTPS on the Intel Aero.
- Micro-ROS
- Initial discussion with eProsima about integrating PX4 with Micro-ROS.
Safety WG
- Progress continues with the FAA on the Partnership for Safety MOU. We hope to finish it in time for it to be announced at CES on Jan 10th.
- Once the partnership is in place, the process of coordinating the various federal stakeholders to gain certification for the Dronecode stack will accelerate.
Code Quality WG
New continuous integration (CI) system with dynamically scaling build capacity via Amazon EC2. This will allow Dronecode to drastically expand the automated testing infrastructure for PX4 Firmware, Dronecore, and even QGroundControl.
The majority of the existing build and test infrastructure has migrated. The next steps are:
- new mission test framework with Dronecore
- add code coverage
- work with PX4 Firmware component leads to expand testing coverage
- run tests under sanitizers (address sanitizer, thread sanitizer)
- incorporate hardware testing (HIL)
As image showing the firmware CI build pipe line is shown below (see pipelines).

UX WG
Group activities has been suspended until WG participants have more time available to contribute.
 We are happy to announce the release of PX4 v1.7.0, this minor version comes packed with performance and quality of life improvements, in 1840 commits with the help of 76 authors and hundreds of flight hours across all of our certified hardware, this is the biggest release of PX4 to date.
We are happy to announce the release of PX4 v1.7.0, this minor version comes packed with performance and quality of life improvements, in 1840 commits with the help of 76 authors and hundreds of flight hours across all of our certified hardware, this is the biggest release of PX4 to date.
This release couldn’t have happened without the help of our supporting members, developers, and partners that help us every day, from planning to execution, we are grateful for this community and hope you enjoy flying PX4 v1.7.0.
Major Features
- First-generation experimental support for ROS2-like setups with FastRTPS
- Support for many new sensors (LIDAR, airspeed, IMU, etc)
- Significant robustness improvements and new features to default estimation system (EKF2)
- Significant improvements to VTOL flight control
- Increased smoothness of multi-copter flight control
- Better performance of fixed-wing flight control
- Many build system improvements (including 50% faster Nuttx builds)
- New continuous integration system (http://ci.px4.io) with significantly more build and testing capacity
- Reduced CPU load and RAM usage
- Plus more tons of minor bug fixes and under the hood enhancements
- Full list of changes
Download
You can flash the v1.7.0 release from QGroundControl or grab the binaries for your platform directly from the v1.7.0 release tag
Feedback
If you have any feedback you would like to share here are some options:
- Join us on Slack and as us on the #release channel
- Open an issue on Github
- Create a discussion on our forums

We are coming to China!
Dear Dronecode followers,
The Chinese Dronecode ecosystem is growing at a blazing speed. To meet this demand and answer the community’s questions we are coming to China December 11th-16th for a series of meetups with our members and ecosystem partners.
Join us to learn about the Dronecode and PX4 flight stand and how to collaborate in the open source ecosystem. We will be in:
- December 11th, Shanghai @ WeLabs,
- December 12th, Shenzhen @ SimplyWork
- December 16th, Beijing @ Beihang University
Agenda
- Introduction (10 minutes)
- “The completely open source drone software platform. How can you participate in the huge ecosystem?” – Dr. Lorenz Meier (40 minutes)
- “How to make the most of open source as a collaborative R&D model.” – Kevin Sartori (30 minutes)
- “The Dronecode ecosystem in China.” – Stone Bai / Jinger Zeng (15 minutes)
- “Model-based design, development, and safety testing for PX4 based UAVs.”Prof. Quan – Only at Beijing Meetup (30 minutes)
- Panel and Q&A with speakers and member companies (30 minutes)
- Networking over drinks and appetizers afterward
Locations
Shanghai
Dec. 11th 6:00pm – 9:00pm
WeLabs, No. 800 Naxian Lu, A-9, Pudong New Area
Shenzhen
Dec. 12th 6:00pm – 9:00pm
SimplyWork, No. 1 Kefa Road, 3F, Nanshan District
Beijing
Dec. 16th 3:00pm – 5:30pm
Beihang University, Building M, Room 101, Beihang Technical University

November Newsletter.
Dear Dronecode Members,
Read below to find all the news!
Meet our new members.
![]()
Traffic awareness and collision avoidance technology for UAVs (and other aircraft). With FLARM installed, the vehicle is alerted of both traffic and imminent collisions with other aircraft, so action can be taken before it is too late.
![]()
Advanced, fully programmable, flight controller hardware and a development platform for swarming UAV systems.
Dronecode present at DARPA Hackfest in NASA Ames

In November, Dronecode participated in the four-day DARPA Hackfest at NASA Ames in Mountain View, CA. The objective of the Hackfest was to use open source drones and software-defined radios (SDRs) to improve communications and security in multi-drone missions. Using 3DR Solos, RaspberryPis and Ettus B200 radios, teams set out to accomplish three missions: range extension, handoff from one ground control station to another, and advanced payload integration. Dronecode Chairman Chris Anderson keynoted the event and presented on how the teams’ work aligned with the overall Dronecode roadmap and how to continue participating with the Dronecode teams after the hackfest.
Dronecode China Roadshow 2017

Early next month we are planning on a tour of China to meet with our member companies and extend the ecosystem with new partners and developers from China, we are still finalizing the plans for this trip and will send a follow-up email with more concrete information.
If you would like to schedule a meeting or participate in our tour send us an email at [email protected] with your company name and contact details.
Weekly Developer Call.
Our weekly developer call happens every Wednesday at 5 pm CET (UTC +1), join our core developer team and members of the community and shape the direction of PX4.
Ever had a question you wanted to ask the developers of PX4? would you like to see a topic addressed by the community? The weekly call is the just the place for such questions, add your topics to the weekly agenda and join us at the meeting, we will make sure your voice is heard.
Our weekly agenda is posted on our discourse forums under the weekly-dev-call category, where you will find the dial-in address and this weeks agenda.
Join us on Slack.

Are you a member of our online community on Slack yet? Don’t get left out and join the developer team plus more than 500 Dronecode Platform developers on Slack or ever-growing community where you will find out the latest news and will be able to interact with like-minded developers and companies from the ecosystem.
What are you waiting for? join today for free on http://slack.px4.io/ and if you are already a member don’t forget to say hi on #general and explore all of our available channels.
PX4 1.7 Release (Almost There!)
We are almost ready to release the next stable version of PX4, this one took a few more weeks than we expected but we are taking our time to ensure the safety and stability of our release, you can review the current open items on our milestone below.
- Github Milestone – the dev team is doing a final pass through the milestone tracker to make sure we aren’t leaving anything behind and also assess which features should be delayed or cut from this release
- Release planning is happening on the dev call, as a reminder, the dev call happens weekly on Wednesdays at 8:00 AM PST
- There’s a workflow change proposal made by members of the core dev team, we are looking for feedback.
- The roadmap for the platform is found here, we are looking for feedback on the 1.7 & 1.8 releases
Documentation updates.
Since our last newsletter, we’ve made many updates and additions to the documentation. A few highlights include:
- Addition of a new header bar across all DroneCore sites and documentation, making it easier to navigate between the different platform resources.
- Started cleaning up the legacy QGroundControl site. All old QGroundControl documents have been migrated to the new libraries or deleted (MAVLink docs still to be ported).
- Major update to Korean translations of DevGuide catches up 4 months of changes.
Working group updates.
Most of the Working Groups are active and lots of progress has been made. Here is a brief overview.
- Camera control protocol changes have been merged into to QGroundControl.
- Intel to share details of drone apps processor code – https://github.com/01org/camera-streaming-daemon
- SITL camera module development
- Proposed design in progress- https://docs.google.com/document/d/1kO76jjzYUoPWLmHh6GNb2AVWQLo_A9ZCtZaboYj2-Kk/edit?usp=sharing
- Gets frames from Gazebo camera
- Video Streaming
- Mavlink messages for video streaming delayed until docs for camera control complete
The SDK WG has made significant progress this month:
- Dronecore gRPC bindings moving forward for multiple language support
- Docker image to be created for development using Dronecore
- Documentation of DroneCore C++ API moving forward and has near-complete coverage.
- Need a software designer look at the design of DroneCore for vendor extensibility.
- PX4 1.8 Needs to support extensibility
- Offboard Control API added
- PR for API documentation: https://github.com/dronecore/docs/pull/53
- The messaging WG will also be working with the SDK WG to evolve the SDK in ways that may not work well over MAVLINK.
- The biggest missing piece of the RTPS support is broader testing
- eProsima is going to have a look at this.
- The VIO samples using RTPS should be completed
- RTPS refactoring
- https://github.com/PX4/Firmware/pull/8113
- Serialization code should be pre-generated in its own layer so the Agent code need not depend on all of Firmware and its submodules
- FAA Application for Dronecode stack certification with Intel. Upcoming calls, but still moving forward.
- FAA not concerned with security but other agencies are (ala DJI). Talking to other agencies about security issues (XCOM, Dept of Interior, EPA, etc).
- Concern voiced about safety of a platform not addressing platform security and data security
- Threat analysis needed
- Opportunity for transparent process of how data is handled by the platform
- Discussed using ROS2 security model and also supporting proprietary solutions (e.g. FLIR, INSITU)
- Progress in Code Quality is being made on several fronts:
- Architecture Refactoring
- NuttX update that was previously blocking other refactoring work has been merged
- I2C NuttX drivers are now cross-platform via vdev. SPI devices not supported yet (missing a handful of things in drivers/device).
- PX4 v1.8 release targeted for refactoring the drivers to use vdev and hopefully moving DriverFramework drivers to use vdev.
- Rearchitecture proposals for vendor layers were prototyped and provided for comments
- Latest one is here: https://github.com/PX4/Firmware/issues/8127
- Proposal for Offboard Module Architecture
- HW Support
- Not clear to new users what HW platform they should start with
- List what is known good HW
- RPi – best effort vs Intel Aero (supported)
- Need new categories
- Experimental HW
- Unmaintained HW (mfg’s who create non-compliant products, poor build quality)
- Supported HW
- Need quality standards for HW vendors to self-certify
- Test infrastructure
- Significant work on test infrastructure to allow scaling of automated testing. Work in progress.
- Group Activities has been suspended until WG participants have more time available to contribute.
Flight testing.
These are the flight testing stats since the last newsletter (July 28 – August 28):
- These are the flight testing stats since the last newsletter (Sep 27 – October 31):
- 756 commits tested.
- 1205 total flights.
- Pixhawk mini (DJI F450): 258
- Pixhawk 3 Pro (DJI F450): 274
- Pixracer (DJI F450): 208
- Pixhawk 1 (DJI F450): 294
- Pixhawk mini (Phantom FW): 49
- Pixhawk 3 Pro (VTOL): 12
- Snapdragon PWM-ESC (QAV 250): 30
- Intel Aero Ready To Fly Drone: 23
- Yuneec H520: 55
- 50 daily flights (average).
- 1 major issues found.
- 4 PR’s tested:
- 16 vehicles total.
Contributions.
This month the project pulse shows we’ve merged 87 PRs (+7) and closed 52 issues (+16). 37119 lines were added and 35886 were deleted.

Members of the Dronecode team.

The TSC Working Groups provide brief summary updates here. More detailed monthly status updates may be found in the Dronecode blog here.
SDK WG
The SDK WG has made significant progress:
- Dronecore gRPC bindings moving forward for multiple language support
- Docker image to be created for development using Dronecore
- Documentation of DroneCore C++ API moving forward and has near-complete coverage.
- Need a SW designer look at the design of DroneCore for vendor extensibility. Currently task on hold due to lack of developer bandwidth.
- Release 1.8 should support extensibility
- Offboard Control API added
- Example: https://github.com/dronecore/DroneCore/pull/134
- PR for API documentation: https://github.com/dronecore/docs/pull/53
Camera API WG
- Camera control protocol changes have been merged into to QGroundControl.
- Intel to share details of drone apps processor code – https://github.com/01org/camera-streaming-daemon
- SITL camera module development
- Proposed design here (in progress)
- Gets frames from Gazebo camera
- Video Streaming
- Mavlink messages for video streaming delayed until docs for camera control complet
Messaging WG
- The messaging WG will also be working with the SDK WG to evolve the SDK in ways that may not work well over MAVLINK.
- The biggest missing piece of the RTPS support is broader testing
- EProsima is going to have a look at this.
- The VIO samples using RTPS should be completed
- RTPS refactoring
- https://github.com/PX4/Firmware/pull/8113
- Serialization code should be pre-generated in its own layer so the Agent code need not depend on all of Firmware and its submodules
Safety WG
- FAA Application for Dronecode stack certification with Intel. Upcoming calls, but still moving forward.
- FAA not concerned with security but other agencies are (ala DJI). Talking to other agencies about security issues (XCOM, Dept of Interior, EPA, etc).
- Concern voiced about safety of a platform not addressing platform security and data security
- Threat analysis needed
- Opportunity for transparent process of how data is handled by the platform
- Discussed using ROS2 security model and also supporting proprietary solutions (e.g. FLIR, INSITU)
Code Quality WG
Progress in Code Quality is being made on several fronts:
- Architecture Refactoring
- NuttX update that was previously blocking other refactoring work has been merged
- I2C NuttX drivers are now cross platform via vdev. SPI devices not supported yet (missing a handful of things in drivers/device).
- PX4 v1.8 release targeted for refactoring the drivers to use vdev and hopefully moving DriverFramework drivers to use vdev.
- Rearchitecture proposals for vendor layers were prototyped, and provided for comments
- Latest one is here: https://github.com/PX4/Firmware/issues/8127
- Proposal for Offboard Module Architecture
- HW Support
- Not clear to new users what HW platform they should start with
- List what is known good HW
- RPi – best effort vs Intel Aero (supported)
- Need new categories
- Experimental HW
- Unmaintained HW (mfg’s who create non-compliant products, poor build quality)
- Supported HW
- Need quality standards for HW vendors to self certify
UX WG
Group activities has been suspended until WG participants have more time available to contribute.
Dear Dronecode Members,
September marks one of the most successful months in Dronecode’s history, thanks to the ever growing community and supporting members.
Read below to find all the news!
DroneCore the MAVLink API you’ve been waiting for.
Dronecode is excited to announce the creation DroneCore, our new open-source MAVLink Library for the PX4 flight stack.
 The library provides a simple core API for managing one or more vehicles, providing programmatic access to vehicle information and telemetry, and control over missions, movement and other operations. Developers can extend the library using plugins to add any other required MAVLink API.
The library provides a simple core API for managing one or more vehicles, providing programmatic access to vehicle information and telemetry, and control over missions, movement and other operations. Developers can extend the library using plugins to add any other required MAVLink API.
Reporting back from InterDrone
We are back from Vegas after a successful talk by Dr. Lorenz Meier and Ramón Roche our Program Manager. We are happy to report a very successful event, we met with some of our members and had very productive conversations with everyone from the industry.
On Thursday, September 7th we gave a talked titled: “The Complete End-to-End Open Source UAV Platform”, we promoted our platform and made clear our goals for the upcoming releases and made sure to promote our partners.

Dr. Lorenz Meier illustrates the Dronecode platform growth and showcases some of our member platforms.

Slides from our presentation at this years InterDrone marks the release of DroneCore and a great year for Dronecode and members.
U-Space Drone Traffic Management Takes Off in Switzerland

U-space is Europe’s vision for a traffic management system that will support safe, efficient, and secure access to European airspace for millions of drones. Like the U.S. “Unmanned Traffic Management” initiative, U-space is a collaborative effort to enable the integration of drones into the low-altitude airspace. On September 14th, Europe’s first live demonstration of U-space took place on Lake Geneva, Switzerland.
For Dronecode/PX4, the demonstration represents an important step forward in enabling the drone ecosystem, and in the integration through DroneCore with drone app and service providers like AirMap.
Meet our new members:


From their roots as a Swiss Startup, Wingtra has now spread its wings beyond the confines of Switzerland to the US, China and the rest of Europe. Wingtra’s surveying drone combines the ease of use of agile multicopters with the long range of high endurance fixed-wing aircrafts. Their fully-autonomous drone, called the WingtraOne, thrives on years of intelligent and meticulous research done at ETH Zurich in Switzerland.

We are proud to announce that My Drone Services Inc. joined Dronecode as a Silver member, My Drone Services is a company specialized in Drone Technology, they use Drones to deliver creative solutions to their clients.
“My Drone Services is both a commercial services provider and a supporter of Drones for Good. We are interested in the development of Drone Technology broadly because we see the benefits they can bring to clients and to the organizations which we support. We see the technology as a transformative, enhancing safety, making lives better. We also see the negative possibilities of drones placed in wrong hands.
We want to support the creation of open source technology which allows democratization of drone technology and widespread use for good.We are interested in this project because we wish to take active use of the underlying developments for use in our own client needs.” — Leon Shivamber, Chairman
Read more about My Drone Services.

PX4 1.7 Release.
The time is here for a new release of PX4, the dev team is targetting the release of 1.7 for the end of this month, we will begin to start testing release candidates as early as next week.
- Github Milestone – the dev team is doing a final pass through the milestone tracker to make sure we aren’t leaving anything behind and also assess which features should be delayed or cut from this release
- Release planning is happening on the dev call, as a reminder, the dev call happens weekly on Wednesdays at 8:00 AM PST
- There’s a workflow change proposal made by members of the core dev team, we are looking for feedback.
- The roadmap for the platform is found here, we are looking for feedback on the 1.7 & 1.8 releases
- As a reminder, once we start pushing release candidates we will turn the gears on our Flight Testing team, which means things are going to start moving quickly.
- Make sure you are planning ahead if there’s still features you would like to see in PX4 1.7.
Documentation updates.
Since our last newsletter, we’ve made many updates and additions to the documentation. A few highlights include:
- Autopilot hardware docs have moved into the PX4 User Guide here so PX4 users are better informed of flight controller options. The DevGuide was correspondingly updated to cross-link to this information and more clearly explain how to build for each target.
- Lots of DroneCore updates:
- New website: http://dronecore.io/
- New developer guide
- API reference generated from source
- Guide material in progress
Working group updates.
Most of the Working Groups are active and lots of progress has been made. Here is a brief overview.
- The camera API work is now being merged into QGC. Video streaming support is still in discussion.
- Status is at https://docs.google.com/
document/d/ 1sVPLlwJ0gX0oErBFd96_FSS_ mmHhb0h-N-JfoLN-oK8/edit# heading=h.i7btdrk1jebx - Camera API merged to QCG: https://github.com/
mavlink/qgroundcontrol/pull/ 5713 - Intel Aero Camera Daemon Support: https://github.com/
01org/camera-streaming-daemon/ pull/83
The SDK WG has made significant progress this month:
- The SDK strategy to support multiple vendors with customized SDKs based on DroneCore is still a work in progress on.
- An introspectable API is needed.
- Work is ongoing for gRPC support for multiple language bindings.
- Integration of DroneCore into more PX4 CI testing is TBD.
- The meeting has been postponed while several people were out on vacation.
- If the ROS 2 API’s are stable at the beginning of 2018, we can look at adding ROS 2 support to the Dronecode Platform.
- The messaging WG will also be working with the SDK WG to evolve the SDK in ways that may not work well over MAVLINK.
- The biggest missing piece of the RTPS support is broader testing.
- EProsima is going to have a look at this.
- The FAA Part 107 waiver application submitted by the Safety WG, which is the first to formally describe the Dronecode stack to begin the process of certification, has been submitted and is now being considered by the FAA.
- Group Activities has been suspended until WG participants have more time available to contribute.
Contributions.
This month the project’s pulse shows we’ve merged 80 PRs (+26) and closed 36 issues (+4). 36,889 additions and 42,361 deletions.
Members of the Dronecode team.

THANK YOU!
Flight Testing.
These are the flight testing stats since the last newsletter (August 29 – September 26):
- 248 commits tested.
- 831 total flights.
- Pixhawk mini (DJI F450): 135
- Pixhawk 3 Pro (DJI F450): 160
- Pixracer (DJI F450): 192
- Pixhawk 1 (DJI F450): 164
- Pixhawk mini (Phantom FW): 39
- Pixhawk 3 Pro (VTOL): 23
- Snapdragon PWM-ESC (QAV 250): 31
- Intel Aero Ready To Fly Drone: 33
- Yuneec H520: 44
- 41 daily flights (average).
- 1 major issue found.
- 1 releases tested:
- 8 PR’s tested:
- https://github.com/PX4/
Firmware/pull/7744 - https://github.com/PX4/
Firmware/pull/7798 - https://github.com/PX4/
Firmware/pull/7855 - https://github.com/PX4/
Firmware/pull/7866 - https://github.com/PX4/
Firmware/pull/7882 - https://github.com/PX4/
Firmware/pull/7920 - https://github.com/PX4/
Firmware/pull/7960 - https://github.com/PX4/
Firmware/pull/7981
- https://github.com/PX4/
- 15 vehicles total.
]]>
The TSC Working Groups provide brief summary updates here. More detailed monthly status updates may be found in the Dronecode blog here.
SDK WG
- The SDK strategy to support multiple vendors with customized SDKs based on DroneCore is still being worked on. An introspect-able API is needed.
- Work is ongoing for gRPC support for multiple language bindings. Integration of the DroneCore into more PX4 CI testing is TBD.
- The camera API work is now being merged into QGC: https://github.com/mavlink/qgroundcontrol/pull/5713
- Video streaming support is still in discussion. Status is here (google doc).
- Intel Aero Camera Daemon Support: https://github.com/01org/camera-streaming-daemon/pull/83
Messaging WG
- The meeting was postponed as several people were away on vacation.
- If the ROS 2 API’s are stable at the beginning of 2018, we can look at adding ROS 2 support to the Dronecode Platform.
- The messaging WG will also be working with the SDK WG to evolve the SDK in ways that may not work well over MAVLink.
- The biggest missing piece of the RTPS support is broader testing. EProsima is going to have a look at this.
Safety WG
- The Safety WG’s FAA Part 107 waiver application has been submitted and is now being considered by the FAA. This is the first to formally describe the Dronecode stack and begin the process of platform-based certification.
UX WG
The group have suspended activities temporarily while the main participants are occupied with other commitments.
Code Quality WG
Progress in Code Quality is being made on several fronts:
- Rewrite of the Commander module
- Code coverage using gcov
- Architectural redesign for modularity, decoupling, and extensibility.
 We met with Armin Ambühl, CTO, at their headquarters in Zurich, to ask a few questions about their system, the use of PX4, and their membership with Dronecode.
We met with Armin Ambühl, CTO, at their headquarters in Zurich, to ask a few questions about their system, the use of PX4, and their membership with Dronecode.
What is special about the WingtraOne?
Our goal at Wingtra is to make data collection easy and accessible at scale. In the professional market, drones are largely used to gather aerial data. Multicopters like the DJI Phantom are a big success. Virtually no training is required to operate them. However, they can map no more than 80 acres in a single flight because they are inefficient in forward flight. Therefore large areas are mapped by fixed-wing drones. These systems need lots of open space for take-off and landing. Vegetation, rocky grounds or hilly terrain can make operations impossible.
 With the WingtraOne we have developed an unmanned aerial robot that flies like a plane, but takes off and lands vertically. For the first time, drone users get a fixed wing with the usability of a multirotor drone. The WingtraOne flies fully automated so anyone can fly it with very little training and can map 800 acres in one hour. Therefore surveying very large areas on a regular base becomes feasible on a global scale.
With the WingtraOne we have developed an unmanned aerial robot that flies like a plane, but takes off and lands vertically. For the first time, drone users get a fixed wing with the usability of a multirotor drone. The WingtraOne flies fully automated so anyone can fly it with very little training and can map 800 acres in one hour. Therefore surveying very large areas on a regular base becomes feasible on a global scale.
Why did you choose the Dronecode flight stack and PX4?
While we were doing research at ETH we went through the evaluation of different autopilot stacks and even considered writing our own from scratch. In the end, we chose PX4 for the following reasons:
- PX4 was for us the most advanced flight stack for commercial use.
- Its advanced architecture is completely scalable.
- It allowed us to modify and adapt the software to our needs while keeping the core components in line with the advancements of the ecosystem.
We also were impressed by the support in the ecosystem and appreciate the position of Dronecode as a supportive project manager of the ecosystem.
What parts did you customize and what work was necessary?
We customized the flight stack in two different ways. First, we had to make vehicle specific modifications, these include low level controls of the vehicle and specific failure case handlings. On the other side, we invested great effort to build a product with the end customer in mind. This required modifications of the UX of QGroundControl and to the workflow during take-off and landing to make our ground station app, called WingtraPilot, intuitive to use for customers. We also spend considerable time to test the reliability and robustness of our implementation to offer peace of mind to our customers. This also meant that sometimes we left out features and capabilities to focus on what is really important.
Where do you see future collaboration opportunities with Dronecode?
We look at this from a market pull perspective. Our customers are looking for better workflows, particularly in the context of accessing data. Here, the cloud will play an important role in the future. We see collaboration opportunities on open source cloud APIs and we are excited about the development of DroneCore.
Follow Wingtra: https://twitter.com/Wingtra
]]>DroneCore is the best way to integrate with PX4 over MAVLink!

Yuneec have used DroneCore to integrate with the camera and gimbal on the H520
The library provides a simple core API for managing one or more vehicles, providing programmatic access to vehicle information and telemetry, and control over missions, movement and other operations. Developers can extend the library using plugins to add any other required MAVLink API.
The library has already been employed by DroneCode members to solve many important integration use cases:
- AirMap used DroneCore to integrate with their air traffic services as part of the recent U-space traffic management demo, and will shortly be able to make these services available to all PX4 users.
- The Yuneec H520 Hexacopter uses DroneCore to integrate with its camera and gimbal via MAVLink.
In both cases, the users have benefited from having a stable, efficient, consistent and well-tested integration layer to target. They’ve also been able to take advantage of the extensible design and permissive BSD license to customise the APIs as they needed!
At the time of writing DroneCore only has a C++ API. By our first release, we hope to have wrapper layers for Python, Android, and iOS generated using gRPC. At that point, developers will be able to create applications for vehicle-based companion computers, ground-based GCS, mobile devices, and cloud-based service delivery – using the most appropriate programming language for their implementation.
The library is still in the early stage of development, but already has enough documentation to get started and active support channels.
Check it out – we welcome your interest and contribution!
]]>For Dronecode/PX4, the demonstration represents an important step forward in enabling the drone ecosystem, and in the integration through DroneCore with drone app and service providers like AirMap.

The U-space demo team and guests posing for a picture after the successful demo (image courtesy of skyguide)
The live U-space demo included:
- Drone e-registration and e-identification
- Integration with skyguide’s air traffic control radar system
- Flight planning and dynamic situational awareness
- Access to geo-information and geofencing before and during flight
- Digital airspace approval and flight management
- Flight planning and real-time drone telemetry data

How U-space works (image courtesy of skyguide)
For the demo, the PX4 team chose the Intel® Aero Ready-to-fly drone because it is already fully integrated with the Dronecode PX4 flight stack and easy to use! The team collaborated with Intel’s drone business unit and Open-source Technology Center (OTC) to integrate with the AirMap platform (using DroneCore). We also worked with local and international partners including skyguide, SITAONAIR, senseFly to demonstrate U1 and U2 services during the live missions.
The team showed that this system is ready to be deployed to serve live flights in Europe – an exciting prospect for Europe’s growing community of commercial drone operators.

The Intel® Aero Ready-to-fly drone used by the PX4 team at the demo on September 14th.
(image courtesy of 20min.ch)
Perhaps most importantly, this demonstration showed the power of the DroneCore APIs in allowing software companies to integrate their apps and services on drones flying with the Dronecode flight stack. In this case, DroneCore enabled the integration with AirMap’s air traffic services. The functionality has been demonstrated on the Intel® Aero Ready-to-fly drone and will be available to every user of Dronecode’s PX4 autopilot.
Learn more about new the DronecCore APIs here.
For more information on U-space and its implementation in Europe, check out the U-space Blueprint.
For more on the U-space demonstration, watch the demo in action here.
]]>Dear Dronecode Members,
Reminder: Dronecode will be presenting at InterDrone on September 7th.
Read below to find all the news!
Lorenz Meier honored to be included in MIT Technology Review’s 2017 Innovators Under 35 List.
Lorenz Meier, the creator of the Dronecode flight stack (PX4), has been recognized by Technology Review as a 2017 Inventor for his work. Past honorees include Larry Page and Sergey Brin, the co-founders of Google; Mark Zuckerberg, the co-founder of Facebook; and Jonathan Ive, the chief designer of Apple.
This is fantastic recognition for Lorenz, who was quick to point out that PX4 is a huge community effort:
“It is a fantastic experience going from the small Pixhawk student team in 2008 to a global open source community serving thousands of developers. None of this would have been possible without the support of ETH, Dronecode and our many contributors and partnering open source projects. It is great to see the work of the development community now being available in professional and consumer products.” … Lorenz Meier
Major product releases powered by the Dronecode Platform
The Dronecode portfolio is growing fast!.
Yuneec releases the Typhoon H520

Powered by the Dronecode Platform, the H520 Incorporates Multiple Interchangeable Payload Options, DataPilot Mission Planning Software and All-New YES! Commercial Service Program.
Mission Planning Software and All-New YES! Commercial Service Program.
Yuneec’s first product designed for commercial use builds on PX4 v1.6.2 and extends Dronecode’s new DroneCore MAVLink Library to create their own SDK with plugins to integrate external hardware (Camera payloads)
All camera payloads are interchangeable and hot-swap capable, offering time-saving convenience for the commercial operator.
- E90, The E90 is a wide-angle, high-resolution camera for applications that require high-quality photos and video as it utilizes a 20-megapixel one-inch Sony Exmor sensor and the latest Ambarella H2 high-speed image-processing chip
- E50, The E50 camera is a medium focal length, high-resolution camera perfectly suited for use in inspections and for broadcast
- CGOET, The CGOET dual thermal-RGB camera is specifically designed for public safety, search and rescue, and solar inspection applications and is the industry’s first combined thermal and residual light camera with the integrated gimbal.
The H520 is available in a variety of configurations with prices ranging from $1,999 to $4,699. For more information on the H520, E90/E50/CGOET camera payloads, DataPilotTM, SDK platform and YES! Commercial service program, visit commercial.yuneec.com.
Sensirion SDP3x Airspeed Sensors improve Dronecode Platform VTOL

Sensirion has integrated a revolutionary new airspeed sensor into PX4. The highly sensitive SDP3x-series does not require recalibration on launch, allowing you to get your VTOL aircraft into the air faster and transition to fixed-wing mode more safely
Vertical Technologies DeltaQuad VTOL running PX4
An innovative series of autonomous VTOL UAVs for the professional market, which uses PX4 for the autopilot and created by members of the PX4 dev team!


We’re going to Interdrone
Dronecode’s Lorenz Meier and Ramon Roche will be speaking at Interdrone about how to create end-to-end solutions using the Dronecode Platform. They’ll be covering the platform, PX4, and the tools that surround our ecosystem.
The talk is on Thursday, September 7th at 1:30pm, and is open to everyone attending the conference.
Note that the speakers will be available to meet our community and discuss how we can best work together.
About InterDrone.
After an impressive show last year (3,518 delegates from 54 nations and rave reviews) InterDrone returns to Las Vegas Sept. 6-8 in a premier location. It will feature 125+ sessions for engineers, software developers, executives, investors, regulators and commercial drone “buyers and flyers” in more than a dozen vertical market segments. Three distinct tracks define the event in 2017: Drone TechCon for builders; Drone Enterprise for those using drones for commercial activities; and Drone Cinema where image quality and range are paramount. 4,000+ attendees from 6 continents and 180+ exhibitors.
Still not sure if attending?, Here’s a $100.00 discount on a 3-day pass.
Receive a $100 discount off the prevailing rate of the 3-day pass by inserting the code FLYIT when prompted at www.interdrone.com
Documentation updates.
Since our last newsletter, we’ve made many updates and additions to the documentation. A few highlights include:
- Added detailed Mission mode docs in the PX4 User Guide (and improved Flight Modes concept doc in developer guide).
- Migrated vehicle build logs into PX4 User Guide (Traxxis Stampede UGV and TPS Caipiroshka VTOL)
- Started migrating flight controller hardware docs into user guide.
- Updated RTK GPS information.
Working group updates.
Most of the Working Groups are active and lots of progress has been made. Here is a brief overview.
Lots of active discussion and continued progress toward getting camera capabilities and setting camera parameters, and video stream discovery
- Camera API discussion is at http://discuss.px4.io/t/mavlink-camera-api-discussion/3278
- Video Stream discovery over MAVLink: https://github.com/mavlink/qgroundcontrol/pull/5271
The SDK WG has made significant progress this month:
- The Dronecode core MAVLink library has been named “DroneCore”. The Github repository is here: https://github.com/dronecore/DroneCore
- The team evaluated a number of tools for creating language bindings:
- SWIG did not provide all the bindings required and had some complexities that would make it hard to implement and maintain.
- Pybind11 yielded better results but only generates python bindings.
- The team decided we would focus on adding a gRPC server component that would allow for client libraries to be generated on every possible platform.
- Support for RTPS was merged into PX4 and is supported on POSIX targets.
- NuttX targets use a UART bridge that multiplexes the MAVLink messages and the RTPS topics and this is working with Intel Aero and the SITL build.
Documentation can be found here: https://dev.px4.io/en/middleware/micrortps.html - The main Messaging WG contributors at eProsima were away on vacation so not a lot of other progress has been made.
- Dronecode has been asked to join the FAA’s Greetings UAS Safety Team and has accepted
- Progress continues on an Intel BVLOS application using Dronecode with Airmap extensions
Progress in Code Quality is being made on several fronts:
- Rewrite of the Commander module
- Code coverage using gcov
- Architectural redesign for modularity, decoupling, and extensibility
- The group has suspended activities temporarily while the main participants are occupied with other commitments.
Contributions.
This month the project’s pulse shows we’ve merged 84 73 PRs (+11) and closed 73 issues (+4). 14644 lines were added and 6273 were deleted.

Flight Testing.
These are the flight testing stats since the last newsletter (July 28 – August 28):
- 386 commits tested.
- 512 total flights.
- Pixhawk mini (DJI F450): 72
- Pixhawk 3 Pro (DJI F450): 109
- Pixracer (DJI F450): 98
- Pixhawk 1 (DJI F450): 155
- Pixhawk mini (Phantom FW): 19
- Dropix (VTOL): 4
- Pixhawk 3 Pro (VTOL): 10
- Snapdragon PWM-ESC (QAV 250): 4
- Intel Aero Ready To Fly Drone: 8
- Yuneec H520: 33
- 24 daily flights (average).
- 0 major issues found.
- 1 releases tested:
- https://github.com/PX4/Firmware/releases/tag/v1.6.5
- 7 PR’s tested:
- 15 vehicles total.
]]>
The TSC Working Groups provide brief summary updates here. More detailed monthly status updates may be found in the Dronecode blog here.
UX WG
The group have suspended activities temporarily while the main participants are occupied with other commitments.
SDK WG
The SDK WG has made significant progress this month:
- The Dronecode core MAVLink library has been named “DroneCore”. The Github repository is here: https://github.com/dronecore/DroneCore
- The team evaluated a number of tools for creating language bindings:
- SWIG did not provide all the bindings required and had some complexities that would make it hard to implement and maintain.
- gRPC is still be evaluated. A positive initial review (it supports the required language bindings and has many other useful features) means that it is highly likely to be selected.
Code Quality WG
Progress in Code Quality is being made on several fronts:
- Rewrite of the Commander module
- Code coverage using gcov
- Architectural redesign for modularity, decoupling, and extensibility.
Camera API WG
Lots of active discussion and continued progress toward getting camera capabilities and setting camera parameters, and video stream discovery.
- Discussion at:
- Video Stream discovery over MAVLink:
Messaging WG
- Support for RTPS was merged into PX4 and is supported on POSIX targets.
- NuttX targets use a UART bridge that multiplexes the MAVLink messages and the RTPS topics and this is working with Intel Aero and the SITL build.
- Documentation can be found here: https://dev.px4.io/en/middleware/micrortps.html
- The main Messaging WG contributors at eProsima were away for vacation so not a lot of other progress has been made.
Safety WG
- Dronecode has been asked to join the FAA’s Greetings UAS Safety Team and has accepted.
- Progress continues on an Intel BVLOS application using Dronecode with Airmap extensions.

Unlike other airspeed sensors, the SPD3x series do not require calibration before use and offer high accuracy and sensitivity even at low airspeeds. When used in VTOL aircraft, users can instantly launch the drone (without need for a calibration process) and transition between hovering and forward flight much more safely.
For more information see:
- Sensirion Airspeed Sensors Revolutionize Workflow with PX4 VTOL Drones (sensirion.com) – release announcement.
- Differential Pressure Sensors SDP3x for Drones (sensirion.com) – technical overview.
- SDP3x Airspeed Sensor Kit (SDP33) (Drotek.com) Buy here!
SAN FRANCISCO, Aug. 16, 2017 /PRNewswire-USNewswire/ — Today, MIT Technology Review reveals its annual list of Innovators Under 35. For over a decade, the global media company has recognized a list of exceptionally talented technologists whose work has great potential to transform the world. The Dronecode project is honored to announce that Lorenz Meier, the creator of the PX4 project, has been recognized by Technology Review as a 2017 Inventor for his work.
Meier created the PX4 flight stack platform for drones and released it as open source in 2011. The PX4 autopilot provides guidance, navigation and control algorithms for autonomous fixed wing, multirotor and VTOL airframes, along with estimators for attitude and position. PX4 is a project within Dronecode and is also supported by the Computer Vision and Geometry Lab of ETH Zurich (Swiss Federal Institute of Technology) and by numerous industry partners. Additional information about PX4 and Dronecode is available at http://px4.io/ and https://www.dronecode.org/.
“Over the years, we’ve had success in recognizing young innovators whose work will change how the world thinks about what technology can do,” says editor David Rotman. “Past honorees include Larry Page and Sergey Brin, the cofounders of Google; Mark Zuckerberg, the cofounder of Facebook; and Jonathan Ive, the chief designer of Apple. We’re proud of our selections and the variety of achievements they celebrate, and we’re proud to add Lorenz Meier to this prestigious list.”
“It is a fantastic experience going from the small Pixhawk student team in 2008 to a global open source community serving thousands of developers,” says Lorenz Meier. “None of this would have been possible without the support of ETH, Dronecode and our many contributors and partnering open source projects. It is great to see the work of the development community now being available in professional and consumer products. In the next years my personal focus will be to push the safety, security and reliability of drones onto an industrial grade level. This will make the ecosystem future proof and foster broad adoption in commercial and enterprise use cases.”
This year’s honorees will be featured online at www.technologyreview.com starting today, and in the September/October print magazine, which hits newsstands worldwide on August 29. They will appear in person at the upcoming EmTech MIT conference November 6-9 in Cambridge, Massachusetts (www.EmTechMIT.com).
About MIT Technology Review
Founded at the Massachusetts Institute of Technology in 1899, MIT Technology Review is a digitally oriented independent media company whose analysis, features, reviews, interviews, and live events explain the commercial, social, and political impact of new technologies. MIT Technology Review readers are curious technology enthusiasts—a global audience of business and thought leaders, innovators and early adopters, entrepreneurs and investors. Every day, we provide an authoritative filter for the flood of information about technology. We are the first to report on a broad range of new technologies, informing our audiences about how important breakthroughs will impact their careers and their lives. Subscribe. Follow us: Twitter, Facebook, LinkedIn, Google+, Instagram.
About Dronecode
The Dronecode project delivers a collaborative and shared open source platform for unmanned aerial vehicles (UAVs). It provides a neutral place where industry and community developers can contribute technology in order to reduce costs and time to market. Member companies include Intel, Qualcomm, 3D Robotics, Yuneec and many more supporters of the platform. Dronecode is hosted by The Linux Foundation. Follow us: Twitter, Blog. Learn more at https://www.dronecode.org.
Dronecode is a trademark of the Dronecode Project, Inc. The Linux Foundation has registered trademarks and uses trademarks. For a list of trademarks of The Linux Foundation, see its trademark usage page: https://www.linuxfoundation.org/trademark-usage. Linux is a registered trademark of Linus Torvalds.
For MIT Technology Review:
David W.M. Sweeney
617-475-8018
[email protected]
For Dronecode:
Ramon Roche
[email protected]
Dear Dronecode Members,
This month saw the release of QGroundControl 3.2, the Dronecode roadmap, and the UX working group survey results. We’re also very excited to announce that Dronecode will be presenting at InterDrone next month. Read below to find all the news!
Platform release: QGroundControl 3.2
This month we released QGroundControl 3.2, which can now be downloaded from the site.
The release delivers many new features and is particularly significant because it is the first stable release that allows users to easily access all the new updates to the Dronecode flight stack.
A few highlights include the addition of survey missions, easier access to guided actions from the toolbar, better support for multiple vehicle control, and enabling third party customization/versions of QGroundControl.
For more information check out the detailed release notes (or see the cumulative release notes for a quick overview).

Dronecode roadmap now available
Since our last newsletter we’ve added high-level sidebar links between all our documentation libraries so, for example, it is much easier to find QGroundControl documentation when you’re in the PX4 User Guide (see the documentation update blog!)
As part of our effort to provide more visibility on the planned evolution of the platform, we’re now publishing a public roadmap. This currently extends to March next year and provides high-level updates on the next few significant releases.
Check it out on the Dronecode site (linked from the “Platform” page): Roadmap & Feature Overview
We’re going to Interdrone!
Dronecode’s Lorenz Meier and Ramon Roche will be speaking at Interdrone about how to create end-to-end solutions using the Dronecode Platform. They’ll be covering the platform, PX4, and the tools that surround our ecosystem.
The talk is on Thursday, September 7th, and is open to everyone attending the conference.
Note that the speakers will be available to meet our community and discuss how we can best work together.
More than 185 UAV Vendors Flying in to Las Vegas
You’re invited to dive deep into the world of commercial drones coming to Las Vegas, September 6-8. InterDrone is the world’s largest dedicated commercial UAV event and we’ve got a super discount for you:
Save an Extra $100 off any Conference Registration with the code: SKYE
Dive into the hottest topics in Agriculture, Construction, Emergency Services, Cinematography, Mining and Aggregates, Inspection, Mapping, and more with the 125+ sessions and panels at the show. Then cruise the exhibit hall and check out the 185+ vendors showcasing the latest hardware and pioneering software and services. Network at the evening reception, marvel at the InterDrone Film Festival, connect at the Women in Drones Luncheon and learn more at After Hours sessions. Put yourself at the center of the commercial drone revolution at InterDrone!
Be a part of the future and register today for a 3-Day All-Access Pass – and take an extra $100 off with the promo code: SKYE

UX Drone Survey results
The Dronecode UX working group survey results have now been published.
Among other things, the results have provided some useful insight into areas of satisfaction and dissatisfaction with our current offering (e.g. documentation), and into the technology areas where respondents see the greatest opportunities for investment. The UX team will be using the results as a springboard for further investigation on areas where we can improve.
Documentation updates
Since our last newsletter, we’ve made many updates and additions to the documentation. A few highlights include:
-
Updated toolchain instructions:
-
Simulator introduction. This better helps users understand what Simulators are available, and where each might be preferred. It also explains the Simulation architecture.
-
New QGroundControl Joystick and virtual thumbstick docs
Working group updates
-
Presented the results of our user survey. These will help us to understand what Dronecode members and the community are looking for from the project.
-
Presented a proposal for Dronecode and projects branding suggesting many interesting ideas and logo improvements.
-
Still looking at better using dronecode website analytics and integrating with the PX4 site analytics.
-
Decided to use XML vs JSON. Did not want to deal with code in JSON for constraint management and security issues.
-
Prototyping continues, image capture supported so far. Video support is next.
-
Managing HW constraints is still TBD. Seems like a separate schema to overlay collections of cameras that share an ISP would be needed.
-
Discussed requirements for testing the new features. Extending the existing camera simulator seems like the best approach.
-
Discussion at:
-
Video Stream discovery over MAVLink:
-
The SDK WG has selected DroneLink (working name) as the basis for the new SDK.
-
The code should be made available very shortly.
-
-
Cloud and Mobile APIs are the current focus.
-
Supported language bindings are being discussed.
-
-
A PR for integration of Fast-RTPS and Fast-CDR support is now pending.
-
The CI images need to be updated with fastrtpsgen support.
-
A Visual Inertial Odometry (VIO) example using Fast-RTPS is being developed.
-
No update.
-
Held first Code Quality WG meeting and decided to meet bi-weekly.
-
Outlined objectives of the WG for new participants.
-
Discussed
-
Testing needed.
-
Design patterns for drivers.
-
How to stage code that hasn’t yet received broad in-flight testing.
-
Getting/producing unit tests for submitted code.
-
-
CQWG tag in Github is now available.
-
A GitHub project will be set up for Code Quality WG for issue management
-
Will be working on setting up docker container for last 2 versions of ROS for testing missions.
-
Met with FAA representative to get input on requirements for compliance and discussed how to possibly make it easier for Dronecode adopters to certify their solutions.
Contributions.
This month two new point releases were made to the new PX4 v1.6 release (1.64 and 1.65). The project pulse shows we’ve merged 73 PRs (+24) and closed 69 issues (+12). 10965 lines were added and 6137 were deleted.

Flight Testing.
These are the flight testing stats since the last newsletter (July 14 – July 31):
-
357 commits tested.
-
344 total flights.
-
Pixhawk mini (DJI F450): 36
-
Pixhawk 3 Pro (DJI F450): 47
-
Pixracer (DJI F450): 61
-
Pixhawk 1 (DJI F450): 152
-
Pixhawk mini (Phantom FW): 13
-
Dropix (VTOL): 6
-
Snapdragon UART-ESC (200qx): 20
-
Snapdragon PWM-ESC (QAV 250): 9
-
-
20 daily flights (average).
-
0 major issues found.
-
2 releases tested:
-
6 PR’s tested:
-
13 vehicles total.
The TSC Working Groups provide brief summary updates here. More detailed monthly status updates may be found in the Dronecode blog here.
UX WG
- Presented the results of our platform user survey. These will help us understand what Dronecode members and the community are looking for from the project.
- Presented a proposal for Dronecode and projects branding suggesting many interesting ideas and logo improvements.
- Still looking at better using dronecode website analytics and integrating with the PX4 site analytics.
SDK WG
- The SDK WG has selected DroneLink (working name) as the basis for the new SDK.
- The code should be made available very shortly.
- Cloud and Mobile APIs are the current focus.
- Supported language bindings are being discussed.
Code Quality WG
- Held first Code Quality WG meeting and decided to meet bi-weekly.
- Outlined objectives of the WG for new participants.
- Discussed
- Testing needed.
- Design patterns for drivers.
- How to stage code that hasn’t yet received broad in-flight testing.
- Getting/producing unit tests for submitted code.
- CQWG tag in Github is now available.
- A github project will be set up for Code Quality WG for issue management
- Will be working on setting up docker container for last 2 versions of ROS for testing missions.
- Met with FAA representative to get input on requirements for compliance and discussed how to possibly make it easier for Dronecode adopters to certify their solutions.
Camera API WG
- Decided to use XML vs JSON. Did not want to deal with code in JSON for constraint management and security issues.
- Prototyping continues, image capture supported so far. Video support is next.
- Managing HW constraints is still TBD. Seems like a separate schema to overlay collections of cameras that share an ISP would be needed.
- Discussed requirements for testing the new features. Extending the existing camera simulator seems like the best approach.
- Discussion at:
- Video Stream discovery over MAVLink:
Messaging WG
- A PR for integration of Fast-RTPS and Fast-CDR support is now pending.
- The CI images need to be updated with fastrtpsgen support.
- A Visual Inertial Odometry (VIO) example using Fast-RTPS is being developed.
Safety WG
- No update.
I’m very excited to announce our talk at InterDrone this year, Lorenz Meier and I will be speaking about the Dronecode platform, PX4, and the tools that surround our ecosystem, our talk is open to everyone attending the conference.
Join us Thursday, September 13th and learn how to leverage the Dronecode platform to create end-to-end solutions, cloud, mobile and onboard (companion computers), we will guide you through the steps and layers and provide insight into the platform.
Dronecode: The complete “end-to-end” open source drone platform.
As the capabilities of drones increase so does software complexity. Dronecode reduces this complexity by providing a complete and fully-integrated/tested software stack that covers drone development from hardware all the way to the cloud. The stack extends the core autopilot software for autonomous flying by adding additional layers, including middleware and higher level APIs to communicate with onboard Linux computers, mobile apps, and cloud servers.
This session introduces the software stack and runs through several examples. These examples cover basic flight planning/surveys, mobile app development for drones, and how to use the Dronecode platform to share UAV information with a cloud server.

About InterDrone.
After an impressive show last year (3,518 delegates from 54 nations and rave reviews) InterDrone returns to Las Vegas Sept. 6-8 in a premier location. It will feature 125+ sessions for engineers, software developers, executives, investors, regulators and commercial drone “buyers and flyers” in more than a dozen vertical market segments. Three distinct tracks define the event in 2017: Drone TechCon for builders; Drone Enterprise for those using drones for commercial activities; and Drone Cinema where image quality and range are paramount. 4,000+ attendees from 6 continents and 180+ exhibitors.
Still not sure if attending?, Here’s a $100.00 discount on a 3-day pass.
Receive a $100 discount off the prevailing rate of the 3-day pass by inserting the code FLYIT when prompted at www.interdrone.com
Lorenz Meier
Lorenz Meier founded the Pixhawk project in 2008 at ETH Zurich (teaser video) and grew the open hardware effort into the industry reference platform it is today.
Lorenz created a whole drone software stack with the open source community by founding critical open source projects, including MAVLink, QGroundControl and eventually PX4, which is the core of Dronecode today.
After completing his Ph.D. 2017 on system architecture and computer vision on drones he is now full-time working on PX4 and fostering adoption of open source software in the drone industry.
He won several awards and fellowships for his academic work on computer vision on drones from ETH, ABB, Qualcomm and Amazon Prime Air.
Ramon Roche
Ramón Roche is the Dronecode Program Manager and Lead Software Architect and is also the founder and maintainer of DroneKit.
Before joining Dronecode, Ramón lead the 3DR Systems and Tools team and was a key contributor to 3DR Iris, 3DR Solo, and 3DR SiteScan products. Over a career of more than ten years, he has performed many other interesting roles in the industry, including software engineer, systems architect, tools developer, DevOps, team lead, and team manager.
Ramón is tasked with architecting the Dronecode platform, with an initial focus on developing the best possible Dronecode Platform SDK.
]]>an update from Dronecode
July Newsletter
Dear Dronecode Members,Over the last month we’ve continued to update PX4 v1.6, prepare for the release of QGroundControl 3.2, and update our documentation. The Working Groups have also made good progress in a number of areas.
Read on to find out more!
Platform Releases.
QGroundControl is preparing to release the new version (v3.2) in the coming month! This will include support for using many of the new features in PX4 1.6, which you can presently only use in daily builds.
PX4 v1.6 was released last month. We’ve continued to fix bugs and make spot releases (we’re now up to PX4 1.6.3)

Documentation updates.
Since our last newsletter we’ve added high level sidebar links between all our documentation libraries so, for example, it is much easier to find QGroundControl documentation when you’re in the PX4 User Guide (see the documentation update blog!)
We’ve also made some other significant additions, including:
- PX4 Developer Guide translated into Korean
- Improved toolchain instructions for Mac
- Updated configuration instructions in the QGroundControl User Guide and PX4 User Guide
Working group updates.
UX Working Group
Last month the UX WG started classifying members according to clusters (in order to guide the evolution of our platform roadmap):
- Our initial classification document is here. This is a work in progress, but we would love your feedback (please comment within the document).
- The UX WG created a survey to help understand what Dronecode members and the community are looking for from the project. The survey closed Friday, June 30. Results are being analyzed and will be presented next UXWG meeting in the end of July.
- The WG is also looking at adding Google Analytics for the website and integrating with the PX4 analytics
- We also intend to present a proposal for DC and projects branding.
- Lots of active discussion and progress toward getting camera capabilities and setting camera parameters, and video stream discovery
- Camera API discussion is at http://discuss.px4.io/t/mavlink-camera-api-discussion/3278
- Video Stream discovery over MAVLink: https://github.com/mavlink/qgroundcontrol/pull/5271
- The SDK WG is looking at a Cloud SDK and an on device SDK for building applications that run on the target device or on a mobile device.
- The WG wiki is now updated at https://wiki.dronecode.org/workgroup/dronecodesdk/start, and includes the first step of a comparative evaluation of our requirements and options.
- Collaboration between eProsima and Dronecode member companies, and PX4 community is working well
- The UART bridge and UDP bridge are working so PX4 ORB topics can now be shared with external processes:
- If PX4 is running on Linux, then the UDP bridge can be used to advertise topics via RTPS
- If PX4 is running on a separate flight controller, the companion computer can get ORB topics over USB that are advertised via RTPS
- 1st release of code scheduled for July 13, 2017
- Code is at: https://github.com/eProsima/Fast-RTPS
- Dronecode has been asked to join the FAA’s Greetings UAS Safety Team and has accepted
- Progress continues on an Intel BVLOS application using Dronecode with Airmap extensions
- Lots of progress on improving the quality of the code via tools and scanning
- New investigations into ways to improve code and reduce unit mismatch errors such as https://github.com/nholthaus/units
- Current goals of the Code Quality WG are:
- Get improved code coverage in real missions
- Add ROS tests
- Add comprehensive tests that can be run for each PR but that are not merge gating
- HIL
- Mission tests should also work in HIL (may need restructuring)
- Improve awareness of the testing already being done
- Add summary page to tests being uploaded
- Measure test coverage of the code base
- Consider code restructuring to provide more clarity about what code is in a particular build and the level of coverage of that code
Contributions.
This month two new point release were made to the new PX4 v1.6 release. The project pulse shows we’ve merged 49 PRs (+4) and closed 57 issues (-170). More than 5110 lines were added and 2431 deleted.

Flight Testing.
Flight Testing Stats (Jun 07 – Jul 04)
- 140 commits tested.
- 329 total flights.
- Pixhawk mini (DJI F450): 100
- Pixhawk 3 Pro (DJI F450): 139
- Pixracer (DJI F450): 44
- Pixhawk 1 (DJI F450): 24
- Pixhawk mini (Phantom FW): 5
- Dropix (VTOL): 5
- Snapdragon UART-ESC (200qx): 9
- Snapdragon PWM-ESC (QAV 250): 3
- 18 daily flights (average).
- 1 major issue found.
- 2 releases tested:
- 4 PR’s tested:
- 13 vehicles total.
We built a QAV250 with Snapdragon board and PWM based ESC’s
Dronecode Platform in the Real World.
The following posts from the PX4 blog show new Dronecode Platform builds, features and uses.
- Aerovinci Scalable & Flexible DroneDock System – Aerovinci have developed a scalable drone system that includes a fully self-sustaining drone docking station (“DroneDock”), a PX4-powered VTOL vehicle (“Jack”), and seamless integration with major data collection systems.
- DJI Flamewheel 450 with Distance Sensor and RTK GPS – New build log and demonstration of distance sensor and high accuracy positioning via RTK GPS.
- Falcon Vertigo Hybrid VTOL Build Log – A detailed build log from the test team, using the Dropix flight controller board.
That’s it for this month’s update. Next month we’re looking forward to more information about the Dronecode platform roadmap.
]]>This is a significant release. A high level view of the changes is provided below (more detailed release note can be found here).
-
Settings
- File Save path – Specify a save path for all files used by QGC.
- Telemetry log auto-save – Telemetry logs are now automatically saved without prompting.
- AutoLoad Plans – Used to automatically load a Plan onto a vehicle when it first connects.
- RTK GPS – Specify the Survey in accuracy and Minimum observation duration.
-
Setup
- ArduPilot only
- Pre-Flight Barometer and Airspeed calibration – Now supported
- Copy RC Trims – Now supported
- ArduPilot only
-
Plan View
- Plan files – Missions are now saved as .plan files which include the mission, geo-fence and rally points.
- Plan Toolbar – New toolbar which shows you mission statistics and Upload button.
- Mission Start – Allows you to specify values such as flight speed and camera settings to start the mission with.
- New Waypoint features – Adjust heading and flight speed for each waypoint as well as camera settings.
- Visual Gimbal direction – Gimbal direction is shown on waypoint indicators.
- Pattern tool – Allows you to add complex patterns to a mission.
- Fixed Wing Landing (new)
- Survey (many new features)
- Fixed Wing Landing Pattern – Adds a landing pattern for fixed wings to your mission.
- Survey – New features
- Take Images in Turnarounds – Specify whether to take images through entire survey or just within each transect segment.
- Hover and Capture – Stop vehicle at each image location and take photo.
- Refly at 90 degree offset – Add additional pattern at 90 degree offset to original so get better image coverage.
- Entry location – Specify entry point for survey.
- Polygon editing – Simple on screen mechanism to drag, resize, add/remove points. Much better touch support.
-
Fly View
- Arm/Disarm – Available from toolbar.
- Guided Actions – New action toolbar on the left. Supports:
- Takeoff
- Land
- RTL
- Pause
- Start Mission
- Resume Mission – after battery change
- Change Altitude
- Land Abort
- Set Waypoint
- Goto Location
- Remove mission after vehicle lands – Prompt to remove mission from vehicle after landing.
- Flight Time – Flight time is shown in instrument panel.
- Multi-Vehicle View – Better control of multiple vehicles.
-
Analyze View – New
- Log Download – Moved to Analyze view from menu
- Mavlink Console – NSH shell access
-
Support for third-party customized QGroundControl
- Standard QGC supports multiple firmware types and multiple vehicle types. There is now support in QGC which allows a third-party to create their own custom version of QGC which is targeted specifically to their custom vehicle. They can then release their own version of QGC with their vehicle.
The Working Groups are all active and lots of progress is being made. More people have started participating and discussions are more centralized than they have been in the past. Uberconference is working well for the meetings and Github and http://discuss.px4.io are the centers of most community collaboration.
The TSC Working Groups provide brief summary updates here. More detailed monthly status updates may be found in the Dronecode blog here.
UX WG
- The UX working group created a survey to help understand what Dronecode members and the community are looking for from the project. The survey closed Friday, June 30.
- The WG is also looking at adding Google Analytics for the website and integrating with the PX4 analytics
- The UX WG wiki is https://wiki.dronecode.org/
workgroup/ux/start
SDK WG
- The SDK WG is looking at a Cloud SDK and an on device SDK for building applications that run on the target device or on a mobile device.
- The WG wiki is now updated at https://wiki.dronecode.org/
workgroup/dronecodesdk/start
Code Quality WG
- Lots of progress on improving the quality of the code via tools and scanning
- New investigations into ways to improve code and reduce unit mismatch errors such as https://github.com/
nholthaus/units - Current goals of the Code Quality WG are:
- Get improved code coverage in real missions
- Add ROS tests
- Add comprehensive tests that can be run for each PR but that are not merge gating
- HIL
- Mission tests should also work in HIL (may need restructuring)
- Improve awareness of the testing already being done
- Add summary page to tests being uploaded
- Measure test coverage of the code base
- Consider code restructuring to provide more clarity about what code is in a particular build and the level of coverage of that code
- WG page is at https://wiki.dronecode.org/
workgroup/codequality/start
Camera API WG
- Lots of active discussion and progress toward getting camera capabilities and setting camera parameters, and video stream discovery
- Camera API discussion is at http://discuss.px4.io/t/
mavlink-camera-api-discussion/ 3278 - Video Stream discovery over MAVLink: https://github.com/
mavlink/qgroundcontrol/pull/ 5271 - The Camera WG wiki page is out of date
Messaging WG
- Collaboration between eProsima and Dronecode member companies, and PX4 community is working well
- The UART bridge and UDP bridge are working so PX4 ORB topics can now be shared with external processes
- If PX4 is running on Linux, then the UDP bridge can be used to advertise topics via RTPS
- If PX4 is running on a separate flight controller, the companion computer can get ORB topics over USB that are advertised via RTPS
- 1st release of code scheduled for July 13, 2017
- Code is at: https://github.com/
eProsima/Firmware - The Messaging WG wiki page is out of date
Safety WG
- Dronecode has been asked to join the FAA’s Greetings UAS Safety Team and has accepted
- Progress continues on an Intel BVLOS application using Dronecode with Airmap extensions
There has been a lot of documentation work this month, including site updates and improved inter-linking between our sites and documentation libraries.
The updated PX4 site is shown below.

Accomplishments
Some achievements this month were:
- The PX4 Pro Website was updated in line with recent Dronecode site update. The new theme is a lot more attractive, and navigation is more straightforward. All the main Dronecode websites (Dronecode, PX4 Pro and QGroundControl) are now better connected and unified through a shared theme, fonts, and footer. The bottom of the updated PX4 site (with both PX4 and Dronecode footer) is shown below.

- All the Dronecode Platform documentation libraries now have cross links to the other libraries. This makes it much easier to find related documentation.

- The QGroundControl User Guide section on setting up vehicles has been updated to the current release.
Plan for next month
Over the next month we hope to:
- Embed the MAVLink common message documentation into the MAVLink Developer Library.
- Update the PX4 User Guide with new airframe builds
- Update the PX4 User Guide sections for basic configuration
- Update the PX4 Developer Guide Simulation sections.
Want to help?
If you want to be involved in documentation work, contact us on Dronecode discuss or through our issues tracker.
|
|
|
|
|
|
|
|
|
|
|
|
|


 PX4 Release 1.6
PX4 Release 1.6




]]>
 Just a few of the new features and enhancements in this release are:
Just a few of the new features and enhancements in this release are:
- New flight modes for Fixed Wing – Acro and Rattitude
- New uLog logging format that directly logs uORB topics for more accurate time stamping. This is already supported for review and analysis here: http://review.px4.io
- Improvements to camera triggering to make it easier to use and and provide better real-time feedback
- Support for survey flights in multicopter and fixed wing with an intuitive UI
- Temperature calibration and compensation
- Support for MAVLink and PWM controlled gimbals
- Support for generic helicopters and Blade 130 mixer
- Improved robustness in EKF2 and hardening against marginal GPS reception.
- Significant improvements to user experience for both the Qualcomm Snapdragon Flight and the Intel® Aero Ready to Fly Drone
- Support for STM32F7 and NuttX Update to a recent release
- New hardware support including the Crazyflie v2, FMUv4 PRO and FMUv5 (Special thanks to Drotek and Team Blacksheep for donating the FMUv4 and FMUv5 hardware!)
This is also the most tested and hardened PX4 release to date. The dedicated test team that have done hundreds of hours of testing, on all the major vehicle platforms and using all the main reference flight controller hardware.
A breakdown of the testing since the last stable release (1.5.5) is listed below:
- 2257 commits tested.
- 847 total flights on 12 different vehicles and 6 different flight controllers:
- Pixhawk mini (DJI F450): 554
- Pixhawk mini (Generic Quad): 11
- Pixhawk 1 (DJI F450): 15
- Pixhawk mini (Hexa): 11
- Pixhawk mini (Phantom FW): 17
- Pixhawk mini (QAV 250): 28
- Pixracer (DJI F450): 34
- Pixracer (Flipsport): 140
- Pixhawk 3 Pro (DJI F450): 27
- Dropix (VTOL): 1
- Intel® Aero Ready to Fly Drone: 6
- Snapdragon (200qx): 3
- 6 releases tested: 1.6.
0-rc1, 1.6.0-rc2, 1.6.0-rc3, 1.6.0-rc4, 1.6, 1.6.1 - 22 PR’s tested: 6362, 6438, 6440, 6505, 6633, 6756, 6777, 6862, 6863, 6920, 7003, 7009, 7017, 7036, 7095, 7260, 7265, 7268, 7274, 7281, 7287, 7346
The firmware is already available in QGroundControl (for access to the best UI you may choose to use the “daily build” here). We owe a huge debt of gratitude to the whole PX4 Development Team for this outstanding work.
]]>The TSC is responsible for managing the technical aspects of the Dronecode organization. The TSC oversees the Working Groups (WG) and provides an interface to the board to align Dronecode strategic and technical direction.
Status Updates
- The PX4 Pro Website was updated in line with recent Dronecode site update. All our documentation libraries now have cross links to other libraries. For more information see the blog update.
- The PX4 Pro v1.6 was released – see blog update here. A new release of QGC should also be out soon as well.
Working Group Updates
The TSC Working Groups provide brief summary updates here. More detailed monthly status updates may be found in the Dronecode blog here.
SDK Working Group
The Dronecode SDK WG is tasked to develop a Drone Application Development SDK. This SDK should allow developers to create drone “applications” that can run on mobile devices (tablets, phones) and on-board companion computers, and that can also seamlessly integrate drones with cloud-based services. The evaluation will consider Python, C++ and Android Developer APIs, including options like ROS, DroneKit etc., and also integration with Simulation environments.
We are currently seeking members for the working group. If you have experience with developer APIs for drones we’d love to hear from you. You can join the conference call for more information.
Achievements this month:
- Performed comparative analysis of a number of current available SDKs.
- Based on the analysis, the open source AirLib API was chosen for further experimentation/exploration (this is part of Microsoft’s AirSim simulator)
- Identified additional AirLib features required for DroneCode SDK.
Plan for next month:
- Start to hold meetings and build membership.
- Select developer API.
- If AirLib is selected:
- Make base version of AirLib available for all users as part of Dronecode (process/approval permitting).
- Implement a Mission Manager (adds mission handling to the AirLib API).
- Start developing SDK documentation
Camera API Working Group
The Camera API WG is focused on platform independent developer APIs for cameras and remote control of camera and gimbal.
The current status of work is:
- Updated proposal for MAVLink messages discussion ongoing in http://discuss.px4.io/t/mavlink-camera-api-discussion/3278/20
- Camera Streaming Daemon received support for those messages and an initial WIP patch integrating this into QGC has been sent upstream for discussion: https://github.com/mavlink/qgroundcontrol/pull/5271
- Major point pending a decision is on how to share information about camera capabilities and features supported.
- Next steps include trying to implement one proposal among the initial ones of how to share camera capabilities information and submitting support for that on MAVLink, Camera Streaming Daemon and QGroundControl for wider testing.
Messaging WG
The Messaging Working Group has evaluated middleware solutions for communication between GCS, drone, cloud, ROS, and between processes running on the vehicle. Following selection of the eProsima FastRTPS solution, the group is progressing with integration of FastRTPS into the platform.
The following achievements have been made this month.
- Implementation of the full uORB <-> FastRTPS transparent bridge prototype is complete.
- Testing and performance validation have started (ongoing)
- Deployment on Intel Aero targeted in next release
- Porting effort on Snapdragon has started.
Safety WG
The Safety Working Group expect Intel to be the first member to submit a DC-based FAA Application. We’re hoping to get the draft for this application reviewed by the FAA within the next four weeks (official submission may take longer).
Other information:
- Airmap and 3DR are meeting this week to coordinate discussions
- The WG welcomes a new member Zongbo Wang (Aerotenna).
User Experience (UX) WG
This month the UX WG started classifying members according to clusters (in order to guide the evolution of our platform roadmap):
- Our initial classification document is here classification document is here. This is a work in progress, but we would love your feedback (please comment within the document).
- In order to inform the classification we’ve created an online survey. Please complete this and share it with other members of the drone community.
The WG have agreed the following organisational changes:
- Meeting will be held monthly on 26th day, 9am (pacific time).
- Contributions will continue happen offline through Google Drive comments and slack channel.
- Updates will also be posted on the wiki.
Next month we plan to report the results of the survey. We also intend to present a proposal for DC and projects branding.
Code Quality Working Group
The Code Quality WG is focused on ways to provide incremental improvements to Dronecode project code quality and testing. This month we have expanded some of the test plans for the flight test team.
The TSC is responsible for managing the technical aspects of the Dronecode organization. The TSC oversees the Working Groups (WG) and provides an interface to the board to align Dronecode strategic and technical direction.
Status Updates
- Working Group leads are now expected to attend the TSC monthly meetings. Daniel Agar (Code Quality WG), Beatriz Palmeiro (UX WG), and Julian Oes (Camera WG) were additional attendees this month. The TSC meetings continue to be on Uberconference and most of the WG meetings are also now using Uberconference.
- The TSC meeting clarified the Dronecode platform as being: PX4, MAVLINK, and QGC. There are several other SW components that work with the Dronecode platform on various HW platforms including DroneKit, ROS, FastRTPS, AirSim, Gazebo, and RViz to name a few.
- We have a new SDK WG to investigate the definition of an official Dronecode SDK. The SDK WG will be led by Anitha Suresh from Intel.
- Luis Strano is taking over for Ulisses Furquim representing Intel on the TSC.
- The Dronecode website refresh is now live and many thanks to the Hamish Willee (Documentation WG), Beatriz Palmeiro (UX WG), and the participants in both WGs for their collaborative effort in making that happen. The Documentation WG has reached its initial objective and will no longer hold regular meetings.
- Work on the PX4 1.6 release is progressing well and the release should be out soon. A new release of QGC should also be out soon as well.
Working Group Updates
The TSC Working Groups provide brief summary updates here.
SDK Working Group
The SDK WG has been started this month to investigate the definition of an official Dronecode SDK. The SDK WG will be led by Anitha Suresh from Intel.
Code Quality Working Group
The Code Quality WG is focused on ways to provide incremental improvements to Dronecode project code quality and testing. This month we have expanded some of the test plans for the flight test team.
Messaging WG
The Messaging Working Group has evaluated middleware solutions for communication between GCS, drone, cloud, ROS, and between processes running on the vehicle. Following selection of the eProsima FastRTPS solution, the group is progressing with integration of FastRTPS into the platform. For more information see the update blog.
Documentation WG
The Dronecode website refresh is now live. Having reached its initial objectives the group will no longer hold regular meetings. For more information see the update blog.
Safety WG
The Safety Working Group had a meeting with the FAA last week to refine guidance (this was very encouraging). AirMap and 3DR are driving next phase of draft application.
User Experience (UX) WG
The UX WG paused group-specific activities in the previous month to support the Docs WG in release of the Dronecode site refresh.
Status update
The Messaging WG is progressing with its integration of FastRTPS into the platform.
Since the last Messaging WG update:
- Eprosima has been looking into performance issues on the loopback interface.
- Ederson de Souza has been working with others to multiplex the MAVLINK and FastRTPS messages over the UART on Intel Aero and has them working concurrently.
- Mark Charlebois is looking at FastRTPS support on the Linux builds (ARM and x86) and bridging uORB topics.
- Christoph Tobler has been working on adapting the ROS VIO example to use FastRTPS as a proof of concept and sample application.
The actual documentation work will of course continue! If you want to be involved, contact us on Dronecode discuss or through our issues tracker.
Accomplishments
Our achievements this month were:
- Dronecode Site Refreshed and Relaunched
- Translations from the community:
- Chinese translation of the PX4 Developer Guide.
- Korean translation of the QGroundControl User Guide.
- Korean translation of the MAVLink Developer Guide.
Over the lifetime of the project we additionally:
- Agreed proposal for creating a unified DC branding strategy across the sites (a common footer and some common branding elements like fonts etc.)
- Created template and regular process for WG updates
- Moved all docs to infrastructure (Gitbook) with common plugins
- Enabled translation of documentation and have started to engage with the community.
Plan for next month
While the working group is now closed, technical content contributors will continue to iterate the project sites, engage with translation communities, and improve documentation as agreed by the WG.
]]>
Everything you need to know can be found in one of four main sections accessible from the main menu:
- About helps readers understand why Dronecode exists and how membership can help achieve us achieve our common goals. It provides a brief overview of our vision, organisation, and members.
- Platform helps users understand and access the main parts of the system. It introduces the platform sub-projects and provides links to key resources like documentation, project websites, source code and discussion forums.
- Contribute explains the many ways that anyone can work with and contribute to the platform. We’ve tried to think about the sorts of people that want to work with the platform and provide a guided path to the right information you need.
- News aggregates all of our ongoing updates, including blogs, release notes, work group updates, newsletters and other information. At the end of the page you can sign up for our newsletter or for email updates of any other posts.
With this update we think you’ll find it easier to get started working with both the Dronecode project and all of our component projects. If you’d like to provide feedback or suggest further improvements, please add comments on our discussion server here.
Note: The site was developed within the Dronecode Documentation Working Group, which includes members from Qualcomm, Intel, 3DR and PX4. Special thanks go to the Linux Foundation for helping us develop our new infrastructure and to Intel for the excellence of their UX design team.
]]>
|



]]>
NOTE: The Code Quality working group is looking for members! If you have an interest in continuous integration, automation, and software development tooling and would like to participate, please contact Daniel Agar ([email protected]).
Accomplishments
This month we’ve made initial plans to build an automated system testing framework for PX4. This will allow a common set of tests to be automatically deployed and run across all the major DroneCode hardware platforms.
The WG has also started to look into areas of PX4 that need refactoring (this is important for improving maintainability and keeping the platform accessible to new contributors). The commander module in PX4 has been identified and initial discussion has started for a redesign and legacy code transition.
Plan for next month
- Add initial software in the loop autopilot backend with a simple mission for each vehicle type.
- Add an embedded hardware target (likely starting with a Pixhawk).
- Establish testing code coverage baseline.
- Create simple documentation to encourage contributions with corresponding test coverage.
- Schedule a regular WG meeting.
Challenges
There is a lot to test and limited resources (both in terms of developer time and testing hardware).
]]>Accomplishments
The Dronecode TSC held their monthly meeting on April 10th. Much of the meeting focused around the TSC and WG processes, and communication channels.
There are several active WGs. The WGs provide monthly status updates through the Dronecode blog. Here is a brief overview of the various WGs:
- Safety WG
- The Safety WG is taking a systems approach to safety, ensuring that safety is built in at all levels — from the vehicle itself to the airspace, operator, ground and data. We are currently seeking a Dronecode system-based FAA waiver for operations beyond those permitted under the regular Part 107 rules. This application can then be the foundation of a process for certifying Dronecode-based UAVs.
- Camera WG
- Intel announced their discovery and RTPS streaming API on PX4 discuss
- Qualcomm provided links to the platform independent libcamera APIs used in Snapdragon flight for review
- The Camera WGs (there are 2) have not yet established regular meetings
- Messaging WG
- eProsima has demoed using CDR to pass uORB topic info from Pixracer to RPi and make the topic info available via Fast RTPS
- Created Yocto recipe for building FastRTPS
- Built and ran FastRTPS on Snapdragon Flight
- Set goal of supporting PX4 Optical Flow demo using FastRTPS
- Code Quality WG
- The Code Quality WG is focused on ways to provide incremental improvements to Dronecode project code quality and testing
- Members have been discussing the scope and resources available
- The Code Quality WG is focused on ways to provide incremental improvements to Dronecode project code quality and testing
- Documentation WG
- Significant documentation improvements:
- Migrated PX4 User Guide from WordPress to Gitbook: https://docs.px4.io/en/
- Enabled translation for PX4 and QGroundControl User and Developer Guides!
- Added a number of useful Gitbook plugins to make the documentation more useful (including in-page table of contents).
- Added/updated improved parameter reference to Dev Guide and User Guide.
- Progressed Dronecode website refresh and have broadly completed content and design. Hoping to be able to launch new version this calendar month (this is partially dependent on Linux Foundation resources).
- Significant documentation improvements:
- User Experience (UX) WG
- Working with Document WG on improving the UX of the Dronecode website
- Held first open, monthly WG meeting
- Defined and ratified Charter
- Agreed to start work on Dronecode user profile research
Challenges
- TSC and WG members are still busy with their day-jobs and it’s difficult to get focused attention on Dronecode issues
Plan for next month
- Hold monthly TSC meeting and provide monthly update
- Summarize TSC activities for the Dronecode Board Meeting
- Follow up on action times from last TSC meeting
Accomplishments
- Significant documentation improvements:
- Migrated PX4 User Guide from WordPress to Gitbook: https://docs.px4.io/en/
- Enabled translation for PX4 and QGroundControl User and Developer Guides!
- Added a number of useful Gitbook plugins to make the documentation more useful (including in-page table of contents).
- Added/updated improved parameter reference to Dev Guide and User Guide.
- Progressed Dronecode website refresh and have broadly completed content and design. Hoping to be able to launch new version this calendar month (this is partially dependent on Linux Foundation resources).
The team discussed (and is still working on) how to:
- Create a compelling and unified Dronecode platform story across project websites
- Document and updating the Dronecode roadmap and release cycle
- Deliver project messaging, marketing and enable member recruiting.
- Improving user and development guide documentation
- Engage with translation communities
Challenges
WG members are sometimes unable to focus on Dronecode issues due to other commitments.
Getting information about Dronecode roadmap has proved difficult.
Plan for next month
- Launch the refreshed Dronecode website.
- Engage translation teams to get Chinese translation on site.
- Agree common footer/header/look and feel for Dronecode sites and roll out to QGroundControl.
- Continue documentation improvements for PX4 User Guide
Accomplishments
- Draft application (waiver) written
- Candidate systems and use cases identified; companies are reviewing
- Testing data and processes documented and statistics gathered
Challenges
- Interfacing with internal regulatory teams at Dronecode member companies is slow
Plan for next month
- Select candidate platform/operator for application
- Submit to FAA Pathfinder Office for review/feedback
ABOUT THE AUTHOR OF THIS POST
Chris Anderson
I’m the CEO of 3D Robotics and founder of DIY Drones. From 2001 through 2012 I was the Editor in Chief of Wired Magazine. Before Wired I was with The Economist for seven years in London, Hong Kong and New York. I’m the author of the New York Times bestselling books The Long Tail and Free as well as the new Makers: The New Industrial Revolution. Awards include: Editor of the Year by Ad Age (2005). Named to the “Time 100,” the newsmagazine’s list of the 100 most influential people in the world (2007). Loeb Award for Business Book of the Year (2007). Wired named Magazine of the Decade by AdWeek for my tenure (2009). Time Magazine’s Tech 40 — The Most Influential Minds In Technolgy (2013). Foreign Policy Magazine’s Top 100 Global Thinkers (2013). I founded GeekDad, BookTour and a few other companies now lost in the mists of time. My background is in science, starting with studying physics and doing research at Los Alamos and culminating in six years at the two leading scientific journals, Nature and Science. In my misspent youth (more of my twenties than I should admit) I was a bit player in the DC punk scene and amusingly, a band called REM. You can read more about that here. I live in Berkeley, California with my wife and five children.
]]>The TSC is responsible for managing the technical aspects of the Dronecode organization. The TSC oversees the Working Groups (WG) and provides an interface to the board to align Dronecode strategic and technical direction.
Accomplishments
The Dronecode TSC held a face-to-face meeting at Intel Headquarters in Hillsboro, Oregon. Intel provided excellent facilities and hospitality and the opportunity for Dronecode members and participants to share thoughts, share work they have done, and help to set an aligned vision for the Dronecode TSC and WG activities. People were also able to join remotely, and it worked very well. A big thanks again to Intel for providing the great venue for the meeting.
There are several active WGs. The WGs provide monthly status updates through the Dronecode blog. Here is a brief overview of the various WGs:
Safety WG
One of the key elements of a full UAV software stack is ensuring that safety is built in at all levels — from the vehicle itself to the airspace, operator, ground and data. The Dronecode stack already has many of these elements in place on the aircraft side (e.g. fail-safes). Individual platform adopters, including drone manufacturers and service providers, have put in place other elements, such as airspace checking and communications link security. The Safety WG is taking a systems approach to safety, bringing completeness and coordination to the various layers and contributors to the stack via the Dronecode Working Group process. This approach is actively being encouraged by the FAA.
Camera WG
The Camera WG is focused on platform independent developer APIs for cameras and remote control of camera and gimbal. APIs under investigation include:
- Remote Camera and Gimbal Control APIs
- Video Streaming APIs
- C/C++ developer camera APIs (FPV, Snapshot, Recording, Optic Flow, and Stereo)
Messaging WG
Middleware solution for communication between GCS, drone, cloud, and between onboard processes. Needs to scale to optimally support onboard communication, and in-process communication. On-board heterogeneous compute to be handled by a communication bridge. Evaluate ROS compatibility.
Code Quality WG
The Code Quality WG is focused on ways to provide incremental improvements to Dronecode project code quality and testing.
There have been some recent activities to improve the code with Coverity and clang-tidy.
Documentation WG
The Documentation WG is looking at ways to overhaul the Dronecode and project sites and improve developer and user documentation.
Specifically, the group will be investigating how best to:
- Create a compelling and unified Dronecode platform story across project websites
- Document and updating the Dronecode roadmap and release cycle
- Provide regular news and community updates
- Deliver project messaging, marketing and enable member recruiting.
- Improving user and development guide documentation
- Enable translation of documentation and engage with translation communities
User Experience (UX) WG
This is the newest WG in Dronecode that was approved at the last TSC meeting.
- The group will be coordinating with the Documentation WG
- Previous work by the Intel participants have focused on QGC improvements and that would continue
- The WG will look for opportunities to improve the User Experience of interacting with Dronecode documentation, platforms, developer channels, repositories, etc, and help to implement a continuous improvement process.
Challenges
TSC members are busy with their day-jobs and it’s difficult to get focused attention on Dronecode issues.
Plan for next month
- Hold monthly TSC meeting and provide monthly update
- Summarize TSC activities for the Dronecode Board Meeting
- Follow up on action times from last TSC meeting
The Camera Working Group (WG) is focused on platform-independent developer APIs for cameras, and for remote control of camera and gimbal. APIs under investigation currently include:
- Remote Camera and Gimbal Control APIs
- Video Streaming APIs
- C/C++ developer camera APIs (FPV, Snapshot, Recording, Optic Flow, and Stereo)
Check out our accomplishments and challenges for March 2017 below, along with our plans for April.
Accomplishments
- MAVLINK Camera and Gimbal API improvements were merged (Julian Oes):
- Optic Flow support for Bebop was merged:
- Qualcomm Technologies Inc provided links to the platform independent Camera APIs used in Snapdragon Flight, for consideration and comment from TSC and Camera WG (the APIs are already public):
- https://source.codeaurora.org/quic/le/platform/hardware/qcom/camera/tree…
- https://source.codeaurora.org/quic/le/platform/hardware/qcom/camera/tree…
- There is a sample app using the API on Github:
Challenges
- Waiting for feedback on the proposed C++ Camera API.
- HW Availability for Snapdragon Flight Stereo Camera.
- Issues with PX4 Optic Flow on Snapdragon Flight
- uORB issues blocking (should now be resolved).
- Intel Aero and Snapdragon flight Optic Flow integration with PX4 currently not working.
- Code availability for Intel Aero video API.
Plan for next month
- Continue working on Optic Flow support in PX4.
- Continue working on VISLAM support for PX4.
- Review feedback on Camera API.
Additional Information for working with Camera and Video
- Intel’s work on video streaming with GStreamer:
- Camera Streaming custom MAVLink message (discuss.ardupilot.org)
- Snapdragon Flight supports video streaming via live555:
- Snapdragon_Linux_Camera_Interface_Specification.pdf
- Note that the use of GStreamer or live555 should not be exposed to the final video streaming API. The API should be agnostic to the underlying implementation.
- Camera information for Snapdragon Flight is in Chapter 4 of:
- Optical Flow on the Snapdragon Flight:
- Optical Flow on the Snapdragon Flight (PX4 Dev Guide)
- https://github.com/PX4/snap_cam
- Information on the Intel Aero Vision Kit is at:
Some data from that presentation:


- joystick SDK startup fix (#4436)
- fixed iOS connection issue (#4409)
Addresses font and button sizing issues on mobile devices, adds a configurable mag calibration for PX4. Flight mode updates for APM.
]]>This release improves the fly view button handling and improves the user experience for PX4 tablet-only flight control.
]]>Minor fixes to arming control for better cross-stack compatibility.
]]>-Attitude indicator correctly updates when displayed in horizontal orientation instrument panel (small phone screens, virtual joystick turned on)
-Video working correctly on Windows
-Properly convert knots to m/s
-Fix crash on Vehicle disconnect
- Add support for redirect on file download (fixes ArduPilot firmware download)
New Features
- Survey mission support
- GeoFence Support in Plan View
- Rally Point support in Plan View (ArduPilot only)
- ArduPilot onboard compass calibration
- Parameter editor search will now search as you type for quicker access
- Parameter display now supports unit conversion
- GeoTag images from log files (PX4 only)
- System health in instrument panel
- Mavlink 2.0 support (no signing yet)
Major Bug Fixes
- Fixed crash after disconnect from Vehicle
- Fixed android crash when using SiK Radios
- Many multi-vehicle fixes
- Bluetooth fixes
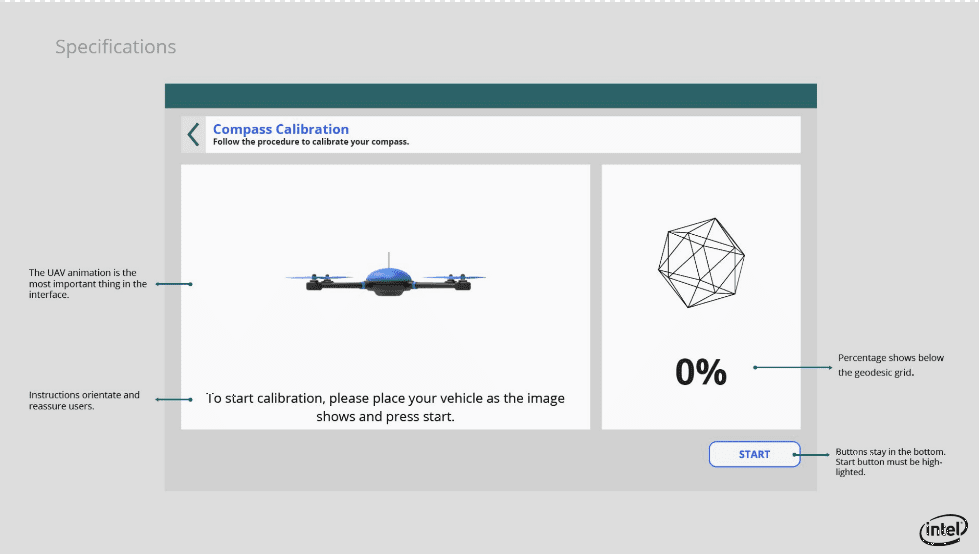

with Xilinx® Zynq®) in January of this year, Aerotenna, a Dronecode Silver member, is set to release a second SoC flight controller on August 16 at the Intel Developer Forum (IDF16) in San Francisco. Aerotenna’s new OcPoC (Octagonal Pilot on Chip) open-source flight control platform is based on the Intel® Altera Cyclone® V SoC and leverages the combination of ARM® core and FPGA logic to enable superior sensing and processing capabilities for “smart” drones. Members of the drone community seeking more processing capability, I/O expansion and flexibility in sensor fusion to power their UAV applications now have another solution from Aerotenna to realize their goals.
OcPoC with Altera Cyclone® Highlights:
- First Intel® SoC FPGA-based flight controller
- Utilizes Enpirion® power modules
- >100 I/Os for sensor integration
- Video streaming and processing
- Enhanced GPS and IMU sensor packages
- ArduPilot (APM) compatible (dronecode.org)
- Open-source platform (hardware, software)
OcPoC with Altera Cyclone® SoC flight controller
Also on display at IDF16 will be Aerotenna’s signature μ series microwave radars, the μLanding compact altimeter and the μSharp 360° sense-and-avoid radar. Together with OcPoC, Aerotenna’s microwave radars unleash your drone to achieve safe and reliable autonomous flying. Community members attending IDF are encouraged to stop by Aerotenna’s demo in the Intel Pavilion to experience the μLanding and μSharp microwave radars. There will also be a live demo showcasing drones equipped with the OcPoC with Altera Cyclone® SoC flight controller. On August 18 at the Intel SoC FPGA Developer Forum (ISDF16), Aerotenna co-founder and CEO Zongbo Wang will present a technical session to introduce the SoC FPGA-based solution for drones.

μLanding and μSharp microwave radars
Giving Back to the Community
To benefit the drone community, Aerotenna is partnering with the Dronecode project to create advanced processing platforms for the ArduPilot system. All board-support-packages, drivers, firmware, and software will be released as open-source to allow more users to easily access the advantages and benefits of SoC technology. Aerotenna will also give priority for shipment and support to companies and developers who are part of the Dronecode community. Please contact Aerotenna team [email protected], if you are interested in becoming the first user of OcPoC.
]]>This report is about the findings from the test which the main purpose was to observe final users (including non-developers and beginners on drones stuff) dealing with the software interface to address gaps and opportunities from a more realistic point of view improving the overall usability.
Please see: https://qgroundcontrol.gitbooks.io/qgroundcontrol-usability-test-report/content/
]]>
We’re been hard at work at 3DR on system architecture and looking into new ways of building adaptable UAV systems.
Solo in particular leverages a number of distributed systems–vehicle, controller, and app–that continue to enable industry-leading flight autonomy–smart shots, and now the shot modes on etc. The complexity of UAV systems is only increasing, and handling messaging and data distribution between these systems in a reliable, high performance way is a complicated challenge.
After evaluating a number of options, we have selected eProsima Fast RTPS, a messaging middleware developed by eProsima, to power system-level messaging and data distribution on our future platforms. Fast RTPS is an open-source implementation of the RTPS standard. RTPS (Real Time Publish Subscribe) comprises the transport layer of the DDS standard developed and maintained by the Object Management Group.
We selected eProsima Fast RTPS over other available implementations for a number of reasons. Fast RTPS is feature complete, providing support for many of the advanced features available in RTPS that we’re excited about. Given our history of contributing to and supporting open source projects, Fast RTPS being open source was another compelling factor for us. Finally, Fast RTPS is also more approachable than other options we evaluated, increasing our confidence that we could make any necessary modifications and contribute fixes back upstream.
In connection with 3DR’s adoption of Fast RTPS, eProsima intends to join the Dronecode foundation to encourage further adoption of Fast RTPS. We’re also happy to announce that upcoming licensing modifications will enable Fast RTPS to be distributed on mobile platforms. Although Fast RTPS is currently licensed under the LGPLv3, eProsima plans to provide an alternative license for Fast RTPS, enabling use of Fast RTPS under MPLv2, a license developed by the Mozilla Foundation. MPLv2 retains many attributes of LGPLv3 while allowing users to embed Fast RTPS in mobile applications.
3DR is not alone in the decision to use RTPS for data distribution on complex robotics platforms. The Open Source Robotics Foundation, developers of the ROS and ROS2 operating system, have also decided to use RTPS to power future systems. To further facilitate adoption and use of Fast RTPS, eProsima offers options for commercial support and development for companies seeking to use Fast RTPS in their platforms.
Looking for more information? Fast RTPS is available on Github and you can download from eProsima web site the latest binaries. Discussions about Fast RTPS (and RTPS generally) have already started in theDronecode forums.
More about eProsima…
eProsima, The Middleware Experts, is a company focused on High Performance networking middleware. eProsima provides insight to develop your distributed systems recommending the right middleware products and supporting you in all the stages of the development.
]]>
- Date: Thursday, April 28, 2016
- Location: Beijing
- Country: China
- URL: http://www.huodongxing.com/event/8331183276600

We had interesting presentations from around the world.
Thank you to everyone who participated and an extra thanks to those who presented.
We look forward to working with all of you and growing Dronecode even more this year.
]]>- Date: Thursday, April 7, 2016
- Venue: San Diego Marriott Marquis
- Location: San Diego, CA
- Country: USA
- URL: https://www.regonline.com/dronecodeunconference
- Registration: https://www.regonline.com/Register/Checkin.aspx?EventID=1815315
The Dronecode Foundation meetings will be held in conjunction with the 2016 Embedded Linux Conference (ELC). ELC is the premier vendor-neutral technical conference for companies and developers using Linux in embedded products. This conference, now in its 12th year, has the largest collection of sessions dedicated exclusively to embedded Linux and embedded Linux developers, with tracks on Automotive Linux, IoT and Drones.
We will have a room all day for talks and discussions on all things related to DroneCode.
Agenda:
Member meeting
(Member representatives & invitees)
Registration is available to Dronecode members only, and subject to approval. To register, please select the Member Meeting option when you register.
8:00 am. – 8:30 am. Check-in at registration desk
8:30 am. – 9:30 am. Welcome followed by address by Brandon Basso, VP Software Engineering 3DR
9:30 am. – 10:30 am. The Dronecode software stack, by Lorenz Meier
10:30 am. – 10:45 am. Coffee Break and Networking
10:45 am. – 11:15 am. Silver Member Insights and Priorities, Discussion led by Jaime Machuca
11:15 am. – 11:30 pm. Open Q & A Session.
11:30 pm – 12:00 pm. Break for lunch.
Technical Community Session
(open to the community)
Dronecode Technical Team “Unconference” and Steering Committee meeting
FOR PEOPLE JOINING REMOTELY PLEASE CONNECT TO: https://bluejeans.com/938946672
12:00 – 5:30pm
Speaker lineup:
12pm Roman Bapst
VTOL – From Quad Planes to Tailsitters
Ramon Roche
Beginners DroneKit
Advanced DroneKit
1pm
Lucas De Marchi
Intel, Linux, and Dronecode development
Jaime Machuca
Drones and Camera control using MAVLink
Tom Pittenger
Advanced Plane functions
2pm
Zongbo Wang 15
Flying with SoC – hybrid FPGA and ARM processing platform for UAVs
Richard Parker 15
Airspace management
Randy Mackay 15
Copter Roadmap
245-3pm break
3pm
Don Gagne
Creating a new user interface for QGroundControl
Lorenz Meier
Towards full 3D Obstacle Avoidance on Open Source Drones
Pavel Kirienko
CAN ESC
Adam Paugh
ADSB Support
4pm
Andrew Tridgell
MAVLink 2.0 work in progress
John Finley
Drone communication via RTPS
Liam Staskawicz
Drone message formats – harnessing work from other fields
5pm
Open Discussion and wrap up[/vc_column_text][/vc_column][/vc_row]
]]>
The uAvionix Ping is the smallest and lightest ADS-B transponder available for unmanned aircraft. At only 6gr it is able to detect all aircraft threats within a 30 statue mile radius in real time. The MAVlink based communication protocol found throughout the ArduPilot/APM autopilot line provides a plug-n-play integration of the uAvionix Ping transponder. The partnership will allow opportunities and new ways of combining the technical knowledge and inventive spirit of the two leaders in their respective fields.
“Being able to access the Dronecode application ecosystem will provide huge advancements in real-time sense and avoid behavior,” said Adam Paugh, uAvionix’ Director of Business Development. “This collaboration in open source ArduPilot-based development with standardized protocols, such as MAVLink, will accelerate deployable solutions for agile and reliable operation in the national airspace.”
The open source platform has been adopted by many organizations on the forefront of drone technology, including 3DRobotics, Parrot, Qualcomm, Intel, DroneDeploy, Yuneec, Airphrame, and others. With over 750,000 users and nearly 500 active developers it represents the largest community of UAV professionals and enthusiasts in the world today.
The alliance has identified project leads for three technical working groups to ensure development standardization and interoperability.
Andrew “Tridge” Tridgell – lead for ArduPlane
Randy MacKay – lead for ArduCopter
Craig Elder – technical manager for DroneCode
“The PING ADS-B receiver by uAvionix increases my flight safety by giving a sense and avoid capability that would allow me to avoid other full-scale aircraft,” said Airphrame’s Mechatronics Engineer Tom Pittenger. “That is a real concern that all drone companies should have so this is a must-have feature in the drone industry. It is an easy drop in feature to my ArduPilot based aircraft and ‘just works.’”
About Dronecode
Dronecode Foundation is a nonprofit organization working on a common, shared open source platform for Unmanned Aerial Vehicles (UAVs). Dronecode brings together existing and future open source UAV software projects, including the APM UAV software platform originally developed by 3DRobotics. More than 1,200 developers are working on Dronecode’s six projects focused on maximizing adoption of the project’s cost-effective, reliable and technologically advanced UAV software. A Linux Foundation Collaborative Project, Dronecode is an independently funded software project that harnesses the power of collaborative development to fuel innovation across industries and ecosystems.
About uAvionix Corporation
uAvionix develops the world’s smallest, lightest and most affordable ADS-B transponder, Ping. uAvionix’ Ping network system combines hardware, software, and real time airspace mapping to enable companies to safely and reliably operate drones in the NAS. Based in Palo Alto, uAvionix has gathered a cross-disciplinary team of experts in embedded RF engineering, sUAS operations and compliance, hardware, software, and cloud services.
]]>
This study follows the report http://diydrones.com/profiles/blogs/users-feedback-report-around-gcs-software-investigation [2] on the Ground Control Station’s Usage survey results, released in September 2015, and is part of Intel’s growing contributions to the foundation, especially in improving both Ardupilot and QGroundControl. The improvements will ensure they are robust and can be used on an ever-increasing amount of drones with computing needs that require a more fully-featured OS such as Linux.
]]>OcPoC is engineered to be a ready-to-fly “box” with integrated IMU, Barometer and GPS receiver, and features a CSI-camera interface to support high-resolution video streaming. OcPoC also provides reconfigurable I/Os and sensor integration options to enable developers to power their ideas. The combination of dual ARM cores plus FPGA logic enables a hardware/software co-design approach that places some of the timing-critical processing tasks in the programmable logic. Thus the I/O peripherals and memory interfaces provide near-real-time access speeds, and are more versatile than the ones provided by MCU-based platforms.
Aerotenna has successfully ported the whole ArduPilot system onto OcPoC, running Petalinux. The Zynq configuration bitstream file and Linux boot loader will be provided as a pre-built option to make it easy to set up.
Features:
- Xilinx Zynq SoC-based processing structure
- Dual-core ARM processor and FPGA for real-time processing
- Integrated IMU sensors and GPS receiver
- Compatible with ArduPilot flight control system
- Versatile and flexible input/output options
- Efficient octagonal design with flexible sensor integration capabilities
OcPoC Launch Program and Special Dronecode Offer
Aerotenna has also announced the OcPoC Launch program, which gives its applicants the opportunity to beta test OcPoC on different airframes and with other sensors to help perfect OcPoC. The priority of shipment will be given to companies and senior developers who are a part of the Dronecode organization, and may also be exempted from paying the required deposit.
For more information on OcPoC, OcPoC Launch Program, please visit OcPoC webpage at www.ocpoc.com or http://aerotenna.com/ocpoc/.
]]>Investments in project nearly triple in year one; Qualcomm ups its commitment; and three new working groups formed.
SAN FRANCISCO – January 12, 2016 – Dronecode, the nonprofit organization developing a common, shared open source platform for Unmanned Aerial Vehicles (UAVs), today announced major milestones that include investments from 27 new member organizations and the formation of technical working groups to advance the Dronecode open source platform for UAVs.
With investments from more than 50 member organizations, Dronecode has nearly tripled membership since its formation. One of the founding members, Qualcomm Technologies, Inc., a subsidiary of Qualcomm Incorporated, has increased its investment to the platinum level as it introduces new products for the UAV ecosystem. Qualcomm Technologies, Inc. recently launched Qualcomm® Snapdragon Flight, a highly integrated 58x40mm board targeted specifically for consumer drones and robotics applications. Snapdragon Flight is based on a Qualcomm® Snapdragon 801 processor, along with Dronecode PX4 open source UAV software and robust connectivity, bringing cutting-edge mobile technologies to create a new class of consumer drones.
The highest growth rate for drones or UAVs is commercial opportunities across applications in areas such as agriculture, energy, utilities, mining, construction and more (BI Intelligence’s “Drone Market Forecast 2015”). By uniting the industry around a neutral, open source platform, the Dronecode Project aims to help the drone industry overcome software and hardware barriers to accelerate drone adoption for these critical applications.
The newest Dronecode members include silver members Aerotenna LLC, AirMap, Airphrame, Altitude Angel, AutoModality, BirdsEyeView Aerobotics, CUAV, Droidika, Dig.y.Sol, DroneDeploy, DroneWorks Inc., Emlid, EnRoute, Falcon Unmanned, Hex Technologies Limited, Incite Focus, Inspectools, Matternet, ProfiCNC, Sentera, Skedans, Yin Yan Tech US Inc. and Zubax. New sponsored members include Humanitarian UAV network, OpenTX Project, Stanford University Aerospace Design Lab and UAVCAN.
The Dronecode Project is also forming three technical working groups to ensure better standardization and interoperability in the areas of camera and gimbal controls; airspace management; and hardware/software interfaces. Details include:
- MAVlink Camera Working Group: aims to assist camera manufacturers implementing the MAVlink protocol in cameras. The group will also work with developers and manufacturers to expand the Dronecode platform so that it can support additional cameras and functions.
- Airspace Working Group: formed to establish common data types, units and formats that all airspace providers can transmit and receive. The working group will also lead the discussion on best practices for how to ensure separation between aircraft(s) and establish agreement on common response behavior.
- Hardware Working Group: the mandate of the hardware working group is to establish mechanical and electrical standards for interfaces to the autopilot and the peripherals. This will create a more formal interface between hardware and software development and unite efforts between Dronecode members and the open source developer community working to advance UAVs.
“From increasing member investments to a growing, vibrant developer community, the Dronecode Project’s first year has been extremely exciting,” said Chris Anderson, Dronecode Board of Directors chairman. “By bringing efforts together to establish a common platform and utilizing open source best practices, we’re able to build the foundation for a new era of drone applications that extend from the camera to the cloud. The Dronecode “full-stack” platform approach, combined with the hardware and software innovations of its members, will bring about a new generation of drones that are autonomous, aware of their environments, and continuously connected — an airborne Internet of Things.”
The Dronecode Project is a Linux Foundation Collaborative Project. Founded in 2000, The Linux Foundation today provides tools, training and events to scale any open source project, which together deliver an economic impact not achievable by any one company. More information can be found at www.linuxfoundation.org.
About Dronecode Project
Dronecode Foundation is a nonprofit organization working on a common, shared open source platform for Unmanned Aerial Vehicles (UAVs). Dronecode brings together existing and future open source UAV software projects, including the APM UAV software platform originally developed by 3DRobotics. More than 1,200 developers are working on Dronecode’s six projects focused on maximizing adoption of the project’s cost-effective, reliable and technologically advanced UAV software. A Linux Foundation Collaborative Project, Dronecode is an independently funded software project that harnesses the power of collaborative development to fuel innovation across industries and ecosystems. https://www.dronecode.org
# # #
The Linux Foundation and Linux Standard Base are trademarks of The Linux Foundation. Linux is a trademark of Linus Torvalds. Qualcomm and Snapdragon are trademarks of Qualcomm Incorporated, registered in the United States and other countries. Snapdragon Flight is a trademark of Qualcomm Incorporated. Qualcomm Snapdragon Flight and Qualcomm Snapdragon processors are products of Qualcomm Technologies, Inc.
Media Contact
Whitney True
The Linux Foundation
[email protected]
504.427.1242
We are nearly ready for the 3.5.0 release, with a lot of new features. Key features include
- parachute support
- RTK GPS improvements
- QuadPlane support
- Qualcomm Flight support
- improved landing abort
- waf build system
- ADS-B adapter support
- new SITL plane and quadplane simulator
- switch to EKF2 by default
Copter:
Version 3.3.2 released Dec 1st to resolve some issue found including:
- bug fix for desired climb rate initialisation that could lead to a drop when entering AltHold, Loiter, PosHold (video)
- Fix to hard landings when WPNAV_SPEED_DN set high in RTL, Auto (resolved by using non-feedforward alt hold)
- EKF fix to reduce “Bad AHRS” message by filtering innovations
- Allow arming without GPS if using Optical Flow
- Smoother throttle control in Guided mode (incl follow me) by increasing control rate to 400hz.
Support for new flight controllers in master:
Architectural improvements:
- Quaternion rate controller
- Attitude controller interface renaming and internally uses SI units
- removing Frame_Config #defines in preparation for run-time vehicle selection in future
Features in progress only some of which will make Copter-3.4
- Throw mode (video)
- Motor library refactoring to better allow modularization
- Precision Landing video
- Terrain Following
Trad Heli:
- 3.3 is ready to go stable for TradHeli.
- Waiting on the 3.3.3 release for Multirotors to make the release process easier to manage. Last change to go in was to force 1 m/s descent rate if the motor is switched off in flight in an auto-collective mode.
- For 3.4, the internal-governor code is well underway, mostly useable for gassers. This included some improvements to the RPM measuring code which benefits all.
- The airplane guys might also be interested in the governor code for variable pitch props, but it may also benefit them to have the throttle control prop RPM instead of simply throttle.
Antenna Tracker:
Version 0.7.5 released which includes:
- dataflash logging
- fixed occasional pitch problems by requesting baro from vehicle at 1hz
Linux:
- A new build system was added to allow integrating unit tests, benchmarks and simplify the support for the several boards. The basic infrastructure is in place and boards are being gradually migrated from the old build system.
- Support for generic auxiliary bus on MPU9250 was added in order to support additional sensors on this bus and also allow MPU9250 to be connected on an I2C bus.
- Now we can use kernel drivers to drive PWM output. This allows them to be used for RCOutput, PWM Heater and also aux channels.
- General improvements to the codebase was made in order to detect better the Linux boards and share more code among them. New boards are always being added and for this cycle there was support added for Bebop2, Bhat (RPI-based) and qflight (a Linux port for Qualcomm’s Snapdragon). AP_Progmem and other legacy libraries from when AVR-boards were supported were completely removed to improve the code.
- PX4Flow algorithm was implemented using V4L2 APIs allowing to connect USB cameras. Right now only some of them are supported but new ones can be added by converting the video format they support to one of the formats supported by the algorithm.
- The Linux boards now support the perf API to time each event in the scheduler. Support for getting this values from the flight stack is still under work.
- AP_Math library continues to be refactored to include safer and faster methods and at the same time modernized the code base.
PX4 Flight Core:
Last quarter saw a significant investment in infrastructure.
- The whole project switched to the CMake build system with Ninja replacing GNU Make as the default build tool. This speeds up incremental builds by several orders of magnitudes and greatly improves the development experience.
- SITL is now implemented with jMAVSim and Gazebo as backends and multicopter to VTOL support.
- UAVCAN nodes can be upgraded directly from the autopilot and the default build carries up-to-date binaries for the first two ESCs.
- A new tailsitter simulation in Gazebo is available and we simulate now optical flow and lidar data directly in Gazebo with real flow calculation.
- The PX4 dev team created a Wifi Firmware for the ESP8266 with considerably better throughput than existing solutions. This allows MAVLink telemetry and Firmware upgrade. Qualcomm Snapdragon support for PX4 was released October 2015 by Qualcomm with proprietary drivers. Now the generation 2 of this API reached testing status, based on DriverFramework and open source drivers. This allows the reuse of the framework across projects and for different hardware.
- New Pixracer support for final hardware revision. With support for this racing board came also the popular Rattitude flight mode. Current prototypes are incompatible and will not be maintained.
- Introduction of the Estimation & Control Library: A flight stack independent modular library including EKF2 (which is an error-state formulation and currently in flight testing).
- Refinements in VTOL support (Tailsitter, Tiltrotors, Quad Planes (video)) including automatic transitions in missions. New support for coaxial helicopters. PX4 now also knows how to autonomously takeoff and land on runways (video).
Qualcomm:
- Working on improving upstream support for PX4 and providing support to the APM project for their port to QuRT. DriverFramework now runs on QuRT on an upcoming DSP image release. Consolidated build environment using CMake
- https://github.com/ATLFlight/cmake_hexagon
- https://github.com/ATLFlight/DriverFramework/tree/master/os/qurt
UAVCAN:
- Significant progress in development of Python library (pyuavcan) and lightweight C library for resource constrained systems (libcanard).
- Second release candidate of Libuavcan is now available.
Mission Planner:
- Support for a vlc supported video stream on the hud
- a customizable preflight list is not available
- rtcm/sbp packet information display for rtk operations
QGroundControl
- Largest change is APM Stack support including vehicle setup
Originally posted on DIY Drones by Andrew Tridgell.
The ArduPilot development team is proud to announce the release of the first beta version of the 3.5.0 release of APM:Plane. We think this is going to be a great release and we’d love some feedback before we do the final version.
The biggest changes in this release are:
- switch to new EKF2 kalman filter for attitude and position estimation
- added support for parachutes
- added support for QuadPlanes
- support for 3 new flight boards, the QualComm Flight, the BHAT and the PXFmini
- support for arming on moving platforms
New Kalman Filter
The 3.4 release series was the first where APM:Plane used a Kalman Filter by default for attitude and position estimation. It works very well, but Paul Riseborough has been working hard recently on a new EKF variant which fixes many issues seen with the old estimator. The key improvements are:
- support for separate filters on each IMU for multi-IMU boards (such as the Pixhawk), giving a high degree of redundency
- much better handling of gyro drift estimation, especially on startup
- much faster recovery from attitude estimation errors
After extensive testing of the new EKF code we decided to make it the default for this release. You can still use the old EKF if you want to by setting AHRS_EKF_TYPE to 1, although it is recommended that the new EKF be used for all aircraft.
Parachute Support
This is the first release with support for parachute landings on plane. The configuration and use of a parachute is the same as the existing copter parachute support. See http://copter.ardupilot.com/wiki/parachute/
Note that parachute support is considered experimental in planes.
QuadPlane Support
This release includes support for hybrid plane/multi-rotors called QuadPlanes. More details are available in this blog post: http://diydrones.com/profiles/blogs/quadplane-support-in-apm-plane-…
Support for 3 new Flight Boards
The porting of ArduPilot to more flight boards continues, with support for 3 new flight boards in this release. They are:
- the BHAT board
- the PXFmini
- the Qualcomm Flight
More information about the list of supported boards is available here: http://ardupilot.org/copter/docs/common-autopilots.html/
Startup on a moving platform
One of the benefits of the new EKF2 estimator is that it allows for rapid estimation of gyro offset without doing a gyro calibration on startup. This makes it possible to startup and arm on a moving platform by setting the INS_GYR_CAL parameter to zero (to disable gyro calibration on boot). This should be a big help when flying off boats.
That is just a taste of all of the improvements in this release. In total the release includes over 1500 patches. Some of the other more significant changes include:
- RPM logging
- new waf build system
- new async accel calibrator
- SITL support for quadplanes
- improved land approach logic
- better rangefinder power control
- ADSB adapter support
- dataflash over mavlink support
- settable main loop rate
- hideable parameters
- improved crash detection logic
- added optional smooth speed weighting for landing
- improved logging for dual-GPS setups
- improvements to multiple RTK GPS drivers
- numerous HAL_Linux improvements
- improved logging of CAM messages
- added support for IMU heaters in HAL_Linux
- support for RCInput over UDP in HAL_Linux
- improved EKF startup checks for GPS accuracy
- added raw IMU logging for all platforms
- added BRD_CAN_ENABLE parameter
- support FlightGear visualisation in SITL
- configurable RGB LED brightness
Many thanks to everyone who contributed to this release! The development team is growing at a fast pace, with 57 people contributing changes over this release cycle.
I’d like to make special mention of Tom Pittenger and Michael du Breuil who have been doing extensive testing of the plane development code, and also contributing a great deal of their own improvements. Thanks!



The shield has been designed with a low cost attitude and specially for the Raspbery Pi Zero but it is also compatible with other boards from the Raspberry Pi family.
The board complies with the new Dronecode Connector Standard and delivers:
-
8 PWM servo outputs
-
PPMSUM input
-
MPU9250 Inertial Measurement Unit
-
MS5611 digital Barometer
-
Power module connector
-
UART, 2x I2C for extensions
-
3 status LED
The smallest Linux autopilot within Dronecode
With its 31mm x 71 mm and only 15 grams, the PXFmini together with the Raspberry Pi Zero form the smallest Linux autopilot with support for the Dronecode flight stacks in the market.
The design is based on previous iterations with proper APM upstream support and provides 8 PWM output channels as well as a PPMSUM input. It’s embeds all the power electronics necessary to comply with most of the existing components for drones using its 2xI2C and UART extension ports.

Gravity sensors, digital compass, gyroscopes and more
PXFmini includes a 9 axes MPU9250 Inertial Measurement Unit delivering 3 axes acelerometers, magnetometers and gyroscopes.It also includes an MS5611 digital barometer and an ADC for voltage measurements.

Dronecode Autopilot Connector Standard compliant
The PXFmini complies with the Dronecode Autopilot Connector Standard and makes use of the JST GH connectors to provide an amazing new experience. Forget about breaking connectors, the new JST GH provide:
-
Secure and simple locking/unlocking structure
-
Prevention of contact deformation
-
Clear engagement with click sounds
Open design
Erle Robotics will be opening up the schematics so that others can build on top

The PXFmini is now available at Erle Robotics webstore and will start shipping next February 2016.
]]>![]()
- Date: Wednesday, December 16, 2015
- Venue: San Diego Convention Center
- Location: San Diego, CA
- Country: USA
- URL: http://www.robouniverse.com/san-diego/2015/
- Exhibit Hall Hours: Tuesday, December 15: 10:00 am – 7:30 pm | Wednesday, December 16: 10:00 am – 3:15 pm
Tutorial Session: (1-3pm, December 14th) , lead by Craig J. Elder, Community Technical Manager, Dronecode
The Dronecode Platform – Getting Started with Layers in the Stack of Open Source Projects for Drones Dronecode is an open source, collaborative project that brings together existing and future open-source drone projects under a nonprofit structure governed by the Linux Foundation. More than 1,200 developers are working on Dronecode with more than 150 code commits a day on some projects. Now YOU can get involved and learn about the excitement around Dronecode development opportunities.
In this workshop, you’ll learn about open source projects that control flight, enable mission planning, and otherwise make drone flight and advanced functionality possible.
This platform has been adopted by many of the organizations on the forefront of drone technology, including 3DRobotics, Parrot, Qualcomm, Intel, DroneDeploy, Yuneec, Walkera, and others.
In this workshop you’ll learn about:
- Getting started with Dronecode. What it is, Why it’s important and How to get involved with projects.
- Comms and APIs: DroneKit by 3DR, ROS by OSRF and DroneKit SDK
- Flight Code
- Coding Compatible Ground Control Stations
- Firmware and Open Hardware Options
- Supported Simulation Environments including JMavSim, SITL, ROS Gazebo Simulator and more.
Dronecode has established itself as one of the most advanced flight control platforms available today. This workshop will allow you to get started with the dronecode movement.
]]>The working group is being lead by Richard Parker of Altitude Angel and we have Tom Pittinger from Airphrame (who has been implementing ADS-B support), Ben Marcus from Airmap, and Marcos Osorno from Skyward.
We are delighted to have participation from these companies and developers working together as we move forward with integrating our UAVs into the international airspace systems The mandate of the group is to: 1. Establish standards used for common data types, units, and formats that all vehicles transmit and receive and common data types, units, and formats that the airspace information providers transmit and receive. 2. To lead the discussion on best practices for how to ensure separation between aircraft, which can then lead to agreement about common response behaviour.
]]>Qualcomm Technologies Inc (QTI) has ported code from the DroneCode project to support UAVs based on a heterogeneous multi-core SoC. This talk gives a brief introduction to the SW projects hosted at the DroneCode Project, a high level overview of the architecture of the PX4 code, and the modifications made by QTI to support running the inner loop code on the Hexagon DSP, allowing the multicore ARM compatible Krait processors to run the outer loop code and other CPU intensive functions such as image processing. The talk also highlights some of the future additions QTI would like help make as an active member of the Dronecode Project.
Speakers
Mark Charlebois
Director, Engineering, Qualcomm Technologies Inc

Some have asked if it was a mistake to name our board “XRacer”, be assured this was a well thought out decision. DIY flight controller software development in and for the FPV / FPV Racing communities are pushing the limits, capabilities and ease of use. Like many other complimentary industries we will all benefit. Think about the technology that has filtered from car racing to the average consumer automobiles or the various space agency derived tech that we use each and every day. This flight controller, like all of our designs is expertly engineered and manufactured leaving no doubt it can be used on any vehicle it can be fit to.
XRacer V1 specifications:
- MCU – STM32F427VIT6 rev.3
- FRAM – FM25V02-G
- Ultra low noise LDOs for sensors and FMU
- MPU9250, HMC5983 ( optional ), ICM20608 ( optional ), baro MS5611
- Connectors – GPS+I2C, RC-IN, PPM-IN, RSSI, SBus-IN, Spektrum-IN, USART3 ( TxD, RxD, CTS, RTS ), USART2 ( TxD, RxD, CTS, RTS ), FRSky-IN, FRSky-OUT, CAN, USART8 ( TxD, RxD ), ESP8266 ( full set ), SERVO1-SERVO6, USART7 ( TxD, RxD ), JTAG ( SWDIO, SWCLK ), POWER-BRICK ( VDD, Voltage, Current, GND ), BUZZER-LED_BUTTON
- MicroSD card reader
- RGB LED
- Micro USB
- ESP8266 802.11bgn ( optional )
- Dimensions – 36 x 36mm with 30.5 x 30.5mm hole grid with 3.2mm holes
- Molex Clik-Mate or JST GH series connectors for easy and robust peripheral connections
- Full set of professional grade silicone cables for almost any peripheral module.
- Power supply – 5-5.5VDC from USB or PowerBrick connector. Soon the ACSP4 ( 36 x 36mm power distribution, current, voltage sensor with 5V/2.5A ultra low noise buck and 12V/2A ultra low noise buck ) companion will be announced.
The price will be less $100USD and shipments are expected to begin in early December.
We are proud to be DroneCode members and look forward to contributing to the future DroneCode hardware platforms.
Thank you again for your support.
Phillip Kocmoud and Nick Arsov
AUAV.CO – Expect Good Things!
]]>
The design is based on Black Magic Probe and is distributed under open source licenses. Learn more about its features and capabilities on the documentation page (link below).
Brief review
- Debugging via standard GDB.
- No extra software is required (e.g. unlike Open OCD, no daemon is needed).
- Works with Linux, Mac and Windows.
- Works with Eclipse and other IDE.
- Supports STM32, LPC11, LM3S – see http://www.blacksphere.co.nz/main/index.php/blackmagic for the full list.
- Tiny form-factor.
- Standard DroneCode and ARM connectors.
Links
]]>Initial implementation of the actively loiter at waypoint has been completed and should make it into master ready for BETA shortly. This functionality is especially important to boats. If a boat is loitering at a waypoint and there is a current or a strong breeze it can be pushed off the waypoint as the motor(s) are idle. This new functionality turns the motors back on and returns to the waypoint if the boat drifts outside the configured WP_RADIUS.
The development of the Arming code into Rover is being completed. There is functionality within ArduPilot that is now dependant on the Arming checks done at startup and without this functionality in Rover it is missing out. These arming checks will ensure the vehicle is in a fit state to be operated before arming and subsequent operation is allowed.
Plane
- EKF2 continues to be developed. This new math’s solution is much faster than the original EKF and provides better solutions under some of the more complex corner cases.
- 3.4 Release of Plane has been a huge success with users report effectively zero issues.
- Trimble RTK GPS support has been added to the code base for higher accuracy GPS navigation. We would love to get some feedback on any users who are able to test with this GPS.
Copter
- Work beginning on improving fence to cause copter to stop before the limits of the circular fence in Loiter instead of going through and switching to RTL. Ceiling to also be fixed so that it stops again, this was impacted by addition of climb-rate feedforward.
Trad Heli
- Tradheli 3.3 nearing release. Setup will not be far quicker and easier for users. Optional servo boot-up test added. Acro and Stabilize mode collective pilont input shaping curves added. To include open-loop gas engine control and ignition safety function.
- Coaxial helicopter code continues to develop.Added throttle reduction to improve yaw performance. Yaw output reverse option.
PX4 Flight Core
- We have moved to CMake based build system supporting Make and Ninja and the result has been faster builds.
- We have implemented code style enforcement on driver and platform layers.
- We have also made simplifications to the SITL setup and made significant work on new documentation.
- We have reworked the velocity control for multicopters
Qualcomm
- In process of moving to using PX4 CMake based build
- Working on refactoring drivers for Snapdragon Flight. Looking at how to make the drivers flight stack independent.
- Added backtrace support to PX4 (PX4_BACKTRACE())
- Added patch to Eigen for Hexagon compiler
- Fixed clang build of PX4 posix target on Linux. This will now enable addition of clang sanitizers.
UAVCAN
- We have made a significant memory consumption reduction
- We have the first version with ESC enumeration in testing, supports SV and PX4 ESCs
- We can export UAVCAN parameters via MAVLink
Mission Planner
- Have implemented a new compass UI
- Now supports multiple terrain types with Copter
- We have added basic mavgraphs.xml support for graphing
- Now support direct loading of bin files
QGroundControl
- We have added search support in parameter editor
- The new Mission Editor is now online, old map code and and mission planner has been removed
- The MainWindow is now fully Qml
- We have added the ability to flash custom firmware for px4flow
- We have added the ability to flash stable/master/beta/custom for APM
- QGroundControl will now operate the APM flight stack including all of the flight modes.
APM Mission Editing is coming
We have made large advances in tablet usability. We are moving from Alpha to Beta

ASCII Kolor stitching | 100 pictures | Size: 13822 x 19143 | FOV: 44.37 x 55.77 ~ 19.22 | RMS: 3.64 | Lens: Standard | Projection: Planar | Color: LDR
The details in this image blew me away. You can even zoom in and see someone raking the dirt on the baseball diamond. You can measure the size of the baseball diamond, and look at the grass and see how well it’s growing. I realized immediately how difficult and costly it would be for anyone to get the same image without a drone.
It was so clear to me that individuals and businesses would be able to extract great value from aerial data using drones. This observation prompted me to start Event 38.
Fast forward four years later and not only are drones capturing valuable data, but the data is also incredibly varied. A few of the many interesting ways in which drone data is being used include:
- Crop Scouting a 75-acre cornfield in central Ohio
- Archaeology Expedition: Identifying and locating potential sites for excavation
- Saving Spider Monkeys in Ecuador through Forest Monitoring
- Determine the feasibility of the construction of a hydro-power plant in Uganda
Being able to capture data more frequently, cost effectively and accurately has created a new field of micro remote sensing. Unfortunately, the amount of value that can be extracted from this data has been limited. This is because the tools needed to geotag data, stitch images, run deeper analyses, and even just to explore the imagery have been a patchwork of open source projects and expensive software packages. If you don’t have a background in GIS imaging or software development, even the simplest imagery post-processing tasks can be time consuming and difficult.
Here at Event 38, this is something we kept hearing from our customers, partners and resellers. They were very happy with our drones, sensors and support. Being able to capture data frequently was something they saw great value in. However, using a hodgepodge of post-processing software, opening a 2GB geotiff on their PC and sharing files via a USB drive wasn’t the greatest experience.
To solve this problem and to offer our customers a better experience, we recently announced our Drone Data Management System public beta. The DDMS is a cloud-based set of tools that store, analyze and share data collected by any drone. DDMS streamlines the entire map post-processing workflow. Upload, Process, Analyze and Share. DDMS automatically creates a geotagged orthomosaic and tiles large maps to be viewed quickly in Map Viewer, our online map tool. DEMs, NDVI and DVI calculations can be added as well. All processing results are available as high resolution originals in geotiff format, so you can continue to work with your existing GIS tools. Anything that you process in DDMS can also be privately shared with friends, clients, colleagues and advisors. In the future, we’ll be adding time series analysis, crop stand counts, topographic map exports and ground control point editing.
DDMS YouTube video
Managing data and returning a measurable value to users is the next great challenge in the widespread adoption of drones in business. As we go forward, it’s clear that we need a new set of tools to automate image analysis at this scale. Existing tools mostly focus on the parcel-level and higher because sensors haven’t been able to gather the same level of detail that drones can. Now that we can capture imagery that differentiates leaves on a plant or chips in cement, there is a huge opportunity to solve problems that wouldn’t traditionally use aerial data. As we build new analysis techniques for data at drone scale, we’ll unlock hundreds, if not thousands, of new applications for remotely sensed data.
It’s such an amazing time right now and we’re very excited to be part of the Dronecode Community! Please feel free to contact me anytime with any questions or feedback.
Thank you!
Jeff
ABOUT THE AUTHOR OF THIS POST

Jeff Taylor is the Founder of Event 38. Founded in 2011 and with customers all over the world, Event 38 designs and manufactures drones, specialized optical sensors, and a Drone Data Management System for Construction, Environmental Conservation, Mining, Surveying and Precision Agriculture. Jeff has been fascinated by Flight and Space ever since he was a little kid. Right after graduating college, Jeff joined SpaceX as an electrical engineer where he helped launch and recover the first commercial space capsule to re-enter Earth’s atmosphere. He was also previously the Director of Research and Development at 3D Robotics.
Register Today
https://www.regonline.com/dronecode
Drone Developer Workshop
Monday, October 5th, 2pm-5:30pm.
The Spencer Hotel
Excise Walk, IFSC
Dublin 1
Dublin, Ireland
This half-day Dronecode workshop will allow participants to “get their hands dirty” on the Dronecode technology stack. The workshop will cover tool chain setup (a VM/docker image will be provided), running simulated flights all the way to moving an electric servo motor on real hardware. It will also show how to develop code on Linux which sends commands to the autopilot and will provide a glimpse into how all-in-one Linux board solutions will look like. The workshop is led by Lorenz Meier, PX4 project lead and Tully Foote, platform manger for Robotic Operating System (ROS), will introduce participants to ROS.
Participants only need basic C or Python knowledge and a laptop running a POSIX system with two USB ports. Owners of a gamepad will want to bring it along for some flight simulation fun, but it is not required. Please also ensure that your power supply can be used with Ireland’s UK-style mains (230v, 50Hz). Power conversion will not be available on-site, and your laptop will need to run for 3-4 hours.
Flight Day
Thursday, October 8th, 9:30AM -4:30PM.
Newcastle Aerodrome
Sea Road, Newcastle
Co Wicklow
Google Map!
Transportation from Dublin City Centre will be provided.
(Bus departs at 8:30am)
“Flight Day” is a companion event for participants to show off their UAV capabilities and flight skills, network with industry insiders and apply the knowledge they learned from the Dronecode workshop, in a safe controlled environment. Expect to solve some fun challenges and win prizes. Participants will need to bring their own UAVs, food and beverages will be provided.
Attendance at LinuxCon/ELCE is highly encouraged, but not required in order to attend the Dronecode workshop and Flight day.
The Dronecode workshop and Flight day are supported by 3DRobotics, Atlantic Bridge, Irish Development Agency, Startup Ireland, and the Linux Foundation’s Dronecode Project.
- Plane 3.4 has been released. https://www.dronecode.org/news-faq/blogs/2015/09/apmplane-340-released
- LiDAR support has been continuing with the Lightwave support stablising now.
- There has been significant testing using an external Baro on a plane and it’s proving to be fantastic.
Copter
- AC3.3 ready for wider use http://diydrones.com/profiles/blogs/copter-3-3-ready-for-wider-use
Trad Heli
- TradHeli 3.3RC11 ready
- Development of Hover Roll Trim to compensate Yaw Thrust begun
- Resurrection of old Piro Comp code
- Continued development of Coaxial Heli frame type
Qualcomm
- Tower app now working with PX4
- Added onscreen controls to Tower app
- Starting to test CMake build of PX4 for qurt
- Fixed bug in px4_poll
Mission Planner
- Mission Planner 1.3.32 was released with modification to the log browse functions, improving performance with large logs. Support for multiple component ids was also added, for things like the storm32 gimbal. External elevation support has been added via the use of geotiff files, this should allow the use of high resolution elevation data obtained from other sources.
QGroundControl
- New Joystick configuration screens. Currently only for PX4 Flight stack but I’ll be modding to provide support for generic mavlink as well soon.
- New Qml based Mission Editor is available through a switch on the File menu. Currently an either/or as far as using the new or old Mission Editor. New one is just at testing phase now, not complete and not ready for flying. Likely a week away from completion.
- Many tablet based UI fixes to make UI better on Android.
MAVLink Camera Control working group established on the TSC mailing list MAV Explorer
- Log analysis tool has been created
- http://dev.ardupilot.com/wiki/using-mavexplorer-for-log-analysis/
The Linux Foundation’s Dronecode Project is hosting a workshop in Dublin, Ireland on Oct. 5, as well as a Flight Day event at a nearby airport on Oct. 8, to showcase open source Unmanned Aerial Vehicle (UAV) technology. These events bookend LinuxCon + CloudOpen + Embedded Linux Conference Europe, which is being held Oct. 5-7 at Conference Centre Dublin.
The workshop will be led by Lorenz Meier, PX4 Project lead, and Tully Foote Platform Manager for ROS (Robot Operating System). Meier will demonstrate a PX4 Flight Dronecode stack running on Linux in simulation. The hands-on workshop will also cover toolchain setup using a supplied VM/docker image, as well as driving an electric servo motor with a PX4/Pixhawk autopilot. Foote, meanwhile, will show how Dronecode can interface with ROS.
At the Flight Day event, participants are invited to bring their own UAVs and apply the knowledge learned from the workshop. Prizes will be awarded for various flight challenges, and academic research groups will showcase their projects alongside companies like 3D Robotics’ (3DR) and Parrot.
The Dronecode Project was launched in Oct. 2014 with the goal of uniting open source drone projects and assets and providing a common codebase to help accelerate software development. The project spans from microcontroller-based drones running real-time operating systems like Nuttx to new Linux-driven hybrid designs run that also incorporate RTOSes.
The project, which is governed by the Dronecode Foundation, has made substantial progress in standardizing foundational stacks, and several, mostly Linux-based, UAVs aligned with Dronecode have reached market. New members, such as Parrot, Walkera, and Erle Robotics, have brought the membership to 44, comprising 1,300 active developers.

Walkera’s 2015 QR X350 Pro
The new companies join Platinum members 3DR and Yuneec, Gold members Intel and Baidu, and Silver members including Qualcomm, Box, ProDrone, Falcon Unmanned, and others. Earlier this year, Erle Robotics launched a Dronecode-aligned Erle-Copter in Ubuntu and Ubuntu Snappy flavors, and Walkera launched the 2015 QR X350 Pro, which features a Linux-driven Dronecode flight controller.
The Dronecode Project builds upon two closely related open source drone autopilot platforms, APM/ArduPilot UAV platform, and the PX4 project based at the Swiss Federal Institute of Technology, Zurich.
According to workshop leader Lorenz Meier, the core developer and maintainer of the Pixhawk PX4 Flight Stack software, as well as a Ph.D student at the Computer Vision and Geometry Group in the Department of Computer Science at ETH Zurich, the Dronecode Project is moving from developing basic autopilot flight stacks to addressing higher end functions.
“So far, we have focused on getting the Dronecode flight stacks into industry-ready shape,” says Meier. “While GPS-based flight is in a pretty good shape now, we have set out to tackle the next challenges like obstacle detection and avoidance and tighter integration into the cloud, which would allow dynamic no fly zones. The goal is to make flying easier and safer at the same time.”
“Mid-2016 will be a good time to look at Dronecode and Linux adoption, as companies will have had the opportunity to phase in new technology,” says Meier.
I asked Meier about the rapid transition toward Linux, and whether Linux will soon be able run a drone on its own without a companion microcontroller/RTOS control system.
“Hard-realtime Linux is still a specialized solution, making RT-Linux somewhat hard to integrate based on standard distributions,” says Meier. “We opted instead for a hybrid solution running standard Ubuntu / Debian Linux and a dedicated RTOS side-by-side. The PX4 flight stack that runs on Snapdragon Flight uses Linux for higher end functions, but uses Qualcomm’s QuRT for all safety-critical parts running on the Snapdragon 801’s Hexagon DSP. Similarly, the APM-based 3DR Solo runs Yocto based Linux image, but also runs all safety-critical software on a co-located Pixhawk running NuttX and the PX4 middleware for sensor interfacing.”
I also asked Meier about the integration of Dronecode technology with ROS, which was designed for terrestrial robots, but is increasingly being used on drones such as the Erle-Copter.
“ROS is a great rapid prototyping environment and ROS 2.0 is moving in the right direction to become more of a drone platform,” says Meier. “However, right now neither we nor Qualcomm or other industry adopters base the PX4 stack on it. In addition to offering ROS, we have a DSP-to-Linux IPC mechanism called muORB for messaging as a lightweight alternative. However, the PX4 middleware has a transparent adapter layer for ROS, though, so people can run our apps in a native ROS environment. Dronecode also has a MAVLink to ROS bridge called mavros.”
Irish Drone Community Gains Spotlight
A major goal of the workshop and Flight Day is to support the emerging UAV industry in Ireland, a country whose rugged coastline and castle-dotted hills have attracted filmmakers using drones. Both events are sponsored by Atlantic Bridge, Irish Development Agency, and Startup Ireland, in addition to 3DR and the Dronecode Foundation.
Ireland has taken an early lead in establishing regulations that legalize safe drone usage. A hobbyist drone community is emerging around organizations like Copter Shop Ireland and the iFly Technology training center. UAV-related companies based in Ireland include Green Aviation, Verifly, and SkyTec Ireland.
“Dronecode provides an ideal collaborative technology platform to foster rapid adoption and growth for the drone industry in Ireland,” says Trishan de Lanerolle, Program Manager for the Dronecode Foundation, as part of the Linux Foundation’s Collaborative Projects team.
At the Flight Day event, several University research groups will be showcasing their projects alongside companies like 3DR and Parrot. De Lanerolle says, “From a regulation point of view the Irish Aviation authority has a progressive approach and wants to promote innovation in this space.”
In the U.S., meanwhile, there’s a growing campaign for self regulation by vendors and users as a means to forestall potentially more restrictive FAA regulations. In a recent Hackaday post, 3DR CEO Chris Anderson notes safety-oriented Dronecode projects including Dronecode No Fly Zones and a related Safe Flight API.
As drone vendors and users come under fire for unsafe flying practices and invasions of privacy, it’s important to note the many benefits of UAV technology, from improved agricultural practices to search and rescue and disaster relief. The Dronecode events will highlight the increasing number of humanitarian projects involving drones, including Uplift Aeronautics and OpenRelief. Other efforts include UAViators, which helps aid organizations safely use drones for relief efforts. Drones are also used by the World Wildlife Foundation to track wildlife and poachers in Africa.
The Drone Developer Workshop ($10) will be held Oct. 5, 2-6pm at the Spencer Hotel in Dublin, Ireland. (bring your own laptop). Flight Day ($10) is scheduled, weather permitting, for Oct. 8, 9am to 4:30pm, with transportation provided to an airfield near Dublin. More information and registration may be found here.
]]>
Originially posted on DiyDrones.com by Andrew Tridgell.
Download at: http://plane.ardupilot.com/
The ArduPilot development team is proud to announce the release of version 3.4.0 of APM:Plane. This is a major release with a lot of changes so please read the notes carefully!
First release with EKF by default
This is the also the first release that enables the EKF (Extended Kalman Filter) for attitude and position estimation by default. This has been in development for a long time, and significantly improves flight performance. You can still disable the EKF if you want to using the AHRS_EKF_USE parameter, but it is strongly recommended that you use the EKF. Note that if an issue is discovered with the EKF in flight it will automatically be disabled and the older DCM system will be used instead. That should be very rare.
In order to use the EKF we need to be a bit more careful about the setup of the aircraft. That is why in the last release we enabled arming and pre-arm checks by default. Please don’t disable the arming checks, they are there for very good reasons.
Last release with APM1/APM2 support
This will be the last major release that supports the old APM1/APM2 AVR based boards. We have finally run out of flash space and memory. In the last few releases we spent quite a bit of time trying to squeeze more and more into the small flash space of the APM1/APM2, but it had to end someday if ArduPilot is to continue to develop. I am open to the idea of someone else volunteering to keep doing development of APM1/APM2 so if you have the skills and inclination do please get in touch. Otherwise I will only do small point release changes for major bugs.
Even to get this release onto the APM1/APM2 we had to make sacrifices in terms of functionality. The APM1/APM2 release is missing quite a few features that are on the Pixhawk and other boards. For example:
- no rangefinder support for landing
- no terrain following
- no EKF support
- no camera control
- no CLI support
- no advanced failsafe support
- no HIL support (sorry!)
- support for far fewer GPS types
that is just the most obvious major features that are missing on APM1/APM2. There are also numerous other smaller things where we need to take shortcuts on the APM1/APM2. Some of these features were
available on older APM1/APM2 releases but needed to be removed to allow us to squeeze the new release onto the board. So if you are happy with a previous release on your APM2 and want a feature that is in that older release and not in this one then perhaps you shouldn’t upgrade.
PID Tuning
While most people are happy with autotune to tune the PIDs for their planes, it is nice also to be able to do fine tuning by hand. This release includes new dataflash and mavlink messages to help with that
tuning. You can now see the individual contributions of the P, I and D components of each PID in the logs, allowing you to get a much better picture of the performance.
A simple application of this new tuning is you can easily see if your trim is off. If the Pitch I term is constantly contributing a signifcant positive factor then you know that ArduPilot is having to
constantly apply up elevator, which means your plane is nose heavy. The same goes for roll, and can also be used to help tune your ground steering.
Vibration Logging
This release includes a lot more options for diagnosing vibration issues. You will notice new VIBRATION messages in MAVLink and VIBE messages in the dataflash logs. Those give you a good idea of your
(unfiltered) vibration levels. For really detailed analysis you can setup your LOG_BITMASK to include raw logging, which gives you every accel and gyro sample on your Pixhawk. You can then do a FFT on the
result and plot the distribution of vibration level with frequency. That is great for finding the cause of vibration issues. Note that you need a very fast microSD card for that to work!
Rudder Disarm
This is the first release that allows you to disarm using the rudder if you want to. It isn’t enabled by default (due to the slight risk of accidentially disarming while doing aerobatics). You can enable it
with the ARMING_RUDDER parameter by setting it to 2. It will only allow you to disarm if the autopilot thinks you are not flying at the time (thanks to the “is_flying” heuristics from Tom Pittenger).
More Sensors
This release includes support for a bunch more sensors. It now supports 3 different interfaces for the LightWare range of Lidars (serial, I2C and analog), and also supports the very nice Septentrio RTK
dual-frequency GPS (the first dual-frequency GPS we have support for). It also supports the new “blue label” Lidar from Pulsed Light (both on I2C and PWM).
For the uBlox GPS, we now have a lot more configurability of the driver, with the ability to set the GNSS mode for different constellations. Also in the uBlox driver we support logging of the raw carrier phase and pseudo range data, which allows for post-flight RTK analysis with raw-capable receivers for really accurate photo missions.
Better Linux support
This release includes a lot of improvements to the Linux based autopilot boards, including the NavIO+, the PXF and ERLE boards and the BBBMini and the new RasPilot board. If you like the idea of flying
with Linux then please try it out!
On-board compass calibrator
We also have a new on-board compass calibrator, which also adds calibration for soft iron effects, allowing for much more accurate compass calibration. Support for starting the compass calibration in the
various ground stations is still under development, but it looks like this will be a big improvement to compass calibration.
Lots of other changes!
The above list is just a taste of the changes that have gone into this release. Thousands of small changes have gone into this release with dozens of people contributing. Many thanks to everyone who helped!
Other key changes include:
- fixed return point on geofence breach
- enable messages for MAVLink gimbal support
- use 64 bit timestamps in dataflash logs
- added realtime PID tuning messages and PID logging
- fixed a failure case for the px4 failsafe mixer
- added DSM binding support on Pixhawk
- added ALTITUDE_WAIT mission command
- added vibration level logging
- ignore low voltage failsafe while disarmed
- added delta velocity and delta angle logging
- fix LOITER_TO_ALT to verify headings towards waypoints within the loiter radius
- allow rudder disarm based on ARMING_RUDDER parameter
- fix default behaviour of flaps
- prevent mode switch changes changing WP tracking
- make TRAINING mode obey stall prevention roll limits
- disable TRIM_RC_AT_START by default
- fixed parameter documentation spelling errors
- send MISSION_ITEM_REACHED messages on waypoint completion
- fixed airspeed handling in SITL simulators
- enable EKF by default on plane
- Improve gyro bias learning rate for plane and rover
- Allow switching primary GPS instance with 1 sat difference
- added NSH over MAVLink support
- added support for mpu9250 on pixhawk and pixhawk2
- Add support for logging ublox RXM-RAWX messages
- lots of updates to improve support for Linux based boards
- added ORGN message in dataflash
- added support for new “blue label” Lidar
- switched to real hdop in uBlox driver
- improved auto-config of uBlox
- raise accel discrepancy arming threshold to 0.75
- improved support for tcp and udp connections on Linux
- switched to delta-velocity and delta-angles in DCM
- improved detection of which accel to use in EKF
- improved auto-detections of flow control on pixhawk UARTs
- Failsafe actions are not executed if already on final approach or land.
- Option to trigger GCS failsafe only in AUTO mode.
- added climb/descend parameter to CONTINUE_AND_CHANGE_ALT
- added HDOP to uavcan GPS driver
- improved sending of autopilot version
- prevent motor startup with bad throttle trim on reboot
- log zero rangefinder distance when unhealthy
- added PRU firmware files for BeagleBoneBlack port
- fix for recent STORM32 gimbal support
- changed sending of STATUSTEXT severity to use correct values
- added new RSSI library with PWM input support
- fixed MAVLink heading report for UAVCAN GPS
- support LightWare I2C rangefinder on Linux
- improved staging of parameters and formats on startup to dataflash
- added new on-board compass calibrator
- improved RCOutput code for NavIO port
- added support for Septentrio GPS receiver
- support DO_MOUNT_CONTROl via command-long interface
- added CAM_RELAY_ON parameter
- moved SKIP_GYRO_CAL functionality to INS_GYR_CAL
- added detection of bad lidar settings for landing
Note that the documentation hasn’t yet caught up with all the changes in this release. We are still working on that, but meanwhile if you see a feature that interests you and it isn’t documented yet then please ask.
]]>The Mission of the Humanitarian UAV Network (UAViators) is to promote and enable the safe, responsible and effective use of UAVs in a wide range of humanitarian and development settings. The Network therefore champions an international code of conduct and organizes 1) Experts Meetings to share lessons learned and best practices; 2) Hands-on UAV Training for humanitarian & development professionals; 3) UAV deployments for humanitarian and development projects; and 4) Carries out applied research to catalyze innovation and learning. The UAViators Advisory Board includes the UN, Red Cross, World Bank, European Commission, OpenAerialMap, 3DRobotics, OpenRelief and a dozen other organizations.
Humanitarian UAV missions differ markedly from commercial applications like precision agriculture. Community engagement is paramount in humanitarian settings; having legal permission to operate from government authorities does not give UAV teams the ethical permission to operate, for example. This explains why the UAViators Code of Conduct includes detailed guidelines on Community Engagement. The Code of Conduct also includes important guidelines on data ethics, which are even more important in humanitarian settings. Hence the Code of Conduct, which was developed in partnership with dozens of humanitarian organizations including the UN and Red Cross.

UAViators is also engaged in operational deployments and applied research. For deployments, UAViators partners with OpenAerialMap to host imagery and teams up with MicroMappers to analyze aerial imagery and videos. MicroMappers is a free and open source platform developed in partnership with the United Nations to crowdsource the analysis of aerial data. In March 2015, the World Bank activated UAViators to spearhead a UAV mission in response to the Category 5 Cyclone that had just devastated the islands of Vanuatu. As part of this humanitarian mission, UAViators deployed MicroMappers to analyze oblique imagery to support the World Bank’s damage assessment efforts. Following the Nepal Earthquakes in April and May 2015, the UN invited UAViators to coordinate 15 UAV teams on the ground.
In terms of research, the Network recently teamed up with the University of Southampton to crowdsource the analysis of aerial videos from UAVs. One of the goals of this research is to provide UAV pilots with near real-time analysis of live video feeds for the purposes of disaster damage assessments. As such, the Humanitarian UAV Network is interested in exploring closer integration between data-centric open source platforms like MicroMappers and open source mission control software. Indeed, the former could provide course corrections if linked to the latter. In addition, UAViators collaborated with key partners to produce the first ever 3D model of a refugee camp in order to assess the added value of 3D for camp management. Finally, the Network is actively engaged in document best practices for UAV missions along with case study analyses of important UAV deployments.
UAViators is especially excited to join Dronecode and to collaborate with other members in order to increase the effective use of UAVs in a wide range of humanitarian and development settings. Open source UAV software is going to be absolutely key to mainstream the use of UAVs in humanitarian and development projects. We thus very much welcome the opportunity to team up with Dronecode members and thereby demonstrate the very real and positive social impact UAVs can have across the planet.
ABOUT THE AUTHOR OF THIS POST
Dr. Patrick Meier is Director of Social Innovation at QCRI and the Founder of the Humanitarian UAV Network. He is an internationally recognized thought leader on humanitarian technology and innovation. His new book, “Digital Humanitarians” has been endorsed by Harvard, MIT, Stanford, Oxford, UN, Red Cross, World Bank, USAID and others. Over the past 12 years, Patrick has worked in the Sudan, Kenya, Ethiopia, Uganda, Somalia, Liberia, India, Timor-Leste, Kyrgyzstan, Turkey, Morocco, Western Sahara, Haiti, Vanuatu and Northern Ireland on a wide range of humanitarian projects with several international organizations including the United Nations and the World Bank. In 2010, he was publicly recognized by Clinton for his pioneering digital humanitarian efforts, which he continues to this day. Patrick’s work has been featured in the New York Times, Washington Post, Wall Street Journal, CNN, BBC News, UK Guardian, The Economist, Forbes & Times Magazines, New Yorker, NPR, Wired, Mashable, TechCrunch, Fast Company, Nature, New Scientist, Scientific American and elsewhere. His influential and widely-read blog iRevolutions has received over 1.5 million hits. He tweets at @patrickmeier.
]]>Stanford University Aerospace Design Labs, OpenTX Project and Humanitarian UAV network (UAViators) have joined the project as Sponsored members. We look forward to working with our members and developer community to improve the Dronecode UAV platform and technology stack.
Come meet us and interact with project leaders at our first European event, co-located with Linux Conn and Embedded linux Conference, in Dublin Ireland. Dronecode will be hosting a developer workshop, that will allow participants to get hands on experience using the Dronecode technology stack. This workshop will be led by Lorenz Meier, PX4 Project lead and Tully Foote Platform Manager for ROS, October 5th, followed by a “Flight Day” on October 8th. This is a companion event for participants to show off their UAV capabilities and flight skills, network with industry insiders, in a safe controlled environment. This event will occur at an airfield in Newcastle, Ireland. We would like to invite you to participate:
Register Today for Dublin, Ireland!
Dronecode project participated in the Interdrone Conference, in Las Vegas last week to overwhelming interest and attention from the InterDrone community. Our sessions were very well attended; not an empty seat in the house! It was exciting to see the range of products and services on offer at the Expo, that were built on the Dronecode stack. I’d like to give a special thanks to our team including Craig Elder, Tom Pittenger and Jamie Machuca for representing Dronecode at Interdrone.

If you are using Dronecode technologies, we’d like to hear from you and would very much appreciate it if you share that fact. Not only will you be helping spread the word, you will be complying with some of the requirements under the open source licenses of the software projects. We would be happy to help you ensure license compliance.
ABOUT THE AUTHOR OF THIS POST

In 2015 Trishan de Lanerolle joined the Linux Foundation’s Collaborative Projects team as Program Manager for the Dronecode Foundation to advance development of Unmanned Aerial Vehicles. de Lanerolle is a technologist with more than a decade of experience, having led the development efforts of several open source software and mobile-based application projects for disaster management and humanitarian response as well as enterprise software applications. He was co-founder and director of the Humanitarian Free and Open Source Software Project (HFOSS) at Trinity College in Hartford, Connecticut, and a founding partner of Nile Point Consulting LLC. He serves on the board of advisers for the Non-Profit FOSS Institute and has a Bachelor of Science degree in Computer Science from Trinity College, and a Master of Science degree in Management of Innovation and Technology from Rensselaer Polytechnic Institute (RPI).
]]>The master-AVR branch has been created. Moving forward all official AVR builds (APM1, APM2, APM2.5) will be done on this branch rather than master. This means that commits done to the master branch will need to be pull across into master-AVR should the feature or bugfix need to be included for APMs as well.
Rover
- Quiet at the moment as we manage the creation of the master-AVR branch and the knock on effects to the automated build and testing systems.
Plane
- TRIMs detection has been disabled on startup as users would often start their vehicles with the sticks not centred and the TRIM would be incorrectly set from that point onwards.
- The Lighware LIDAR is getting support via a driver written by Tridge. Thanks to Lightware for supplying a development device – an SF10/C.
- The Mag calibration code from the Solo is in a PR about to go into Master. This means everyone will get a new improved compass calibration procedure for the vehicles. Its a big patch and been a lot of hard work for all involved.
- Beta testing continues on 3.4
Copter
- Copter-3.3 release testing continues to go well with no crashes or serious issues attributed to the flight code software in over a week. We should move to a soft-launch of AC3.3 for multicopters in about a week. TradHeli will likely be held back by a couple of weeks to resolve an issue discovered with the servos not moving before takeoff.
- Copter precision landing in master for IRLock on Pixhawk. Future planned enhancements to this feature include a tunable response using a velocity controller and the addition of other vision sensor like the PX4Flow sensor.
Trad Heli
- Restructuring of AP_Motors_Heli complete and merged into master which includes basic gas engine support and allows for easier addiition of new frame types, Coaxial, Tandem, Compound, etc
- RPM measuring code added by Tridge
PX4 Middleware
- UAVCAN update
- UAVCAN actuator configuration concept in active discussion. This is required to configure the location of ESCs and their turn direction
- Impending code style enforcement: This will introduce a one-time diff, but will ensure that future code contributions are done in the right format.
PX4 Flight Core
- v1.0.1 release out, users are generally happy. The current release has seen quite intense testing
- SITL support extended from multirotors to planes and VTOL
- Support to trigger a servo through a mission command
UAVCAN
- The specification has been fully reviewed and updated. The website uavcan.org now contains the up-to-date specification, and it is planned to publish the updated tutorials as well in the following few days.
Mission Planner
- Mission Planner now has a better view for EKF and Vibration messages, alerting users to problems before they happen. Mission Planners GeoRef function has been updated to better support the self describing nature of Bin/Log files. This should remove previous errors involved with bad field offsets. PX4Uploader has been modified to prevent several forged certificates that have appeared in the wild.
QGroundControl
-
Mavlink error messages show up at the top of the window in a modeless ui element. This should make people more aware of critical errors coming from the vehicle.
-
You can now reset all parameters to their defaults from the Parameter Editor
-
New Fly View functionality:
-
Shows currently connected vehicles on the map
-
Initial implementation of showing Mission Items
-
-
Working on moving from local TeamCity builds to cloud Travis and AppVeyor
-
Including support for iOS and Android drops
-
The Dronecode Project is proud to present its first developer workshop and flight day in Dublin, Ireland. This event is co-located with the Linux Foundation’s LinuxCon Europe and Embedded Linux Conference Europe.
Register Today
https://www.regonline.com/
Drone Developer Workshop
Monday, October 5th, 2pm-5:30pm.
The Spencer Hotel
Room: Colomba 2
Excise Walk, IFSC
Dublin 1
Dublin, Ireland
This half-day Dronecode
Participants
Flight Day
Thursday, October 8th, 9:30AM -4:30PM.
Newcastle Aerodrome
Sea Road, Newcastle
Co Wicklow
Google Map!
Transportation from Dublin City Centre (pick up at convention centre) will be provided.
Lunch will be provided for registered attendees
(Bus departs at 8:30am)
“Flight Day” is a companion event for participants to show off their UAV capabilities and flight skills, network with industry insiders and apply the knowledge they learned from the Dronecode workshop, in a safe controlled environment. Expect to solve some fun challenges and win prizes. Participants will need to bring their own UAVs, food and beverages will be provided.
Attendance at LinuxCon/ELCE is highly encouraged, but not required in order to attend the Dronecode workshop and Flight day.
The Dronecode workshop and Flight day are supported by 3DRobotics, Atlantic Bridge, Irish Development Agency, Startup Ireland, and the Linux Foundation’s Dronecode Project.
Running September 9-11, 2015, Interdrone in Las Vegas, Nevada, is an international Drone Conference and Exposition. Come meet us and participating member companies during the conference.
Attend our workshop on Wednesday, September 9th (1:15pm – 2:15pm) at Drone TechCon: The Dronecode Project – Commercial Drones and Open Source Autopilots, presented by Craig Elder
Dronecode is an open source, collaborative project that brings together existing and future open-source drone projects under a nonprofit structure governed by The Linux Foundation. The result is a common, shared open-source platform for Unmanned Aerial Vehicles (UAVs). Dronecode provides operators flexibility, reliability, and security at a lower cost point for UAV software and hardware than other closed source options.
This session provides an introduction to the various code bases within the project and will cover examples of how the hardware and software has developed specifically for commercial use. It will also explore future use cases and how companies and users can integrate with their applications.
]]>
Vulture 2 avioncs rig schematic
The mission profile requires some custom parameters for the the Vulture 2’s Pixhawk autopilot, running APM:Plane. Enter Andrew Tridgell, he of 2014 Outback Challenge fame, who’s very kindly being doing the legwork on this part of the project.
Here’s some of what we’ve implemented to date:
- Startup in AUTO mode:
We have added a new ArduPilot INITIAL_MODE parameter for what mode to boot into. For LOHAN it will be AUTO.
- MAV_CMD_NAV_ASCEND_WAIT
Ascend wait will be an AUTO mode command that is used to wait for the Vulture 2 to ascend to the needed altitude, wiggling servos on the way. While ascending the servos will move through their full range every wiggle_time seconds. This is to prevent the servos from freezing solid at temperatures as low as -50 degC. This command will complete when one of the following conditions is met: vehicle is descending at higher than a set speed, vehicle sees an X acceleration above a given threshold (rocket has fired).
- Accel detection
We have a new ACC_HOLD_THRESH parameter in m/s/s. If the X acceleration is ever above that level in AUTO mode then the vehicle will move servos to the trim position and hold them there for ACC_HOLD_TIME seconds (we will use 20 seconds). This parameter will operate whenever in AUTO mode.
- MAV_CMD_NAV_LOITER_DESCEND
The MAV_CMD_NAV_LOITER_DESCEND command will be used during the primary descent of the vehicle after the rocket has fired. It will take a target latitude/longitude a target altitude and a loiter radius. The vehicle will fly towards the target lat/lon then circle at that position until its altitude drops below the given altitude target. At that point the mission will continue.
- Autotune in AUTO mode
We have a new MAV_CMD_DO_ENABLE_AUTOTUNE while will enable autotuning during AUTO flight. This mission command will be just before the LOITER_DESCEND stage of the flight. It will then disable when LOITER_DESCEND has finished. This will allow the aircraft to use automatic PID tuning while descending.
We’ve pretty well wrapped all of the Vulture 2 testing, including sending a full avionics rig to 30,000m to check the servo and battery function, and we’re now just waiting on the FAA to give us the green light for a launch from Spaceport America, New Mexico.
Hopefully, some of the groundbreaking work we’ve been doing will be of future use to people in the Droneshare community, and we’re happy to be contributing to the advancement of open source UAV software.

From L-R, LOHAN team members Drew Cullen, Rob Eastwood, Paul Shackleton, Dave Akerman and Anthony Stirk
Full LOHAN coverage: http://reg.cx/1Uyg
Our last test flight (Codename PRATCHETT): http://reg.cx/2fQj
ABOUT THE AUTHOR OF THIS POST
I’m head of Special Projects for The Register, with a Guinness World Record for the highest launch of a paper plane under my belt. Before turning to tech journalism, I was a cameraman/surveillance photographer for the BBC and other TV outlets, working for Panorama, World in Action and Macintyre Undercover back in the good old days of analogue photography. I once owned a Sinclair ZX81 with 16K RAM module, and have happy memories of BASIC.
]]>We discovered that in Rover we were not reporting on the LiDAR in the SYS_STATUS message. This would cause the GCSs to show the LiDAR as unhealthy or absent in some scenarios.
Plane
The MPU9250 initial driver support has been done and pushed into Master. Most likely nobody will have one of these chips in their autopilot yet HOWEVER the driver for this puts us onto the road for 4kHz sampling which has the potential to greatly reduces the problems relating to vibration.
Development to support version 2 of the PulsedLight LiDARLite (nicknamed bluelabel) is ongoing with a few issues that need to be ironed out. The first version of the driver has been pushed into Master. The expectation is that users will be purchasing these as apparently they resolve some of the I2C issues the first version suffered.
Training mode has been adjusted in Plane. The roll limits now scale with airspeed. In other words if you slow down too much it won’t allow you to turn hard.
Copter
Testing continues on RC8. Number of new issues is extremely low. Need to get RC9 out. It will include improved IMU selection by EKF based on noise.
PX4 Flight Core
More VTOL airframes are supported, now covering various tilt-rotor geometries, duo-rotor and quadrotor tailsitters, plane plus quad combinations and delta wing plus quad. Transitions have been smoothed further and work reliably. The project kicked off last week more coordination on video streaming and has kicked off this week more coordination on marker tracking. If this is of interest to other projects a group on the Dronecode level to discuss this further would make a lot of sense.
Mission Planner
Mission Planner has had a few screens created, for displaying EKF status, Vibration levels, as these are a major statistic for the autopilot health. Log files created with Mission Planner have also been updated to display both the EKF position as well as the GPS position, this allows a comparisons between the two. Work has also been completed on displaying nofly zones, as defined in a KML file, and user definable.
QGroundControl
The overall setup process has been improved considerably over the last months and we released this week a new tutorial video:
https://www.youtube.com/watch?v=91VGmdSlbo4
The video features the complete setup experience for PX4 (as visible in the video APM can be flashed as well) and also shows the new flight mode config which is similar to the concepts used by other projects discussed in the PX4 and APM development communities a few weeks ago.
]]>Rover
The T3 event is drawing to a close. http://diydrones.com/profiles/blogs/t3-back-to-the-future?xg_source=acti…
The reason I mention it is we had a few rover entries with interesting results. Most rover configurations are for slow to medium speeds but the T3 is all about going as fast as possible so the setup and running of those rovers is very interesting and has quite a lot of useful information for other Rover users wishing to do this sort of thing.
Rover has had a few changes recently so we are heading towards a release. To this end we have released a BETA v2.2.51 for those Rover users wishing to help out with testing.
A T3 entrant (Mike aka dr0n3droid) uncovered an issue in Rover which turns out had been identified over a year ago by Mike Roberts and logged as Issue #840 . If your Rover is in AUTO mode and you nudge the throttle up past 50% the Rover will increase in speed. This is a way to run auto missions and test out what speeds it’s best suited for. HOWEVER, it turned out when you put the throttle in reverse over 50% exactly the same thing happened! So users in T3 had a Rover go very fast out of control and they instinctively put it into full reverse which made the situation much worse! This has been resolved and now going into reverse won’t change the speed unless the Rover is driving in reverse.
We also did a search through the outstanding Rover issues in Github to see if there were any other previously logged issues that we can resolve. No bugs were found but a couple of enhancement requests were identified so they have been assigned to the Rover maintainer for review.
Plane
Through the week a clever user named Marc Merlin was having a lot of trouble configuring Flaperons for his Plane. He eventually figured it out and then took the fantastic step of writing up a document on how to do it! This has subsequently been reviewed, edited and tested (yes we test the documentation) and incorporated into the main Plane wiki – thanks Marc!
http://plane.ardupilot.com/wiki/flaperons-on-plane/
Lucas De Marchi has been doing great work on the Inertial Sensors library going through a code review and tidy up.
Tridge has updated the PX4Firmware and PX4NuttX submodules within Ardupilot which is always a time consuming and complex task but does allow Ardupilot to have the latest set of bug fixes and enhancements coming from the PX4 work.
Copter
Copter-3.3 beta testing continues. Major blocking issue is improving the EKF’s resistance to high vibration and dealing with Barometer failures. Paul Riseborough has provided a 2nd potential solution which relies on the inflight vibration monitor. We plan to test this solution this week.
Various small fixes including:
-
- MOT_THR_MIX_MAX parameter added to copter for AC3.3 to allow controlling the attitude vs throttle prioritisation during dynamic flight
- optical flow driver enabled for Linux boards (Victor Mayoral from Erle Robotics)
- Fixed unwanted descent during Spline waypoints if speed too high (Leonard Hall)
- RALLY_INCL_HOME parameter added to allow users to more easily include Home as a safe landing spot when using Rally points (defaults to include home for copter, not included for Plane)
Trad Heli
- PR from fhedberg which creates abstraction layers in the AP_MotorsHeli class, similar to the way multirotors are done. This new architecture will enable creation of new helicopter frame classes, such as tandem and compound helicopters.
- Processing this PR requires completely re-write of heli improvements from last week due to heavy merge conflicts.
- Tridge has create a tachometer sensor class, currently being used to gather data from his gas helicopter engine. Needs more work for filtering, second input for rotor speed, etc.
- Tachometer data will be used for closed loop throttle control.
- Tridge’s helicopter which has very high angular vibrations had revealed a problem with aliasing of the IMU rate data.
PX4 Flight Core
- Fixed wing
- Fixes for TECS initialization in-air, prevents climbs / dives on switch (#2588)
- VTOL
- Support added for quad + plane type airframes, supported airframes now include
- Tailsitters (quad and duo-rotors)
- Tiltrotors (FireFly Y6)
- Quad + plane type airframes
- VTOL architecture rework in RFC stage, comments welcome
- Support added for quad + plane type airframes, supported airframes now include
- Multicopter
- Generics failsafe class evaluating signal quality, timeouts and vibration (#2441)
UAVCAN
- Bootloaders for Zubax GNSS and Ben’s ESC have been prepared, which basically concludes preparation for the release, which is planned for Aug 15 (jointly with PX4)
PX4ESC
- Recent developments have improved stability, including stability on very low RPM: https://www.youtube.com/watch?v=oGGGSI3pNk4
Mission Planner
- Mission planner 1.3.31 was released in the past week which included updates to georeferencing, correct log file creation from rtk gps’s, and updates to support NTRIP data sources for RTK.
QGroundControl
- Release v2.7.1 (download) out
- Support for Firmware update on PX4, APM and SiK radios
- Supported airframes are now loaded dynamically from each .px4 file and the user menu of airframes is populated based on the binary
- Improved Flight Mode config with more intuitive UI
- Firmware upgrade fixes for older boards
- Live H.264 video streaming support
ROS Integration
This update is a little longer than one week.
We’re working toward building a standard abstract interface for commanding aerial vehicles based on ROS messages. The goal is to define some high level modularity points to allow better interoperability. It’s an ongoing discussion a few links can be found.
- The ongoing discussion in ROS-SIG-MAV: https://groups.google.com/forum/#!topic/ros-sig-mav/f12m3mnqYl4
- In testing new message interface: https://github.com/ethz-asl/mav_comm/pull/30
- A standard set of nomenclature for level of autonomy: https://github.com/ethz-asl/mav_comm/pull/25
Related discussions are for a standard way to define some related concepts for aerial vehicles.
- Coordinate frames for outdoor vehicles: https://github.com/ros-infrastructure/rep/pull/103
- Standard battery messages: https://github.com/ros/common_msgs/pull/74
These are ongoing conversations. Please take some time to review them and add comments. Although this is being developed using ROS nomenclature our goal is to define an abstract interface which can be useable with our without ROS.
]]>
Image of AtlantikSolar, copyright AtlanticSolar
AtlantikSolar used a version of the PX4 flight code, which was largely unmodified, except for added support for the vehicle’s special sensors and equipment like the battery charge controller. The estimation and control system is the stock system found in PX4 codebase.
The flight set multiple records including:
- sets a new world record for the longest ever demonstrated continuous flight of all aircrafts below 50kg total mass, and is also the longest-ever continuous flight of a low-altitude long-endurance (LALE) aircraft (the previous record being a 48-hour flight by the 13kg soLong UAV).
- is the second-longest flight ever demonstrated by an Unmanned Aerial Vehicle (behind Airbus Space’s 53kg Zephyr 7)
- is the third-longest flight ever demonstrated by a solar airplane (behind Airbus Space’s 53kg Zephyr 7 and the 2300kg Solar Impulse 2)
- is the fifth-longest flight ever demonstrated by any aircraft (both manned and unmanned).
Drone Software Platform Evolving Quickly, Driving Cutting-Edge Advancements in Vision Processing and Obstacle Avoidance
San Francisco, June 29, 2015 – Dronecode, the nonprofit organization developing a common, shared open source platform for Unmanned Aerial Vehicles (UAVs), today announced six new commercial members and several nonprofit and academic drone projects that are supporting the effort.
New silver members announced today include Arsov RC Technology, Erle Robotics, Event 38 Unmanned Systems, Parrot, Team Black Sheep and Walkera.
New sponsor members include OpenRelief, Open Source Robotics Foundation, The Autonomous Systems, Control, and Optimization Laboratory (ASCO) at Johns Hopkins, Team Tiltrotor and Uplift Aeronautics.
Formed in late 2014, Dronecode brings together existing open source drone projects and assets under one umbrella organization governed by The Linux Foundation. It currently coordinates and prioritizes funding for six initiatives, 28 Dronecode members and more than 1,200 developers who are collaborating on a de facto standard platform for consumer and commercial drone/robotics open projects.
Dronecode’s significant influx of financial and technical support is driving rapid, diverse UAV progress in areas like vision processing, obstacle avoidance, and environmental and situational awareness. While still a nascent market, industry experts estimate that the commercial drone market will reach $1.27 billion by 2020. Backing for Dronecode is taking off as many begin pursuing drones for humanitarian aid, ecological, agriculture, logistics and parcel delivery purposes.
“We’re thrilled to welcome today’s new members and sponsors so soon after forming Dronecode as a neutral, transparent initiative for advancing UVA technology,” said Amanda McPherson, Chief Marketing Officer at The Linux Foundation. “Their participation affirms the collaborative development model, enabling more parties to provide resources and support to the already vibrant drone community. From improving wildlife protection and search and rescue, to 3-D mapping and precision farming, drones can change our world for both goodwill and economic gains.”
More about today’s new silver members:
Arsov RC Technology: designs and manufactures PX4 compatible flight controllers and other electronic accessories used in UAV vehicles.
Erle Robotics: focuses on making Linux-based artificial brains for robots and drones. They also design, construct and deliver different robots based in Linux.
“We are delighted to join the Dronecode Foundation and collaborate pushing forward the next generation of robots and drones. Linux-based, low-cost and affordable robots, together with the creativity and passion of thousands of developers, will lead the next technological revolution,” said Víctor Mayoral Vilches, CTO of Erle Robotics.
Event 38 Unmanned Systems: provides high endurance UAVs, optical sensors and its cloud based Drone Data Management SystemTM designed specifically for aerial photogrammetry and map making. Its UAVs feature easy-to-use autonomous operation, extended flight times, and large payloads for the agriculture and surveying markets around the world.
“We are excited to officially join the Dronecode Foundation and look forward to helping shape the future of open source drone technologies,” said Jeff Taylor, Founder, Event 38 Unmanned Systems Inc.
Parrot: Headquartered in Paris, Parrot creates, develops and markets advanced technology wireless products for consumers and professionals. The company innovates and develops in the civil drones market with leisure quadcopters and solutions for professional use. Parrot continues to expand in the commercial drone market, building out its expertise and focus on three target markets:
- Geographic information systems (GIS) for the environment, mining / quarrying and city planning sectors,
- Surveillance of sensitive areas (warehouses, industrial sites, hypermarkets), protected locations (natural environments) or accident sites (disasters),
- Precision farming, made possible by the combination of drones, sensors and algorithms for conversion into agricultural recommendations.
“The market for consumer-friendly drones is skyrocketing,” said Henri Seydoux, Founder and CEO of Parrot. “Consumers have a strong appetite for UAV novelty; drones that don’t just only fly, but also do amazing videos, jump, skim the ocean and maneuver at night with headlights. Linux and open source are leading the way, and we’re excited to collaborate with other drone companies, universities, and nonprofit organizations to advance the technology even further.”
Team Black Sheep: was founded out of passion for “First Person View” aerial videos broadcasting live from above. Known for trilling YouTube videos shot all over the world, the company sells FPV aircrafts and accessories.
“Consumer drones have fundamentally changed the way we shoot videos and see the earth from above,” said Raphael Pirker, Pilot at TBS Avionics. “We are happy to recognize that open source software has spearheaded the technology and our industry. At TBS, we want to be a part of this development and help shape the way that people use drones in the near future.”
Walkera: a professional aero-model manufacturer based in China with offices in the United States that unifies UAV product research and development, production, marketing, and services. The company also recently introduced the DroneCode APM copter, the QR x350 Premium, the first model of the iUAS 2015 series.
“We believe Dronecode Project is off to a strong start managing, guiding and aligning resources to best advance the drone revolution,” said Lucy Chen, President at Walkera. “It’s providing a clear path for corporate and open source collaboration and innovation, and we’re excited to share our drone expertise with this growing initiative.”
More about today’s new sponsored members:
OpenRelief: provides open, crowd-sourced information solutions for disaster relief, enabling the right aid gets to the right places when needed. OpenRelief uses an open source approach that ensures everyone, anywhere, can access its technology.
Open Source Robotics Foundation: is a nonprofit organization that supports the development, distribution and adoption of open source software for use in robotics research, education and product development.
“By working with Dronecode, we’ll be able to make our tools even more useful for UAV projects,” said Tully Foote, ROS Platform Manager at OSRF. “With demand for ROS and Gazebo in UAV development on the rise, Dronecode and OSRF are natural partners. The alliance will organically stimulate greater sharing of knowledge, tools and capabilities between the general robotics and aerial robotics communities.”
Team Tiltrotor: is an Vertical Take Off and Landing (VTOL) initiative from aerospace engineers Trevor Strand and Mike Remaly to develop APM-powered tiltrotors. Tiltrotors combine the qualities of vertical lift for low speed vertical landings and forward thrust for high speed, long range airplane flight.
“As today’s small, affordable drones progress from toys to tools, the tiltrotor will fill roles that traditional fixed wing and multirotor cannot,” said Team Tiltrotor.
The Autonomous Systems, Control, and Optimization Laboratory (ASCO) at Johns Hopkins: is part of the Laboratory for Computational Sensing and Robotics (LCSR) and is focused on creating robots with unprecedented agility and robustness that can fully exploit their dynamical and sensing abilities to operate in natural environments.
“Robotics is an exciting, fast-growing industry that greatly benefits from working with other engineers, developers and commercial parties to help advance the design and usefulness of such systems as quickly as possible,” said Marin Kobilarov, Assistant Professor in Mechanical Engineering at the Johns Hopkins University. “With so much UAV innovation happening in all corners of the world, Dronecode plays an important role transforming research and ideas into real-world applications.”
Uplift Aeronautics: is a 501(c)3 nonprofit organization with a mission to empower and aid communities through innovative aviation technology. Uplift is run entirely by volunteers who are passionate about helping communities develop sustainable aviation solutions that help address social problems. They have a special interest in reaching inaccessible or hard-to-access populations.
“Uplift Aeronautics has been steadily improving its fixed-wing cargo delivery capabilities,” said Mark Jacobsen, Founder, Uplift Aeronautics. “It recently flew a 130km sortie with its Waliid aircraft, a variant of the X-UAV Talon, delivering a 1kg package by parachute at the 70km point. Uplift also developed and tested a lighting system that can be toggled on and off by the autopilot, which could be useful for covert deliveries of humanitarian supplies in conflict zones. Uplift is also developing a custom MAVProxy module called ‘testpilot’ that automatically generates attractive reports with flight performance tables and plots like power, endurance, and range at various airspeeds. Testpilot can be used to compare different configurations of an aircraft and optimize an aircraft for maximum performance.”
3DRobotics and Yuneec International Co. Ltd. are Platinum, founding members of Dronecode, which includes the APM/ArduPilot open source UAV platform, and PX4, an independent, open-source, open-hardware autopilot project. More than 1,200 developers are working on Dronecode with more than 150 code commits a day on some projects. Under the neutral guidance of Dronecode, other qualified parties and developers are encouraged to participate in the development and direction of the software.
About Dronecode Project
Dronecode Foundation is a nonprofit organization working on a common, shared open source platform for Unmanned Aerial Vehicles (UAVs). Dronecode brings together existing and future open source UAV software projects, including the APM UAV software platform originally developed by 3DRobotics. More than 1,200 developers are working on Dronecode’s six projects focused on maximizing adoption of the project’s cost-effective, reliable and technologically advanced UAV software. A Linux Foundation Collaborative Project, Dronecode is an independently funded software project that harnesses the power of collaborative development to fuel innovation across industries and ecosystems. https://www.dronecode.org
###
The Linux Foundation, Linux Standard Base, MeeGo, Tizen and Yocto Project are trademarks of The Linux Foundation. OpenBEL is a trademark of OpenBEL Consortium. OpenDaylight is a trademark of the OpenDaylight Project, Linux is a trademark of Linus Torvalds.
Media Contact
Sarah Conway
The Linux Foundation
978-578-5300
[email protected]

Photo Credit: by Trevor Strand, Team TiltRotor
Industry-leading organizations and start-ups like Parrot, Walkera, and Team Black Sheep have joined 3DR, Intel, Qualcomm and others to create an industry-standard, shared open source platform for Unmanned Aerial Vehicles (UAVs). Even groups that compete against one another are working together as part of Dronecode. Change is not just coming in the future, it’s taking place now. Think advances in vision processing, obstacle avoidance, and environmental and situational awareness: Dronecode members are delivering on all of these today.
Last fall Dronecode was established as an umbrella organization to allow organizations and developers to collaboratively engage in the development and direction of industry-leading open source flight control software. I was fortunate enough to join Dronecode, which is a Linux Foundation Collaborative Project, as its program manager earlier this year. I’m enjoying the chance to engage with an energetic and vibrant community at the bleeding edge of UAV technology development.
The project launched last fall, and we have sprinting ever since. In an rapidly evolving industry, open source platforms, such as Dronecode, provide a springboard for developing and implementing new and novel ways to use UAVs.
We’re seeing interesting and practical applications of Dronecode technologies, from photography and agriculture to humanitarian aid and search and rescue. Organizations like Uplift Aeronautics and OpenRelief are on the forefront of humanitarian relief, using drones to supply medical supplies in war zones and to provide search and rescue assistance during in the event of earthquakes.
Enthusiast teams, private enterprise and academic collaborators are contributing major R&D advancements with progress in obstacle avoidance, situational awareness and flight controls. Team Tilt Rotor, a pair of aeronautical engineers, for example, designed and built an osprey-style VTOL aircraft in their garage.
Swiss Federal Institute of Technology students continue to enhance obstacle avoidance capabilities in the PX4 flight stack, while a team at ARCOS lab at Johns Hopkins is pushing the boundaries of what’s possible with sophisticated navigation capabilities. All these innovations and more rely on open source Dronecode software and hardware projects.
Dronecode projects are evolving as rapidly as its community too. Dronecode’s developer community has grown from 1200 to more than 2000 contributors, with more than 12,000 commits in the codebase. In the past 30 days, we recorded 180,000 downloads of APM: Copter and Plane code, and more than 300,000 downloads of Ground control stations, while recording data on approximately 12,000-15,0000 flights per day. In late May, the APM project, released version 3.3 of its flight code, and the PX4 project reached a milestone with the first RC candidate for release 1.0.
Several companies have also launched new Dronecode-powered models. 3DRobotics announced Solo in April, which is built on APM 3.3 flight code, and created an SDK toolkit called Dronekit, extending DroneAPI, for developers to build their own Apps. Erle Robotics developed a drone with its own App marketplace, leveraging Ubuntu, APM and ROS. Walkera recently introduced the DroneCode APM copter, the QR x350 Premium, the first model of the iUAS 2015 series. Developers from Qualcomm, Intel, Parrot, Yuneec and many others are actively engaged in the development of the Dronecode technology stack.
We have increased our focus on code quality and defect identification, resolution and flight testing. Recently, we’ve also improved and enhanced Dronecode simulator environments. Our formalized mission of governance and ecosystem development is sure to attract more members and inspire new open source project collaborations. Change is most certainly afoot now, and I’m excited to be a part of the Dronecode community and engage with new collaborators and member organizations. Do you want to be a part of history-in-the-making? Join us today and help shape the world of drones advancing a common, shared open source platform for drones.
ABOUT THE AUTHOR OF THIS POST
In 2015 Trishan de Lanerolle joined the Linux Foundation’s Collaborative Projects team as Program Manager for the Dronecode Foundation to advance development of Unmanned Aerial Vehicles. de Lanerolle is a technologist with more than a decade of experience, having led the development efforts of several open source software and mobile-based application projects for disaster management and humanitarian response as well as enterprise software applications. He was co-founder and director of the Humanitarian Free and Open Source Software Project (HFOSS) at Trinity College in Hartford, Connecticut, and a founding partner of Nile Point Consulting LLC. He serves on the board of advisers for the Non-Profit FOSS Institute and has a Bachelor of Science degree in Computer Science from Trinity College, and a Master of Science degree in Management of Innovation and Technology from Rensselaer Polytechnic Institute (RPI).
]]>Dronecode is an open source, collaborative project that brings together existing and future open-source drone projects under a nonprofit structure governed by The Linux Foundation.
Craig Elder has joined the Linux Foundation as the Community Manager forDronecode after years in various roles in the industry. He will be speaking at the upcoming InterDrone conference about Dronecode so we wanted to reach out and ask him a few questions ahead of the event.
Q. You have had an interesting career working on AUVs and UAVs. Could you tell our readers a bit about your background?
My background Electrical Engineering with a focus in Oceanography. I graduated in 1989 and began working at the Institute of Ocean Sciences in Victoria British Columbia with The Acoustical Oceangraphic Research Group designing sonar systems and remote and autonomous instrumentation. In 1995 I started designing instrumentation to integrate with Remotely Operated Vehicles and progressed to designing better telemetry and control systems and eventually designing entire new vehicles.
Q. Beyond the fact that AUVs are in the water and UAVs are in the air, are their major differences in terms of how people should think of both, especially in terms of operating autonomously as unmanned vehicles?
Using underwater vehicles commercially is a more mature activity than commercial use of unmanned aerial vehicles but working in the air is much easier than working underwater.
Q. I know you will be speaking about Dronecode at the InterDrone conference, could you tell our readers a bit more about Dronecode?
Dronecode was formed in the fall of 2014 to manage the custodianship of the ArduPilot and PX4 Open Source Autopilot projects. We’re expanding to include other projects as well. Dronecode is a forum for collaboration between the projects, the users, and the companies creating and using the technology
Q. An open source approach to drone software and hardware may be what’s needed to really speed up the delivery of applications and custom solutions for unmanned vehicles. Do you have any companies on board with making use of your work at this point?
We have more than 200,000 systems in use around the world right now. Since we are Open Source it is difficult to know exactly who all the users are but we have between 700 and 1000 companies manufacturing vehicles based on this project. We can only speculate about the number of vehicles being used commercially.
Q. As the FAA works to integrate drones into the NAS there is likely to be security and privacy regulations beyond what is in place today. Do you envision drone platforms like DroneCode needing to add software/hardware support to meet these requirements?
The FAA does not regulate privacy. They regulate the airspace the ensure the safety of people using it. We put safety above everything else. We are highly motivated to create safe and reliable systems. In addition, yes, we have the ability to put systems in place to ensure compliance with local regulations.
Q. What should I have asked you about Dronecode that you would like our readers to know more about?
UAV applications and capabilities are advancing at a phenomenal rate and the cost of these systems is decreasing at an equally phenomenal rate largely because of the open source approach that the Dronecode projects have brought to this space in the last few years. The open source projects have vastly outpaced the development of their equivalent closed source systems and consequently we are seeing more and more companies and research institutions joining this collaborative effort. Our intention is for Dronecode to continue to grow that collaborative environment and advance the technology shared among the member companies. There are exciting things to come!
More about InterDrone.
InterDrone, The International Drone Conference and Exposition, September 9-10-11 in Las Vegas, is the first global scale conference for the builders, flyers and buyers of commercial drones. It will feature a two-day technical conference for engineers and software developers, an overlapping conference for commercial drone “buyers and flyers” in more than a dozen vertical market segments, and a drone business conference. 2500+ attendees. Receive a $150 discount off the prevailing rate of the 3 day pass by inserting the code FLYIT or a $25 discount off any expo pass with code EXPO when prompted at www.interdrone.com.
]]>
Erle Robotics is a company based in Spain focused on making Linuxbased artificial brains for robots and drones. Their team has been actively contributing to to the APM autopilot project and their robotic brains include support for it. Besides providing support for APM, Erle Robotics specializes in enhancing the capabilities of its artificial brains and robots by using the Robot Operating System (ROS).
As introduced in Ars Technica by Glyn Moody:
Working in conjunction with the Ubuntu team, the Spanish company Erle Robotics has now brought not only the first drone powered by Ubuntu but a whole new feature to drones: the ability to run special apps. With the €399 ErleCopter Ubuntu Core Special Edition, users can install drone apps—which add new functions and behaviours—using any device with a browser connected to the drone. Programming the drone apps is done through the Robot
Operating System (ROS)—an SDK for robot and drone application development. Víctor Mayoral Vilches, CTO of Erle Robotics, says that ROS is a key breakthrough for robotics and thus drones: “In a few years ROS has changed the robotics field. It has unified universities and industry around the world, enhanced collaboration, sharing of algorithms and reuse of code. A task that traditionally could take months can be developed within days using ROS.” Erle Robotics drones and robots come with ROS preinstalled but in the near future, ROS will delivered in Snappy Ubuntu as an installable framework.
Erle Robotics collaborates with the Open Source Robotics Foundation (OSRF) and Canonical to push robotic and drone apps to the cloud so that everyone can turn their algorithms into living code. We encourage governments and robotic companies to support the work of the OSRF and Dronecode Foundation. There’s a need for a set of standards in this industry and initiatives such as ROS and Dronecode are the future.
Guest Blog post by Victor Mayoral Viches, CTO Erle Robotics
]]>Andrew “Tridge” Tridgell as he provides updates on the progress of Dronecode’s open source software project for commercial drones, and insight into the future of drone development. He also delves into the specific task of running an autopilot directly on a Linux-based platform.

3DRobotics Solo quadcopter is its first Linux-based drone. Image credit: 3D Robotics.
3DRobotics today announced its first Linux-based drone, a Solo quadcopter touted as the first Unmanned Aerial Vehicle (UAV) to support full control of GoPro cameras and deliver live-streaming HD video to mobile devices. The ground controller, as well as the onboard computer connected to the drone’s Pixhawk 2 autopilot, integrates a 1GHz Cortex-A9 computer running Linux. The Solo is available for pre-sale at $1,000, or $1,400 with a GoPro gimbal, with units shipping via 2,000 locations starting May 29.
The Solo’s computers are more powerful than those of 3DR’s usual APM (ArduPilot Mega) open source drone and autopilot kits, which run the Nuttx RTOS on Arduino hardware. The Solo’s onboard “brainstem” autopilot flight computer is closely linked via WiFi to the ground controller’s “frontal cortex” system, “dramatically reducing the likelihood of autopilot system failure during flight,” according to 3DR.
The Linux computers enable greater autonomy and ease of use than earlier 3DR models such as the $750-and-up Iris+ or the newer, $1,350-and-up X8+ octocopter, says 3DR. The Solo can automatically takeoff, return home, and land, among other features.
Wireless video
The Solo is claimed to be the world’s first drone to wirelessly transmit HD video from a GoPro to an iOS or Android device from up to half a mile, which it does with a claimed latency of 180 milliseconds. (According to Engadget, this is actually 720p, rather than 1080p HD.) Industry leader DJI announced a somewhat similar feature last week with its new Phantom 3 drone, which is claimed to zap live

The Solo is claimed to be the world’s first drone to wirelessly transmit HD video from a GoPro to an iOS or Android device from up to half a mile.
HD video to you from up to 1.2 miles (see farther below).
In conjunction with GoPro cameras, the Solo controller lets you start and stop recording video while in flight, as well as easily pre-program aerial camera shots. These so-called Smart Shots routines include a follow-me mode, as well as filming along a virtual track of waypoints. There’s also an orbiting mode that focuses on an object while circumnavigating it, and a selfie establishing shot that backs up and away from you. Some of these features appear to require the $399 GoPro camera gimbal, which keeps the camera image stable with under 0.1 degree pointing accuracy.
The GPS-enabled Solo can fly 25 minutes without a camera or other payload (1,500 grams), or 20 minutes with the GoPro and its gimbal (1,800 g), says 3DR. Its “smart battery” communicates with the device’s computers to warn you when it’s time to head home.
Like the Phantom 3, as well as other consumer drones, the Solo ships with a controller designed to fit an Android or iOS device as a display. The mobile app lets you take still photos, change the FOV and frame rate, and adjust exposure and other settings.
The Solo’s controller features WiFi and a micro-HDMI port, so you can also directly feed live video to a monitor or FPV goggles. A small built-in display is provided, along with dedicated buttons that enable direct hands-on flight when the drone is flying nearby. There’s even a panic button that stops the drone and directs it to hover in midair.
Solo first to run Dronecode via DroneKit SDK
There was little talk of Linux last October when 3DR and the Linux Foundation launched the Dronecode Project as a community project and governance body for APM. The Berkeley, Calif.-based 3DR did say, however, that it was working to port Linux to its open source APM platform. It also announced plans to integrate a Linux-based companion computer for its advanced Iris+ drone using an Intel Atom Edison module.
, or 20 minutes with the GoPro and its gimbal (1,800 g), says 3DR.")
The GPS-enabled Solo can fly 25 minutes without a camera or other payload (1,500 grams), or 20 minutes with the GoPro and its gimbal (1,800 g), says 3DR.
The Solo, however, is a much more ambitious dive into Linux. It’s only the second Linux-on-APM drone we know of after Erle Robotics’ hobbyist Erle-Copter. Other
Linux-based quadcopters include the slightly lower end Parrot BeBop.
With the help of Dronecode, and 3DR’s DIY Drones community, the company has for several years offered open source hardware and software UAV autopilot designs to the
hobbyist community. Like 3DR’s commercially sold Iris+ and x8+, however, it appears that access to parts of the Solo will be opened only to selected developers.
The Solo runs apps developed with a recently released, open source DroneKit SDK and web API, backed by the Dronecode Foundation. A “Made for Solo” development
program, meanwhile, is “aimed at enabling small companies with great ideas to work directly with us and our manufacturing partners on developing and launching
fantastic new accessories,” says 3DR.
It’s unclear how deeply 3DR will open the Solo hardware, and to whom exactly. So far, the company has yet to reveal many detailed specs. Yet, the design is clearly
designed to be expandable.
The quadcopter integrates a gimbal bay, an accessory bay, and “easy-to-swap motor pods with integrated speed controllers,” says 3DR. The gimbal bay will be enable manufacturers to create plug-and-play gimbals or imaging devices as an alternative to GoPro, complete with “HD feed to Solo’s mobile app, full camera control, and even access to Solo’s computing power,” says the company.
The accessory bay will be similarly opened to gizmos like optical flow indoor flight stabilizers, ballistic parachute systems, and LED lighting system. The swappable motor pods will eventually support upgraded propulsion systems, says 3DR.
Phantom 3 pushes to 4K
Even if the Solo is not entirely open source, it’s almost certainly more accessible than the Phantom 3. DJI’s latest quadcopter will ship with an SDK for mobile app development, but it’s otherwise a very proprietary platform.
I was intrigued by several reports from hackers that have claimed the Phantom 2 is based on OpenWRT Linux. (Examples can be found here, here, here, and here.) However, when I asked DJI Creative Director Sheldon Schwartz last week at the Phantom 3 launch event in New York, he said there was no Linux in the Phantom 3 or controller.
Whatever is under the hood of the Phantom 3, it will be tough for 3DR’s Solo to beat. Even if you already own a GoPro, the Phantom 3 is cheaper, since it ships with a built in camera and s gimbal for $999. A $1,259 Pro version gives you a 4K camera. In addition to the HD video transmission feature, the Phantom 3 also introduced a vision positioning system that can help the quadcopter navigate in areas with poor GPS reception.
On the other hand, Phantom 3 doesn’t have anything quite like Smart Shots, such as waypoint or follow-me modes. According to a favorable hands-on story about the Solo by The Verge, the Solo was largely shaped by DJI expat Colin Guinn, now Chief Revenue Officer at 3DR.
To give it a boost in its battle with the Phantom, 3DR is offering a 30-day money-back guarantee, as well as a free replacement if Solo breaks in flight. Meanwhile, the future looks bright for both products. In the U.S., the FAA continues to expand exemptions on commercial use, and last week, it allowed Amazon to test its promised delivery drones.
]]>

Wednesday was the big ‘unconference’ day for DroneCode. There were a number of presentations on all things related to DroneCode. Please click on the links to see the slides for the individual presentations.


- IMU Temperature Compensation – Hessel van der Molen
- Temperature compensation goals
- Calibration procedure
- PX4 VTOL Vector Control – Roman Bapst
- VTOL support in PX4 native
- High-level overview of the benefits of the new controller (submitted to IROS 2015)
- Current simulation capabilities
- System identification and infrastructure (wind tunnels)
- UAVCAN – Pavel Kirienko
- PX4 ESC codebase
- ESC developments and test state
- Future convergence of the individual CAN node codebases
- The onboard distributed system with all actuators and sensors on the same bus
- Automated 3D SITL with 3D Physics Thomas Gubler and Andreas Antener
- Simulating PX4 with ROS Gazebo – Thomas Gubler
- PX4 SITL testing – Andreas Antener.pdf
- Additional capabilities of the 3D physics simulator over standard flight simulators
- Headless and interactive benefits
- Logging and post-flight analysis
- IMU experiments and filtering strategy – Jonathan Challinger
- IMU sampling strategy
- API for accessing raw samples from PX4 IMU sensor drivers
- handling of delta angles and delta velocities
- use of filtered and unfiltered data in EKF
- IMU temperature calibration
- libraries/AP_InertialSensor/examples/coning.py
- EKF developments – Paul Riseborough
- fusing of optical flow and rangefinder data
- handling of GPS and non-GPS operation transition
- handling of height above ground estimates
- special cases for landing and takeoff
- Ardupilot VTOL – Trevor Strand and Mike Remaly
- Tiltrotor Fundamentals
- Combining The Strengths of “ArduPilot”
- Tiltrotor Challenges
- Testing
- Tiltrotor Road Map
- Travis, Jenkins and Hans – Lorenz Meier
- Travis unit testing and general CI
- Jenkins automated SITL testing with environment / physics / simulated camera views
- Hans – automated on-hardware testing
- ROS and Gazebo – Tully Foote
- ROS in general
- ROS on drones
- existing ROS use cases
- DroneAPI Structure and Usage – Kevin Hester
- structure of DroneAPI
- language bindings
- ROS vs DroneAPI – when to use them?
- licensing of core components
- future steps: stats, gcs df upload, px4 support, mavlink evolution

On March 28-29, 2015, Uplift Aeronautics trained a group of Arab-Americans–including refugees from the conflicts in Iraq and Syria–to operate a fleet of four Waliid UAVs for medical deliveries to inaccessible populations. Families took part in every activity, from packing cargo and making parachutes to running preflight checklists and operating ground stations.
Mark Jacobsen is the founder and Executive Director of Uplift Aeronautics.
In March of 2014 I found myself on the Turkish-Syrian border, doing research among Syrian refugees. The stories I heard were horrific. Mass sieges were in effect; the Syrian government and brutal militias were starving out entire neighborhoods, and the government appeared to be deliberately targeting hospitals and doctors. Smuggling medical supplies into opposition-held areas was punishable by torture and death. Syrians were besides themselves, trying to find some way to get food and medicine into these besieged areas. They asked me why the US did nothing.
As a US Air Force C-17 cargo pilot, this is something I know about. The stark reality is that manned cargo airplanes cannot enter contested airspace without being shot down. After hearing these stories, that wasn’t good enough for me. I thought: surely in the 21st century, there must be some way to get at least some aid through. It seemed that micro-UAVs and swarming technology might hold the key. No single airplane could carry much, but if a launch crew could dispatch a plane every five minutes carrying 2 kilograms, that would be 192 kg (420 pounds) per night… per launch crew. The planes would be small, cheap, quiet, difficult to detect, and inefficient to shoot down.
We formed a group called the Syria Airlift Project to develop and implement the concept. Later, this grew into a broader nonprofit corporation called Uplift Aeronautics with a mission to “empower and aid communities through innovative aviation technology.” We currently have the ability to deliver 1 kg packages at a range of 30 kilometers and then return, and are working on a larger plane capable of delivering 2 kg packages at a range of 50 km, which is enough to reach Aleppo from Turkey. We would launch and recovery from Turkey and airdrop via parachute inside Syria, to recipients identified by experienced medical NGOs.
Our airlift paradigm is labor intensive, which is why we looked to nonviolent, mass-participation campaigns like Gandhi’s homespun cloth effort. More than 3 million Syrian refugees are scattered throughout neighboring countries. Many can’t work and are suffering from the boredom and humiliation of unemployment. After four years of barbaric war with no end in sight, they have little hope and their spirits are broken. With the Syria Airlift Project, we could give them something to believe in and give them direct roles in bringing healing back to their country.
The security challenges of a project like this are extraordinary, which is why we turned to Dronecode technology. In a nutshell, we need to make our planes very easy for the good guys to operate and very hard for everyone else. With open-source software like APM:Plane, we could build custom security features right into our firmware. Our custom firmware recognizes when planes are entering Syria and arms custom failsafes. If a plane thinks a crash inside Syria is imminent, it triggers a mechanism that physically damages the autopilot, ensuring it can’t be reused by malicious actors. We are also working on hard-coding no-fly zones around major airports, looking at the use of cryptographic keys and other security features to control access, and experimenting with the 3DR Pixhawk and APM:Plane advanced navigation solutions to ensure continued operation in GPS denied environments.
If the open source technology is valuable to us, Dronecode’s open source community is even more valuable. We built Uplift Aeronautics as a nonprofit because we want to leverage the incredible talent in the developer and maker communities for humanitarian good. We enjoyed meeting much of this community at the Embedded Linux/Dronecode conference in March 2015, and are finding no shortage of help.
This is an extremely ambitious project with immense technological, political, and legal challenges, but we are committed to carrying forward in a safe, responsible, and legal way. Our ultimate goal is to make sieges impossible, and to help shape a world where starvation and medical deprivation are no longer effective as weapons. UAV technology opens up new frontiers for delivering humanitarian aid, and the open-source Dronecode community is uniquely positioned to create solutions.
Written by Mark Jacobsen and originally published on Linux.com
]]>- Date: Thursday, March 26, 2015
- Venue: Embedded Linux Conference
- Location: San Jose, CA
- URL: https://plus.google.com/b/102964513975937994295/events/cabo3lj9u6ets1tg30l5luldb…
Dronecode Foundation Meetings @ Embedded Linux Conference
March 23 – 25th, 2015
Registration: Closed.
The Dronecode Foundation meetings will be held in conjunction with the 2015 Embedded Linux Conference (ELC). ELC is the premier vendor-neutral technical conference for companies and developers using Linux in embedded products. This conference, now in its 11th year, has the largest collection of sessions dedicated exclusively to embedded Linux and embedded Linux developers. In 2015, the theme of the event is ‘Drones, Things and Automobiles’, with tracks on Automotive Linux, IoT and Drones.
Wednesday March 25th, is the ‘unconference’ day for DroneCode. We will have a room all day for talks and discussions on all things related to DroneCode. To anchor the discussions we will have a set of short talks by members of the development community. These talks will act as an introduction to round table discussion topics.
You can participate in the unconference either by being there in person (if you are going to ELC) or by joining the discussions on mumble. We will use the DroneCode channel in mumble. There will be a microphone in the room and we will also be live streaming via hangouts on air. To actively participate in the discussions you should join the mumble channel. Please be careful to mute yourself when not speaking.
For the complete “Unconference” Agenda visit:
https://docs.google.com/document/d/1QuDinYJOhsvKcS7XseBNdcRmu9kM6FsC6S3M82nx7d4/edit?usp=sharing
Agenda:
Monday March 23rd 2015 Location: Blossom Hill 3
(Member representatives & invitees)
8:00 am. – 9:00 am. Checkin at ELC registration desk and Light Breakfast
9:00 am. – 10:00 am. Welcome followed by address by Chris
Anderson, Chair Dronecode and CEO 3D Robotics.
10:00 am. – 10:30 am. Coffee Break and Networking session
10:30 am. – 11:00 am. ArduPilot Overview by Andrew “Tridge” Tridgell
11:00 am. – 11:30 am. PX4 & Pixhawk Overview by Lorenz Meier
11:30 am. – 12:30 pm. Open Discussion
Board Meeting — Monday 23rd (afternoon) Location: Blossom Hill 3
(Board members only)
Tuesday March 24th 2015 – BoF Location: Willow Glen 2/3
(open to the ELC participants)
9:00 am – 5:00 pm. Dronecode and Drone related ELC talks throughout the day.
6:30 pm – 8:00 pm. Dronecode Birds of a Feather Session
- ELC Reception stations will be open during Bird of a Feather sessions
Wednesday March 25th 2015 – TSC Location: Blossom Hill 3
(open to the community)
Dronecode Technical Team “Unconference” and Steering Committee meeting
8:00 – 9:00 am. Breakfast
9:00 – 10:00 am. Welcome and Introductions
10:00 – 10:30 am. Break
10:30 – 12:00 pm. Breakout sessions and scheduled lightning talks
- Technical project updates from development efforts.
12:35 – 2:00 pm. Lunch
2:00 – 4:00 pm. Breakout sessions and discussions.
]]>
- Keynote – Chris Anderson
- Alignment on 2015 roadmap
- 2. Clarity about what we want from the members
- 3. Clarity about division of labor between companies and community
- 4. Improved “Architecture of Participation”
- 5. Plan for outreach to potential partners/communities
- ArduPilot Overview – Andrew Tridgell
- PX4 Overview – Lorenz Meier
Drone related ELCConference Summary 23-25Mar2015
- Ardupilot and Linux – presented at ELC – Andrew Tridgell
- Qualcomm and PX4 -Mark Charlesbois
- Edison Takes Flight – Joel B. Rosenzweig Mark F. Brown
- Open Sourcing Humanitarian Airlift – Mark Jacobson and Jessie Mooberry
- Flying Penguins – Clay McClure.pdf
- Embedded Linux applications for autonomous UAVs
6. Application of Data Fusion to Aerial Robotics – Paul Riseborough
]]>Chris Anderson, CEO of 3D Robotics believes drones are at a critical stage in their development, not unlike the early days of the internet. In his grand keynote at InterDrone Las Vegas, he explains how drones are finally coming to the people, and they will be the ones to transform with thousands of new use cases we can only imagine.
Lorenz – PX4 Native Stack
PX4 Native pursuing 2 main goals
1. Implementation of slightly modernised CPP API for inter-process
ORB. The intent is to have a scalable API on all platforms
2. ROS in the background to enable the Linux port by using the Pixhawk
as a sensor platform. Communicating between the Linux board and
Pixhawk via a fast UART.
PX4 Native stack also includes new support for VTOL.
Tridge – ArduPilot
ArduPilot rapid development. Copter and Plane releases coming out and
Rover soon.
Changes integrating Optical flow especially with EKF. Changes to have
it operate robustly for non GPS or Indoor environments. Spear headed
by Paul Riseborough.
Effort under way to support tilt rotors. We don’t have a tilt rotor
simulation at the moment and it would be great to have tilt rotor
simulation – it would make development of tilt rotors better.
Integrating UAVCAN support.
Linux ports are getting a large amount of focus. There are a number
of boards that are now supported.
Securing of Telemetry Links
A nicely worked out RFC.
Currently we have no tamper prevention and that is a huge concern. We
want to prevent data injection and reply attacks. Whether the link
needs to be encrypted is a completely different discussion.
The current RFC isn’t quite up to date. It doesn’t encompass new
developments like mavlink routing.
With regard to reply attacks we need a sequence number and the ability
to cope with lost packets. If a lower sequence number the packet is
rejected. Problems still exist with replays between flights. There
are still details to resolve in the RFC.
Can we just encrypt at the radio level – XTea Encryption Algorithm
(https://github.com/tridge/SiK/tree/xtea-wip)
has been tried but the CPU on the radio’s isn’t powerful enough to do
this. To this end we may need to develop a new radio that is both
cheap but powerful enough to support encryption like the SDM32.
Call for people who are interested in getting the Radio encryption up
and running. Linus Casassa expressed interest.
UAVCAN
In PX4Native there is a baseline implementation in place thanks to Pavel’s efforts.
He has designed firmware.
He has designed GPS module with onboard Baro and Mag.
In ArduPilot the code has been available for a couple of months. The
big thing missing is ease of configuration. Currently you need to
connect a debug console to each ESC and configure it that way. UAVCAN
has good building blocks for making configuration easier.
NSH level commands to be implemented as the next step.
MAVLink Consolidation
Defer to next meeting with the suggestion that everybody reads the WIP
documented – link in the meeting agenda.
Progress towards automated hardware testing
python scripts to automatic test ArduPilot in SITL.
We haven’t had automated hardware testing. PX4Native have setup a web
cam viewing a Pixhawk. There is a bunch of Ruby scripts that
co-ordinate builds of the firmware, flashes it and records the NSH
output.
It will be extended to run a long term soak test
The code is all online and linked on the ArduPilot website.
Jani expressed interested in setting this up for ArduPilot.
Merging of upstream PX4 changes
Lots of work going on merging Greg Nutt upstream tree to the lower
trees for PX4Native and ArduPilot.
David Sidrane has resolved some tricky long standing issues.
Changes that have been made can be found in the agenda (link at the top).
Post crash analysis is going to be improved by sufficient state being
saved when there is a problem so more detailed post crash analysis can
be done.
If anyone has an feature requests for PX4 Nuttx layer please add it to
the issues list
https://github.com/PX4/NuttX/issues
Plans for the upcoming ELC
Highlighting there will be a number of drone talks at the conference.
Updates on Linux ports of DroneCode flight stack
Defer details to next meeting. Summary below:
Link to https://dronecode.org and Tridge’s talk on flying with Linux.
PX4Native – focus on interfacing the existing flight stack and the
higher level software pieces that are more useful to run on Linux.
Comments from the floor
Going to create a dronecode organisation on github with one
repository. This will enable us to have a gitter channel for
discussions and repository for meeting notes.
Andrew Tridgell formely of SAMBA fame has now turned his talents to Drones and is a core developer of ArduPilot and the maintainer of APM:Plane. His blog can be found at:
The talk covered the progress of Linux based autopilots for UAV’s over the last year and included a live demonstration of a UAV flying in Canberra/Australia! The UAV had a Beagle Bone Black (BBB) which is a Linux based single board computer partnered with with a PXF cape containing all the sensors for an auto pilot. Not only did the BBB fly the plane but at the same time compiled the Linux kernel!
]]>- Date: Monday, October 13, 2014 to Wednesday, October 15, 2014
- Venue: Congress Centre Düsseldorf
- Location: Düsseldorf
- Country: Germany
For me personally, this is the culmination of a half-lifetime of work on open innovation and in particular a seven-year journey in drones that started with my children and me experimenting with Lego Mindstorms robotics parts and RC airplanes back in early 2007 (I love that first video we shot, shaky as it was; it was a life-changing moment).
I was amazed by what was possible with sensors, embedded microprocessors and GPS, but knew nothing about drones. So I set up a community called DIY Drones, mostly to “ask dumb questions in public”. Two wonderful things happened as a result. First, lots of people generously answered my dumb questions and helped me learn about all the disciplines that come together in aerial robotics, from software and electronics to aerodynamics and data analysis. Second, the existence of this community created a place for other people to ask their own questions, and in those early days of amateur UAVs, everyone was learning as we went. Even the experts in one domain had to learn about the others that had to come together to take robots into the air.
The DIY Drones site quickly grew, and is now one of the largest robotics communities in the world (nearly 60,000 active members and as much as 2 million page views per month). But it wasn’t just talk: members were collaborating on electronics, software and aircraft designs, first informally and then increasingly in organized open source projects, including the APM/ArduPilot platform (including ArduCopter, ArduPlane, ArduRover), Mission Planner, DroidPlanner and countless others, from radio/telemetry to video. Many of these stood on the shoulders of other open source innovation projects, especially the Arduino open computing platform, which gave many of these projects the “Ardu” prefix.
At the same time, leaders in the academic robotics world were also embracing open innovation, and we soon found a kindred spirit in Lorenz Meier from ETH in Zurich, one of the best robotics research institutions, and the PX4 and MAVlink projects that he leads. Soon we joined forces, and today the Pixhawk autopilot platform represents the fruits of that collaboration, a joint effort of an open source community, a premier academic institution and a Silicon Valley company (3D Robotics, which I co-founded in 2009 with Jordi Munoz, who I met through DIY Drones.)
Today, I’m proud that this platform has been adopted by more than 100,000 users and is helping bring advanced UAV technology to regular people, allowing them to do extraordinary things from Hollywood-quality aerial video to crop-mapping, 3D-scanning of buildings. It’s a classic example of the power of democratizing a technology; we are entering the consumer and commercial drone age and I’m delighted that an open source platform is helping lead the way.
Now that we have reached this level of adoption and maturity, it’s time to adopt the best practices of other highly successful open source projects, including professional management and governance structures, to ensure the continued growth and independence of these efforts. There is no better organization to lead this than the Linux Foundation. Not just because of the extraordinary success of Linux itself, but also because of all the other collaborative projects that it helps run, allowing each to reach the next level of participation, performance and innovation. The combination of independence and a clear path for corporate participation and adoption while protecting open source ideals is something these projects have always been built on, and the experience and reputation of the Linux Foundation ensures that those values will be embraced and preserved in our own projects as the industry around them grows.
The creation of a formal non-profit organization to organize, lead and coordinate these projects also makes it easier for companies who want to embrace open innovation in their own UAV and robotics efforts. This allows them to participate in a more formal way that helps ensure that they can contribute back to the community, in everything from code to people power to financial resources. So I’m particularly delighted to welcome our company launch partners, including such giants as Intel, Qualcomm, Box and Baidu in addition to UAV leaders such as Yuneec, Walkera and my own 3D Robotics.
Why now? Not just because drones are hot and open innovation is hotter  Most of all, it’s because as our platforms have matured, they are increasingly heading in the same direction as Linux itself. The extraordinary improvements in mobile hardware technology (thanks Intel and Qualcomm!) and cloud technology (thanks Box and Baidu!), means that our community and software is increasingly running on gigahertz-class Linux computers and with constant broadband connections to the cloud. That means that the opportunity for us to join forces with the broader Linux and Embedded Linux communities is now, and the Linux Foundation is the perfect place to lead that convergence.
Most of all, it’s because as our platforms have matured, they are increasingly heading in the same direction as Linux itself. The extraordinary improvements in mobile hardware technology (thanks Intel and Qualcomm!) and cloud technology (thanks Box and Baidu!), means that our community and software is increasingly running on gigahertz-class Linux computers and with constant broadband connections to the cloud. That means that the opportunity for us to join forces with the broader Linux and Embedded Linux communities is now, and the Linux Foundation is the perfect place to lead that convergence.
Welcome to Dronecode. I can’t wait to see what this community creates next.
ABOUT THE AUTHOR OF THIS POST

I’m the CEO of 3D Robotics and founder of DIY Drones. From 2001 through 2012 I was the Editor in Chief of Wired Magazine. Before Wired I was with The Economist for seven years in London, Hong Kong and New York. I’m the author of the New York Times bestselling books The Long Tail and Free as well as the new Makers: The New Industrial Revolution. Awards include: Editor of the Year by Ad Age (2005). Named to the “Time 100,” the newsmagazine’s list of the 100 most influential people in the world (2007). Loeb Award for Business Book of the Year (2007). Wired named Magazine of the Decade by AdWeek for my tenure (2009). Time Magazine’s Tech 40 — The Most Influential Minds In Technolgy (2013). Foreign Policy Magazine’s Top 100 Global Thinkers (2013). I founded GeekDad, BookTour and a few other companies now lost in the mists of time. My background is in science, starting with studying physics and doing research at Los Alamos and culminating in six years at the two leading scientific journals, Nature and Science. In my misspent youth (more of my twenties than I should admit) I was a bit player in the DC punk scene and amusingly, a band called REM. You can read more about that here. I live in Berkeley, California with my wife and five children.
]]>DUSSELDORF, Germany {EMBEDDED LINUX CONFERENCE EUROPE} October 13, 2014 – The Linux Foundation, the nonprofit organization dedicated to accelerating the growth of Linux and collaborative development, today announced the founding of the Dronecode Project. The Project will bring together existing open source drone projects and assets under a nonprofit structure governed by The Linux Foundation. The result will be a common, shared open source platform for Unmanned Aerial Vehicles (UAVs).
Founding members include 3D Robotics, Baidu, Box, DroneDeploy, Intel, jDrones, Laser Navigation, Qualcomm, SkyWard, Squadrone System, Walkera and Yuneec. Dronecode includes the APM/ArduPilot UAV software platform and associated code, which until now has been hosted by 3D Robotics, a world leader in advanced UAV autopilot and autonomous vehicle control. The company was co-founded by Chris Anderson, formerly editor-in-chief of Wired and the author of the bestselling books “The Long Tail,” “Free” and “Makers: The New Industrial Revolution.” The Dronecode project will also incorporate the partner PX4 project, led by Lorenz Meier from ETH, the Technical University of Zurich.
More than 1,200 developers are working on Dronecode with more than 150 code commits a day on some projects. Examples of projects include APM/ArduPilot, Mission Planner, MAVLink and DroidPlanner. The platform has been adopted by many of the organizations on the forefront of drone technology, including Skycatch, DroneDeploy, HobbyKing, Horizon Ag, PrecisionHawk, Agribotix, and Walkera, among others.
Andrew Tridgell (“Tridge”) will become the chair of the Dronecode Project’s Technical Steering Committee (TSC) and have a seat on the board. He is a lead maintainer in the development of APM/ArudPilot and is well recognized for his contributions to the open source software community, including his work as the author of the Samba file server.
“Open source software and collaborative development are advancing technologies in the hottest, most cutting-edge areas. The Dronecode Project is a perfect example of this,” said Jim Zemlin, executive director at The Linux Foundation. “By becoming a Linux Foundation Collaborative Project, the Dronecode community will receive the support required of a massive project right at its moment of breakthrough. The result will be even greater innovation and a common platform for drone and robotics open source projects.”
The Dronecode Project will help meet the needs of the growing community with a neutral governance structure and coordination of funding for resources and tools the community needs. The governance structure will allow other parties and developers to influence and participate in the development and direction of the software. The Dronecode board will be comprised of members and technical community members. The Technical Steering committee will be composed of project leads and maintainers from top-level projects. Committers can be elected to participate on the TSC.
The development of drones has drastically increased over just the last couple of years due to the vibrant maker community and the use of drones in a variety of new applications. The Teal Group, an aerospace market research firm, recently estimated that within a decade the total amount spent worldwide on research, development, testing and evaluation of drone technology will reach $91 billion. From environmental research to wildlife conservation and search and rescue, drones are becoming recognized for a wide variety of uses beyond commercial and defense applications. Furthermore, the opportunities drones provide for data analysis, storage and display open up a world of possibilities for application in business. Hundreds of thousands of developers and makers around the world today are contributing to drone technology and this future. The Dronecode Project will help advance these technologies and accelerate adoption of better, more affordable and more reliable open source software for UAVs.
The Dronecode Project is a Linux Foundation Collaborative Project. Collaborative Projects are independently funded software projects that harness the power of collaborative development to fuel innovation across industries and ecosystems. By spreading the collaborative DNA of the largest collaborative software development project in history, The Linux Foundation provides the essential collaborative and organizational framework so project hosts can focus on innovation and results. Linux Foundation Collaborative Projects span the enterprise, mobile, embedded and life sciences markets and are backed by many of the largest names in technology. For more information about Linux Foundation Collaborative Projects, please visit: http://collabprojects.linuxfoundation.org. To learn more about Dronecode Project and to start contributing today, please visit: https://www.dronecode.org/.
Comments from Members:
3D Robotics
“The Linux Foundation is well-recognized for its ability to rally support and advance the work of important open source projects,” said Chris Anderson, CEO and founder, 3D Robotics. “The Dronecode Project will benefit from this expertise and bring to bear important resources for developers working on drone technology.”
Baidu
“Dronecode Project will significantly speed up the work being done today to make drones available for more and more applications, from commercial uses to sustainability applications,” said Kai Yu, Head of Baidu IDL (Institute of Deep Learning). “We’re very excited to join this effort and contribute our knowledge to this important work.”
Box
“Across construction, agriculture, and energy, drones are generating massive increases in digital data and content that needs to be stored, shared, processed in the cloud securely,” said Aaron Levie, co-founder and CEO of Box. “Box is thrilled to support the Dronecode Project to power an open platform that will transform how individuals and businesses leverage drones across a number of industries.”
DroneDeploy
“DroneDeploy is enabling businesses to deploy fleets of drones to capture and analyze aerial data in real-time,” said Mike Winn, CEO, DroneDeploy. “It’s through the work of the open source community that projects like ours are possible. The Dronecode Project will accelerate this technology innovation, and we are thrilled to be a part of it.”
Intel
“The industry is just beginning to realize the potential of drone technology as this space continues to attract attention,” said Imad Sousou, vice president and general manager, Open Source Technology Center, Intel Corporation. “For any new technology to become mainstream, it’s important for the industry players to collaborate. Open source contributions to the Dronecode Project can help accelerate innovation in a new market such as this.”
jDrones
“As one the original ArduCopter/APM developers, DroneCode Project is a great way to boost UAV development even further,” said Jani Hirvinen, CEO, jDrones, “We are excited to be a member of this open source community and look forward to continue contributing to the project we love.”
Laser Navigation, owner of VirtualRobotix brand
“The Dronecode project will allow VirtualRobotix and its peers to make core technology advancements much more quickly,” said Roberto Navoni, CEO, VirtualRobotix. “As an early founder of APM Copter project, our company developed the first porting code to 32-bit hardware platform. We’re proud to be a participant in this work, as we know it will the foundation for the future of drone innovation.”
Qualcomm Technologies, Inc.
“The scale and pace of mobile technology development is having a growing impact on many technology areas, drones are no exception,” said Matt Grob, CTO, Qualcomm Technologies, Inc. “The possibilities around drone technology are exciting and Qualcomm has found success in and supports community driven platforms as a way to accelerate innovation in pioneering areas such as drones, robotics and IOT.”
SkyWard
“Commercial drone operators need reliable, effective technologies and infrastructure to support their work,” said Jonathan Evans, CEO, SkyWard. “Open source projects serve to cultivate an ecosystem of collaborative intelligence at a global scale and are the foundation for enabling the Aerial Robotics Network.”
Squadrone System
“The applications for drones are endless. We see customers using drones to capture extreme footage and Hollywood-style aerial video using complete autonomous system,” said Antoine LEVEL, CEO and co-founder Squadrone System.”
Walkera
“Bringing together the technologies, individuals and companies that are driving innovation in drones is an important step towards the future,” said Robert Luo, managing director, Walkera iUAS. “The Linux Foundation is a natural organization to do this, and we are confident Dronecode Project will lead to more advancements and applications for drones.”
Yuneec
“Software is what makes drones intelligent. We want to contribute to that intelligence and the advancement of drone technologies, and the Dronecode Project gives us that opportunity,” said Tian Yu, President and founder of Yuneec.”
About The Linux Foundation
The Linux Foundation is a nonprofit consortium dedicated to fostering the growth of Linux and collaborative software development. Founded in 2000, the organization sponsors the work of Linux creator Linus Torvalds and promotes, protects and advances the Linux operating system and collaborative software development by marshaling the resources of its members and the open source community. The Linux Foundation provides a neutral forum for collaboration and education by hosting Collaborative Projects, Linux conferences, including LinuxCon and generating original research and content that advances the understanding of Linux and collaborative software development. More information can be found at http://www.linuxfoundation.org.
The Linux Foundation, Linux Standard Base, MeeGo, Tizen and Yocto Project are trademarks of The Linux Foundation. OpenBEL is a trademark of OpenBEL Consortium. OpenDaylight is a trademark of the OpenDaylight Project, Linux is a trademark of Linus Torvalds.
# # #
Media Contact:
Jennifer Cloer
The Linux Foundation
503-867-2304
[email protected]